一种基于导航系统的无人机捕获系统的制作方法
- 国知局
- 2024-08-01 00:22:26
本发明涉及无人机导航,具体涉及一种基于导航系统的无人机捕获系统。
背景技术:
1、无人机捕获是指利用无人机技术执行物体捕获、搬运或投放任务的过程,这种技术在军事、民用和商业领域都有广泛的应用,为了实现精准的物体捕获,无人机捕获系统通常配备有先进的导航系统,以确保其能够准确地定位和移动,总的来说,无人机捕获系统在各个领域中都有重要的应用价值,导航系统是其核心技术之一,能够确保无人机安全、高效地执行各种任务。
2、现有技术中,导航系统虽然可以提供无人机的实时位置和速度信息,但在预测其未来轨迹时,易受到风力、障碍物的影响,会导致预测轨迹与实际轨迹存在偏差,从而影响捕获的准确性,进而导致捕获失败,因此,如何减小无人机捕获过程的预测轨迹偏差,提高捕获的成功率,是我们要解决的问题,为此,现提出一种基于导航系统的无人机捕获系统。
技术实现思路
1、本发明目的在于提供一种基于导航系统的无人机捕获系统,以解决上述背景技术中提出的问题。
2、为解决上述技术问题,本发明所采用的技术方案是:
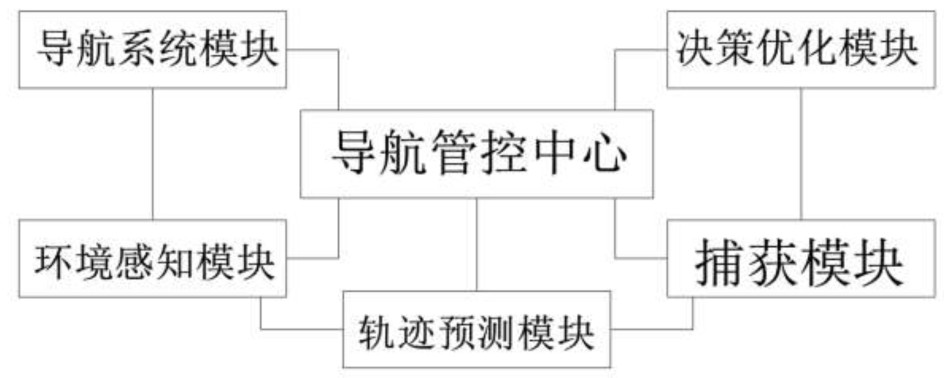
3、一种基于导航系统的无人机捕获系统,包括导航管控中心,所述导航管控中心通信连接有导航系统模块、环境感知模块、轨迹预测模块、捕获控制模块以及决策优化模块,其中,各模块间电信号连接;
4、所述导航系统模块,用于提供无人机实时的位置、速度和姿态信息,使无人机按照预定的轨迹进行飞行,通过高精度的gps接收器、imu传感器,为无人机提供准确的位置和姿态数据;
5、所述环境感知模块,用于通过传感器和摄像头实时感知无人机周围的环境信息,包括障碍物、风速、风向;通过计算机视觉和图像处理技术,对感知到的环境信息进行实时分析和处理,为轨迹预测和捕获决策提供准确的环境数据;
6、所述轨迹预测模块,用于根据无人机的实时状态和环境信息,构建轨迹预测模型,以预测无人机的未来轨迹,基于融合多种传感器的数据融合算法,综合考虑无人机的实时位置、速度、加速度以及环境信息,以更准确地预测无人机的未来轨迹;
7、所述捕获控制模块,用于根据预测的轨迹和无人机的实时轨迹相结合,控制捕获设备进行捕获操作,通过精确控制捕获设备的运动轨迹和速度,确保在最佳时机进行捕获操作,提高捕获设备的精度和响应速度;
8、所述决策优化模块,根据环境感知和轨迹预测的结果,制定捕获决策,并对系统进行优化调整,通过综合考虑多种因素,如目标无人机的位置、速度、姿态,以及捕获设备的状态等,制定最优的捕获策略。
9、本发明技术方案的进一步改进在于:所述导航系统模块中,无人机实时位置、速度和姿态信息的确定过程包括:
10、通过gps接收器,接收来自卫星的信号,解析无人机的经度、纬度、高度位置信息,并利用imu传感器持续监测无人机的加速度、角速度和地磁信息,用以计算无人机的速度和姿态;
11、对gps接收器接收的位置数据进行解析和校验,并对imu传感器收集的数据通过融合算法进行处理,去除噪声和误差,计算出无人机当前的速度和姿态;
12、将处理后的位置、速度和姿态数据以标准格式输出至轨迹预测模块,用于构建和更新无人机的飞行轨迹模型。
13、本发明技术方案的进一步改进在于:所述环境感知模块中,环境信息的获取过程包括:
14、获取无人机的实时状态数据,使用如雷达、超声波、激光雷达、红外线传感器等的各种传感器收集无人机周围的环境数据,用以提供关于障碍物距离、形状、大小以及相对位置的信息,并通过高清摄像头捕获无人机飞行路径上的图像信息;
15、对采集到的数据进行预处理,包括数据清洗、去除噪声、校正误差,数据清洗去除缺失数据、异常数据和重复数据,确保后续分析的准确性;
16、通过计算机视觉和图像处理技术对预处理的传感器数据和图像信息进行分析,检测障碍物,并利用风速风向传感器,分析当前的风速和风向,为无人机的飞行轨迹规划提供参考;
17、将来自不同传感器和摄像头的数据进行融合,综合多源数据获得飞行环境数据,提高环境感知的准确性和鲁棒性,对融合后的飞行环境数据进行实时分析和处理,根据无人机的当前状态和飞行任务,更新环境状态,并将分析得到的飞行环境数据提供给轨迹预测模块,辅助其进行飞行轨迹的预测。
18、本发明技术方案的进一步改进在于:所述轨迹预测模块中,无人机未来轨迹的预测过程包括:
19、从收集的无人机实时状态数据和飞行环境数据中提取特征,分析无人机的速度变化率和加速度变化率,获取无人机的运动状态,其中,无人机实时状态数据包括位置、速度、加速度、姿态,飞行环境数据包括风速、风向、气压、温度;
20、根据选定的特征,结合无人机的速度变化率和加速度变化率数据获取数据集,将数据集划分为训练集和测试集,利用训练集结合机器学习模型构建轨迹预测模型,并采用测试集对训练的轨迹预测模型进行测试;
21、利用训练好的模型,根据当前的无人机状态和环境信息,预测未来的轨迹,综合预测的轨迹与实际轨迹,获得误差评估系数,评估预测轨迹的准确度。
22、本发明技术方案的进一步改进在于:所述速度变化率的计算公式为:
23、;
24、其中,为速度变化率,通过计算位置数据的时间差分来得到速度,即速度向量,为时间点时的位置,为时间点时的位置,为位置变化量,为时间间隔;
25、所述加速度变化率的计算公式为:
26、;
27、其中,为加速度变化率,通过计算速度数据的时间差分来得到加速度,即加速度向量,为时间点时的速度,为时间点时的速度,为位置变化量,为时间间隔。
28、本发明技术方案的进一步改进在于:所述误差评估系数的计算公式为:
29、;
30、其中,为误差评估系数,用于衡量轨迹预测模型的准确度,为预测的轨迹点数量,为预测的第个点的无人机位置,为第个点的无人机实际飞行位置,误差评估系数的取值范围为。
31、本发明技术方案的进一步改进在于:所述捕获控制模块中,实施捕获操作的过程包括:
32、从轨迹预测模块获取预测的无人机轨迹,结合目标无人机的实时位置、速度、加速度状态信息,以及捕获设备的当前状态,包括位置、速度、加速度限制,确定是否进行捕获操作;
33、使用b样条插补的轨迹规划算法,结合预测的轨迹、捕获设备的当前位置和状态、目标无人机的状态,计算捕获设备的最佳运动轨迹,并输出轨迹,用于指导捕获设备的运动。
34、本发明技术方案的进一步改进在于:所述b样条插补的轨迹规划算法根据b样条基函数和b样条曲线而实现,其中,b样条曲线基于b样条基函数,b样条基函数的线性组合用以表示轨迹的坐标;
35、b样条基函数通过递归方式定义,其取决于b样条的阶数,b样条基函数的递归公式为:
36、;
37、 ;
38、其中,为b样条基函数,为控制点的索引,为b样条的阶数,决定了b样条曲线的平滑程度,如表示三次b样条,为参数值,的取值在0到1之间,决定了b样条曲线上某一点相对于控制点的位置,和为节点向量中的元素,用于在递归计算b样条基函数时确定时间间隔,为节点向量中的节点值,定义控制点之间的时间间隔。
39、本发明技术方案的进一步改进在于:所述b样条曲线对于三维空间,其计算公式为:
40、;
41、 ;
42、其中,为对于三维空间的b样条曲线,表示 b样条曲线上对应于参数的点,分别为b样条曲线上对应于参数的点的、、坐标,为b样条曲线的控制点,用于定义曲线的形状。
43、本发明技术方案的进一步改进在于:所述决策优化模块中,捕获决策的制定过程包括:
44、根据预测的捕获设备及无人机运动轨迹和实时状态信息,结合预设的捕获规则和策略,制定捕获决策;
45、将规划出的轨迹按时间进行离散化,得到一系列的时间点和对应的位置、速度、加速度指令,根据离散化的轨迹指令,生成控制捕获设备的具体指令,如电机的转动角度、速度等;
46、将生成的控制指令传递给捕获设备的执行机构,如电机、舵机等,捕获设备按照接收到的指令进行运动,确保在最佳时机到达预定的捕获位置;
47、通过传感器实时检测捕获设备和目标无人机的状态信息,根据实时反馈的信息,对捕获设备的运动轨迹和速度进行微调;
48、当捕获设备成功捕获目标无人机后,进行捕获确认;
49、捕获任务结束后,对系统的性能进行评估,包括捕获成功率、捕获时间、安全性指标。
50、由于采用了上述技术方案,本发明相对现有技术来说,取得的技术进步是:
51、1、本发明提供一种基于导航系统的无人机捕获系统,通过高精度的导航系统和环境感知技术,实时获取目标无人机的精确位置、速度和姿态信息,结合轨迹预测算法,能够准确预测目标无人机的未来轨迹,为捕获操作提供可靠的数据支持,同时,通过b样条轨迹规划算法,能够计算出捕获设备的最佳运动轨迹,确保在最佳时机以最高精度捕获目标无人机,大大提高了捕获的成功率和效率。
52、2、本发明提供一种基于导航系统的无人机捕获系统,通过集成多种传感器和先进的导航技术,实时感知目标无人机和捕获设备的状态信息,能够对采集的信息进行实时分析和处理,及时发现潜在的风险和隐患,同时,决策优化模块根据实时数据调整捕获策略,保证捕获设备在最佳位置、最佳时机进行捕获操作,显著提高无人机捕获的精度和准确性,减少捕获误差,增强系统的可靠性。
53、3、本发明提供一种基于导航系统的无人机捕获系统,通过自动化和智能化的技术手段,实现了对目标无人机的快速、精确捕获,相比传统的人工捕获方式,能够显著降低人力成本和时间成本,同时,由于系统具备高效、稳定的运行能力,能够大大提高捕获任务的执行效率和成功率。
本文地址:https://www.jishuxx.com/zhuanli/20240730/200808.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表