一种水下装备电机自适应环形减振机构
- 国知局
- 2024-07-31 17:25:17
本发明属于水下装备电机减振,具体涉及一种水下装备电机自适应环形减振机构。
背景技术:
1、随着对海洋探索的愈加重视,用于海洋勘探、目标识别和管道检测等的水下装备如自主水下航行器(uuv)被大力研究并广泛应用,噪声级是水下航行器如潜艇和鱼雷的一项重要性能参数,能够对其自导性和隐蔽性产生极大影响。以鱼雷为例,其攻击隐身已成为水下隐身作战的重要组成部分,鱼雷辐射噪声大时,敌方舰艇可在较远距离报警,并及时采取对抗措施,大幅降低鱼雷命中概率和平台生存性。而为水下装备提供航行动力的电机在运行时会产生机械振动噪声,这不仅不利于隐蔽性,电机振动还对其自身和其他元器件的运行稳定性有较大影响。
2、与汽车的行驶振动不止受转速的影响、还与路面颠簸程度有关不同,水下装备在低速行驶时处于低载状态,其扭矩小,电机振动频率较低;但一旦高速行驶时,水下装备的电机所需功率与速度成立方关系增长,电机转速大幅增加,由于转子高速旋转带来的惯性力增加,电机振动频率也大幅增加。通常,本领域中所指的水下装备、如航行器高速指的是大于其舰船的航速,一般大于30kn,设定该速度的原因在于,只有达到舰船速度,才能实现与己方舰船的协同作业等任务,航行器低速指的是5kn左右的潜行速度。
3、目前对水下装备电机的减振普遍采用在装备舱段壳体上设置减振装置再将电机安装在减振装置上的方式,这种减隔振方式,其减振频率固定,无法适配不同航速下的电机减隔振需求。为了实现减振频率可调以提升减振效果,有技术人员提出使用传感器等检测装置监测水下航行器航速以便于进行主动调节减振频率,这种减振方式需要外设传感器等元件,设计冗余,不满足水下装备结构紧凑的特点。
技术实现思路
1、为解决现有水下装备电机采取在装备舱段壳体与电机之间设置减振装置的减振方式时减振频率固定而无法适配不同航速下的减隔振需求、以及使用检测装置以便于主动调节减振频率时导致装备结构冗余的问题,本发明提出一种水下装备电机自适应环形减振机构。
2、本发明的发明构思:
3、本发明提出对水下装备电机采取被动泵+空气弹簧的被动自适应减振方式,直接由电机转子轴驱动被动泵,被动泵将空气压入空气弹簧,由此来实现电机的减隔振,在由电机转子轴驱动被动泵的这种方式下,当转子轴以较低速度旋转时,电机振动频率低,此时被动泵压力较低,压入空气弹簧的空气量少,空气弹簧的刚度小,而当转子轴速度增大到一定程度时,电机振动频率高,而被动泵压力也随转子轴转速提高而增大,所压入的空气量增加,空气弹簧的刚度大,从而初步实现了减振性能随转子轴转速的自适应调节。
4、进一步地,申请人在仿真设计和实验过程中发现,采用上述自适应变化措施后,水下装备在高速航行阶段的某些航速点下电机振动频率仍超出了安全振动频率范围,通过分析发现,是因为虽然随转子轴转速提高,被动泵压力增大,减振性能提升,但由于转子轴转速提高后,电机振动频率大幅提升,减振性能的提升不足以满足振动频率的提升,导致电机在高速状态某些航速点下振动频率超出了安全振动频率范围。针对这一新的问题,申请人考虑由于被动泵参数、转子轴转速等设计量已经固定,而空气弹簧初始压力值可以进行优化,以进一步提高减振性能,为此本发明进一步提出了空气弹簧初始压力值优化设计方法,基于水下装备采用被动泵和空气弹簧进行减振的应用场景,提出了相应的优化目标,对空气弹簧的初始压力值进行优化设计,实现水下装备在航行阶段的整个航速范围区间内,均能够通过被动泵及空气弹簧实现对电机振动的充分缓冲,在确保电机振动频率在安全振动频率范围内的情况下提升减振效果。
5、为实现上述目的,本发明所提供的技术解决方案是:
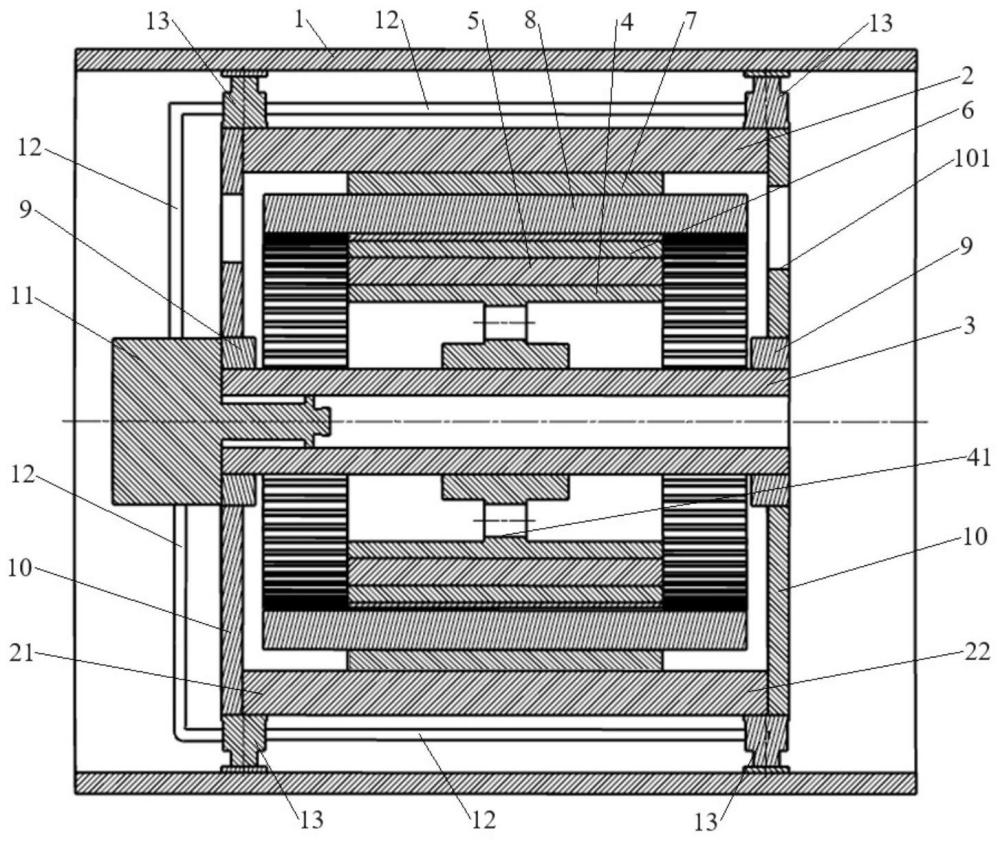
6、一种水下装备电机自适应环形减振机构,其特殊之处在于:包括被动泵、进气管和两组空气弹簧;
7、被动泵通过电机的电机壳体来固定,且与电机的转子轴同轴连接;
8、两组空气弹簧各自包括多个空气弹簧,并且分别在由水下装备的电机舱段壳体与电机壳体形成的环形腔中、在电机壳体的两端环绕电机壳体周向均布在垂直于航向方向的同一平面中,两组空气弹簧中的每个空气弹簧的一端均连接至电机舱段壳体,另一端均连接至电机壳体;
9、进气管用于连通被动泵与各个空气弹簧。
10、进一步地,空气弹簧的初始压力值参数根据以下仿真优化设计方法来确定:
11、步骤1,建立电机、电机舱段和减振机构的参数化模型;
12、步骤2,根据目标航速范围的航速下限值确定电机转子轴转速,对参数化模型进行运动学仿真,以航速下限值的电机振动频率在电机安全振动频率范围内为条件,获得空气弹簧初始压力值参数范围,并设定参数选取步长;
13、步骤3,从步骤2得到的空气弹簧初始压力值参数范围中选取一个压力值作为空气弹簧初始压力值;
14、步骤4,在目标航速范围内按步长选定n个航速点vi,根据每个航速点确定对应的电机转子轴转速,进而得到对应的被动泵泵送的空气压力,根据被动泵泵送空气的压力以及空气弹簧初始压力值,对参数化模型进行运动学仿真,得到n个航速点vi下电机的振动频率fi,i=1,2,3,……,n;
15、步骤5,基于步骤4得到的电机振动频率fi,判断在不同航速vi下,电机振动频率fi是否在电机安全振动频率范围内,若是,则进入步骤6;否则,在步骤2的参数范围内调整空气弹簧初始压力值,并执行步骤4;
16、步骤6,基于不同航速vi下的电机振动频率fi,计算电机平均振动频率δf,并保存当前空气弹簧初始压力值和对应的电机平均振动频率δf作为一个样本点;
17、步骤7,判断是否遍历步骤2中的空气弹簧初始压力值参数范围内的参数值,若否,则返回步骤3,继续采集样本点;若是,则样本点采集完成,进入步骤8;
18、步骤8,通过代理模型对样本点的集合进行近似,并利用优化算法,以目标航速范围内所有航速点下电机平均振动频率δf最小为优化目标,进行优化参数寻优,当优化算法不断迭代至收敛时,得到满足优化目标的空气弹簧初始压力值。
19、进一步地,两组空气弹簧各自包括四个空气弹簧。
20、进一步地,两组空气弹簧布置成在电机壳体的周向上彼此相差0°。
21、进一步地,进气管包括分别将被动泵与两组空气弹簧中的一组空气弹簧相连的四根管以及分别将该组空气弹簧一一对应地连接至另一组空气弹簧的四根管。
22、本发明的优点是:
23、1、本发明的水下装备电机自适应环形减振机构,包括被动泵、进气管和两组空气弹簧,具有变刚度特性的空气弹簧均连接在电机舱段壳体与电机壳体之间,两组空气弹簧分别在电机壳体的两端围绕电机壳体环形均布,进气管将被动泵与各个空气弹簧连通,电机的转子轴能够带动被动泵将空气压入空气弹簧。因此,在本发明中,被动泵泵送空气的压力随转子轴转速的提高而增大,压入空气弹簧的空气量相应增加,空气弹簧刚度增大,能实现减振性能随转子轴转速的自适应变化,进行自适应减振,而无需单独设置传感器等检测装置检测振动频率来作为调节减振频率的参考,本发明减少了电机机械振动传递和噪声传播,从而达到降低水下装备航行辐射噪声的要求。
24、2、本发明对空气弹簧初始压力值参数进行了仿真优化设计,可保证水下装备在航速范围内的高速航行阶段,能将电机振动充分缓冲,在确保电机振动频率在安全振动频率范围内、满足电机减隔振需求的情况下提升减振效果,由此提高电机及水下装备的运行稳定性。
本文地址:https://www.jishuxx.com/zhuanli/20240731/175435.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。