一种不良环境下道路图像增强与行驶区域检测系统
- 国知局
- 2024-07-31 20:18:33
本发明涉及汽车视觉处理和检测,更具体地说,本发明涉及一种不良环境下道路图像增强与行驶区域检测系统。
背景技术:
1、随着科技技术的日益进步和人们生活水平的不断提高,汽车行业的发展也如日中天,结合科技化的汽车道路智能检测是当下研究学者不断实验验证的智能化检测系统,众所周知,汽车是一个交通工具时代的进步,新的事物新的发展就会给大众带来利弊,或是出行快捷便利,促进经济发展;或是意外车祸,人财皆损,因此,在汽车发展的道路上,实时检测行驶区域的状况是提高使用者人身安全的保障,也是避免危害障碍的预警把控。
2、现有的汽车检测系统在良好的天气环境下,安全性能较高,检测行驶区域的图像清晰且容易判断,给驾驶员提供了良好的道路图像信息及车辆行驶视觉信息,但是针对不良环境下,检测系统缺乏采集道路图像处理效果及不全面检测行驶区域,因此,在不良环境下道路图像增强与行驶区域检测系统给驾驶员带来很大的行驶风险。
3、目前,现有的不良环境下道路图像增强与行驶区域检测系统通过车载摄像头扫描道路情况,采集道路图像、视频数据信息传输到处理器中进行图像分割、灰度化及边缘化处理,增强道路图像效果,利用bp神经网络的机器学习方法对道路特征进行提取检测,存在光照、风雨、沙尘及雾霾不良环境时,车载摄像头采集清晰度差,出现道路图像误差的问题,以及存在路面检测和采集图像处理不精确,驾驶员在中控面板显示的视频跟踪有误,导致出现汽车碰撞、摩擦的损耗问题。
技术实现思路
1、为了克服现有技术的上述缺陷,本发明的实施例提供一种不良环境下道路图像增强与行驶区域检测系统,通过增加光敏感应补光模块和改善道路图像处理模块及行驶路面检测模块的算法,以解决上述背景技术中提出的问题。
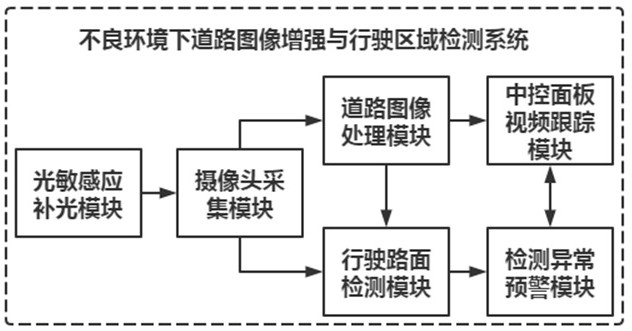
2、为实现上述目的,本发明提供如下技术方案:一种不良环境下道路图像增强与行驶区域检测系统,包括光敏感应补光模块,均匀设置在汽车底部及底部车身轮廓处,用以对昏暗环境下给汽车行驶区域进行照明,通过利用光控led照明灯给行驶的汽车在不良环境下提供光照强度,便于汽车摄像头采集行驶路面的图像更清晰,提高汽车行驶的安全度;
3、摄像头采集模块,与道路图像处理模块和行驶路面检测模块网络协议连接,摄像头安装在车内、汽车前后面底部处,用以对行驶视野内汽车轮廓、运行状态、道路结构及路面行驶其他车辆进行图像采集和倒车影像的采集,利用高清广角摄像头和红外线摄像头的组合结构,通过汽车行驶过程中,拍摄汽车运行状态的图像视频,并把采集的图像信息传输到道路图像处理模块中进行数据处理;
4、道路图像处理模块,分别采用网络协议、端口连接摄像头采集模块、行驶路面检测模块及中控面板视频跟踪模块,将摄像头采集模块采集的图像视频进行增强处理,并把处理后的图像数据传输到行驶路面检测模块进行检测,以及通过中控面板视频跟踪模块对检测行驶区域进行反馈,利用计算机对采集图像进行分析,经过图像压缩、增强、复原、描述和识别处理,得出摄像头采集图像的清晰画面;
5、行驶路面检测模块,分别采用网络协议、端口连接摄像头采集模块、道路图像处理模块及检测异常预警模块,检测识别道路图像处理模块处理后的清晰图像的物体,并判断检测物体对行车状态是否存在隐患,并把判断隐患为是的信息传输到检测异常预警模块中进行警告;
6、检测异常预警模块,与行驶路面检测模块和中控面板视频跟踪模块网络协议连接,接收行驶路面检测模块传输的异常信息进行预警显示,从中控面板视频跟踪模块中反馈到驾驶员进行反应调整,降低行车损失,通过多种预警方式对驾驶员进行提醒控制;
7、中控面板视频跟踪模块,与道路图像处理模块和检测异常预警模块网络协议连接,通过接收道路图像处理模块对图像处理后的图像进行复原呈现,以及对检测异常预警模块时触发的汽车运行状态的影像呈现,具体呈现形式以3d图像展示汽车运行状态中的物理模型动态图、汽车倒车影像及跟踪车辆的控制图。
8、在一个优选地实施方式中,所述光敏感应补光模块是由光控led照明灯通过连接电路,安装在有三极管串联连接led照明灯、光敏电阻和led限流电阻,以及并联连接分压偏执电阻和usb接口的组成电路,光敏感应补光模块通过usb接口连接汽车电源,在检测光照强度达到设定的限值时,光敏电阻阻值变小,电路中连接的光控led照明灯自动照明,补充光照,提高昏暗环境下的光照强度,电路中安装led限流电阻是防止led照明灯使用过程中电流过大导致使用寿命短,其中,光控led照明灯是一种节能照明灯具,具有节能、环保、寿命长及体积小的特点;分压偏执电阻是为三极管提供电流,保护电路,起到电流负反馈作用,稳定三极管的工作点;三极管是控制电流的半导体器件,目的是把微弱信号放大成幅度值较大的电信号;光敏电阻随着光照强度越大,阻值越小,光照强度越小,阻值越大,通过在i/o接口设定光敏电阻的模拟电压高低电平读取值,处于高电平状态,光控led照明灯被点亮,当处于低电平状态,光控led照明灯被关闭;led限流电阻是防止电路中电流过大烧坏光控led照明灯;usb接口是电路中数据信号的传输口。
9、在一个优选地实施方式中,所述摄像头采集模块包括车载摄像头、实时采集路面图像视频信息及图像视频信号转换处理,其中,车载摄像头是把高清红外线广角摄像头与三目广角摄像头组装在汽车的室内室外,通过摄像头拍摄采集图像视频信息;实时采集路面图像视频信息是通过车载摄像头在行车过程中对行车环境及驾驶区域的路线进行拍摄视频图像;图像视频信号转换处理是摄像头通过拍摄光信号在摄像头中转换成图像的电信号,再利用模拟转换器,将图像电信号转换成数字图像信号传输到道路图像处理模块中加工处理。
10、在一个优选地实施方式中,所述道路图像处理模块包括图像分割、图像阈值化及图像增强,其中,图像分割是将采集的图像分成若干个特定的区域,具体采用图像阈值化分割方法;图像阈值化是提取图像中的目标物体,将背景和噪声区分开,确定阈值后,对图像进行分割预处理,按照分割后的像素亮度区域进行编码传输;图像增强是对图像失真的部分从视觉效果上进行强调突出,通过采用空域法直接将图像中的像素点灰度级带入空间转换函数的数学模型中运算处理得出处理增强后的图像,其中空域法包括去噪平滑,图像增强的目的是扩大图像中不同物体特征之间的差别,抑制不感兴趣的特征,改善图像质量、丰富信息量,加强图像判读和识别的效果。
11、在一个优选地实施方式中,所述行驶路面检测模块包括otus阈值化算法处理图像、canny边缘算子提取特征及hough变换算法检测边缘,其中,otus阈值化算法处理图像是采用最大类间方差的自动确认阈值算法进行图像分割处理,用以二值化图像进行路面检测,提高分割效果;该otus阈值化算法的计算步骤为:首先计算灰度图像的全局期望;然后遍历灰度值从0到255将灰度图像分为前景与背景、求前景的期望与概率、求背景的期望与概率及由间类方差定义求当前阈值的间类方差;最后在遍历过程中,不断比较求得最大的间类方差。
12、在一个优选地实施方式中,所述canny边缘算子提取特征及hough变换算法检测边缘,其中,canny边缘算子提取特征是通过寻找满足边缘特征计算边缘检测的函数算法,其具体的算法步骤如下:首先对采集处理的图像像素进行降噪处理;然后根据图像边缘方向利用canny算法使用四个mask检测水平、垂直及对角线方向的边缘进行梯度找寻与点亮;最后跟踪边缘,利用canny的高低滞后阈值进行梯度求导,以此跟踪图像曲线边缘;hough变换算法检测边缘是将图像平面以极坐标形式展现出来,把提取图像空间中直线问题转换成参数空间进行计算点峰值的问题;其具体的算法步骤如下:首先对图像进行边缘检测得到二值边缘图像;然后通过对二值边缘图像中的每个非0点均转换为平面中的曲线;在平面中累加所有结果,则图像平面中的直线显示为平面中的局部极大值;最后根据设定的阈值对局部极大值进行筛选,得出最终结果。
13、在一个优选地实施方式中,所述检测异常预警模块包括警报鸣笛、面板显示检测异常障碍物及刹车轴锁紧,其中,警报鸣笛是汽车控制器上安装报警装置,在行驶路面检测模块中检测出道路异常障碍物时进行鸣笛警示,示意驾驶员进行安全驾驶的车辆检测;面板显示检测异常障碍物是通过行驶路面检测模块检测的图像数据信息从汽车车内中控面板中显示出异常障碍物的形状、大小及动静态;刹车轴锁紧是汽车在行驶过程中,当行驶路面检测模块检测出具有危害驾驶员和毁坏车辆风险的异常障碍物,汽车启动刹车停止前行,避免造成车祸导致车毁人亡的重大财产损失。
14、在一个优选地实施方式中,所述中控面板视频跟踪模块包括gps定位跟踪器、红外线倒车影像及行车状态3d影像,其中,gps定位跟踪器是构成车载终端系统的组成部分,其是由pic单片机组成,是用于控制汽车行驶路线与实时位置追踪,通过实时定位,探测经纬度、时间、行进方向和速度的功能,在汽车中控面板的主机上留有数据接口,通过连接外接设备和传感器,提高汽车运行安全系数;红外线倒车影像是汽车前后端安装高清远红外线广角摄像机,扫描汽车头尾部图像状况,从汽车中控面板的显示屏中显示出清晰影像,用于避免汽车倒车入库与周边环境的障碍物进行碰撞摩擦;行车状态3d影像是采用若干个三目广角摄像头安装在汽车车身的四周,采集汽车行驶过程中外部环境的影像,结合图像拼接技术形成完整的车周全景图,达到了减少车辆驾驶盲区,全面检测行驶区域环境的效果。
15、本发明的技术效果和优点:
16、本发明具体采用光敏感应补光模块增加了补光照明的功能,改善道路图像处理模块和行驶路面检测模块的数据处理算法,实现了otus阈值化分割后再进行canny算法及hough变换算法进行边缘检测计算的功能,以及实现了汽车中控面板显示的视频跟踪精确和预警提示的功能;提高了在昏暗不良环境中摄像头采集图像清晰度高的效果,达到了采集道路图像误差小、采集图像处理精确、提高汽车运行安全度以及检测行驶区域视觉佳的效果。
本文地址:https://www.jishuxx.com/zhuanli/20240731/185776.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表