一种车辆混合通行环境下交叉口交通信号控制方法
- 国知局
- 2024-07-31 20:29:20
本发明涉及城市道路交通信号控制领域,具体而言,涉及一种车辆混合通行环境下交叉口交通信号控制方法。
背景技术:
1、城市交叉口是城市道路交通网络的重要组成部分,也是交通拥堵的频发地点。交通信号控制通过管理设施对道路交通流进行调控,以提高交通运行效率和疏导交通。有效的交通信号控制方法对缓解城市交叉口交通拥堵至关重要。
2、目前的交通信号控制方法主要有以下三个方面,其各自具有一定缺陷,具体如下:
3、1、传统的交通信号控制方法存在一定局限性。定时控制方法利用历史交通流数据确定最小延误信号配时方案,但实时性有所欠缺;
4、2、驱动控制方法通过传感线圈等装置感应车辆到达情况来延长绿灯时间,但未充分考虑交叉口整体交通流的空间特征;
5、3、自适应控制方法通过智能计算和实时或历史数据,训练出适应实时车流的控制模型,但训练耗时且需大量不同情景数据。
6、近年来,我国新能源汽车市场渗透率快速增长,已经接近40%,且持续呈上升趋势。同时,车联网通信技术的实时信息和自动驾驶技术的辅助控制,为制定更为精准、灵活的交通信号控制方法提供了前所未有的可能性。对于如何利用新能源汽车所配备的车联网通信技术和自动驾驶技术,来研究交通信号控制、缓解交通拥堵问题的关注度也与日俱增。然而,目前的应用并未关注到几个重要问题。
7、首先,对车辆轨迹定位在通信时,可能存在的误差问题未得到充分重视,这导致车辆轨迹信息的准确性受到影响。
8、其次,未能妥善处理交叉口通行方向数量的适应问题,这使得信号控制方法无法灵活应对不同的交通流量和路口结构。
9、最后,忽略了算法在求解车辆驶离序列时效率的问题,从而导致实时性受限,限制了交通信号控制方法的及时应用和调整。
10、上述三点疏漏,对交通管理的准确性和效率产生重大影响。
11、因此,在利用新能源汽车所配备的车联网通信技术和自动驾驶技术的基础上,如何提高车辆轨迹定位的准确性、交通信号控制方法的灵活性和及时性,是本领域技术人员亟需解决的问题。
技术实现思路
1、本发明的目的在于克服现有技术中的上述缺陷,提供一种车辆混合通行环境下交叉口交通信号控制方法,本方法涉及交通信号控制、车联网通信技术和自动驾驶技术的协同应用,通过卡尔曼滤波器来减少对车联网通信车辆、自动驾驶汽车的定位误差;利用智慧多叉搜索树与交叉口m车道数相匹配,并应用于双层规划模型中求解,以获取车辆的最优驶离序列j和自动驾驶车辆的最优驶离轨迹,实时性高,灵活适应不同通行方向的单点交叉口,对于不满足求解条件的孩子节点,使用剪枝操作来提高搜索效率。
2、为了实现上述目标,本发明提供了一种车辆混合通行环境下交叉口交通信号控制方法,包括以下步骤:
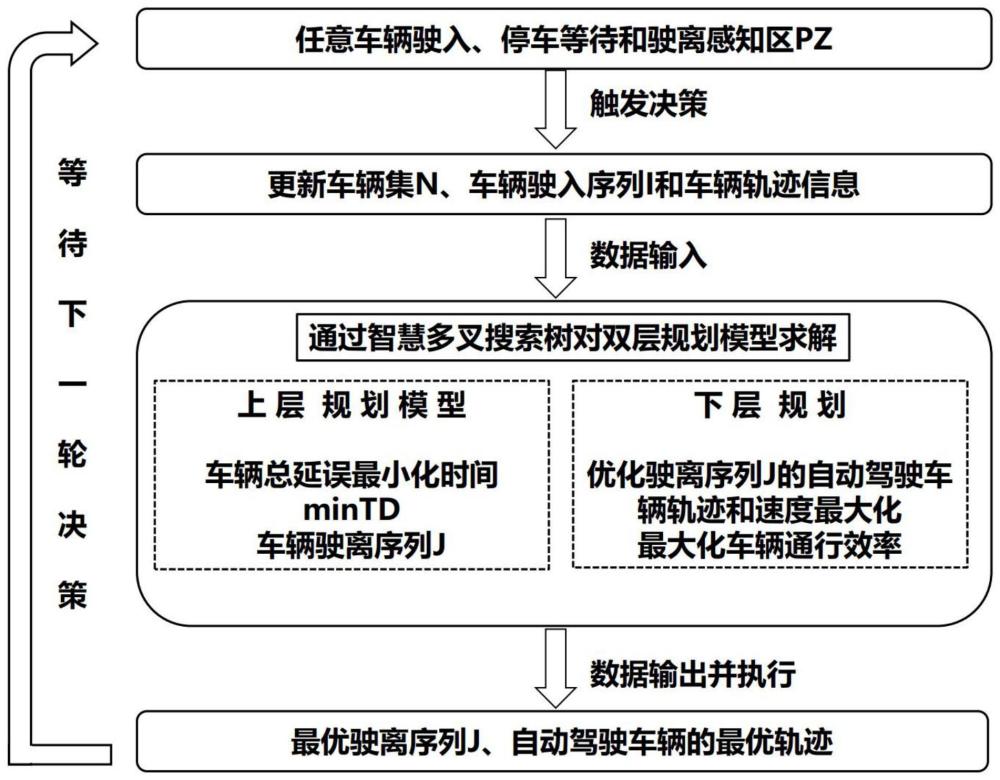
3、步骤s1:对交叉口m各进道口设定感知区pz;
4、步骤s2:当车辆驶入、停车等待和驶离感知区pz时触发交通信号控制决策;同时,对感知区pz的车辆集n、车辆驶入序列i和每辆车的轨迹信息进行更新,其中,车联网通信车辆、自动驾驶车辆通过卡尔曼滤波器降低定位误差;
5、步骤s3:将步骤s2中的各个数据输入到双层规划模型,双层规划模型包括子步骤s31的上层规划模型和子步骤s32的下层规划模型;
6、子步骤s31:通过上层规划模型求解出车辆总延误最小化时间mintd,并获得与该所有车辆总延误最小化时间mintd相匹配的车辆驶离序列j;
7、子步骤s32:通过下层规划模型对上层规划模型的车辆驶离序列j中的自动驾驶车辆驶离轨迹优化,以使得自动驾驶车辆驶入感知区pz和通过交叉口m速度最大化;
8、步骤s4:通过与交叉口m车道数相匹配的智慧多叉搜索树对步骤s3中的双层规划模型进行求解,得出最优的车辆驶离序列j和最优的自动驾驶车辆的车辆驶离轨迹;
9、步骤s5:按照步骤s4中的最优的车辆驶离序列j放行感知区pz车辆;并为自动驾驶车辆分配最优的车辆驶离轨迹;
10、步骤s6:等待下一轮交通信号控制决策系统的触发。
11、作为优选的,在所述步骤s2中,通过监测系统对车辆驶入、停车等待和驶离感知区pz进行监测,并对上述监控信号反馈至交通信号控制决策;在所述步骤s2中,当车辆驶入感知区pz时,该车辆驶入感知区pz的监控信号触发交通信号控制决策,以及,交通信号控制决策内部的车辆集n、车辆驶入序列i和每辆车的轨迹信息更新方式包括传统车辆更新方式和车联网通信车辆、自动驾驶车辆更新方式;其中,传统车辆更新方式为:其离开感知区pz和交叉口m的时间可以通过车联网通信车辆、自动驾驶车辆停车位置信息和信号配时方案进行插值估算;车联网通信车辆、自动驾驶车辆更新方式为:其驶入序列和轨迹信息由车联网通信系统提供。
12、作为优选的,在所述子步骤s31中,其所有车辆总延误最小化时间mintd的计算方法如下式(1):
13、mintd=min∑v∈n(delv,j-npv) (1)
14、其中,n表示为车辆集n,v表示为车辆集n内的任一车辆,delv,j表示为车辆v离开交叉口的时间,npv表示为在没有排队的情况下,车辆v离开交叉口m的时间,delv,j-npv表示为车辆v的延误时间;
15、v的具体表达式如下:
16、v={i,j,m};
17、其中,i∈车辆驶入序列i,i表示为车辆v在车辆驶入序列i中的位置;j∈车辆驶离序列j,j表示为车辆v在车辆驶离序列j中的位置;m∈交叉口m,m为交叉口m中所有通行方向的其中一个通行方向;
18、delv,j的具体表达式如下式(2):
19、
20、其中,v'表示为在车辆驶离序列j中,车辆v的前车车辆,delv',j表示车辆v的前车车辆离开交叉口m的时间,satm是m方向的饱和流;
21、v'的具体表达式如下:
22、车辆集n。
23、作为优选的,在所述子步骤s32中,通过newell跟驰模型分别预测车联网通信车辆和传统车辆的轨迹,同时,自动驾驶车辆的驶入感知区pz和通过交叉口m的车辆驶离轨迹和最大化速度由车辆驶离序列j中的前面车辆的轨迹信息确定,其中,包括如下步骤:
24、步骤s3210:
25、自动驾驶车辆在感应区pz时以最大化速度行使,通过感应区pz后再开始加速,若自动驾驶车辆为车辆驶入序列i中的领航车辆v1,在tinit时刻开始交通信号控制决策,最优的驶离轨迹被安排在topti时刻通过交叉口m,然后开始加速驶入交叉口m一侧的目标道路中,上述的最大化速度的计算方法如下式(3):
26、
27、式(3)中,δdist表示车辆定位误差的估计标准差,其通过卡尔曼滤波器获得,distv表示领航车辆v1与交叉口m距离,topti表示领航车辆v1通过交叉口m时刻,tinit表示决策开启的时刻;
28、步骤s3220:对上述步骤s3210的最大化速度进行约束处理,其速度约束的计算方法如下式(4):
29、
30、式(4)中,topti≤tinit表明领航车辆v1在信号灯为绿灯时间内进入感应区pz并无等待地以自由流速度sf通过交叉口m;
31、领航车辆v1的初始速度如下式(5):
32、
33、步骤s3230:
34、根据newell跟驰模型得出,若自动驾驶车辆为车辆驶入序列i中的跟驰车辆则跟驰车辆最大化速度约束速度和初始速度的计算方法如下分别如下式(6)、式(7)和式(8):
35、
36、
37、
38、其中,式(6)中的表示为该车辆进入感应区pz后与前车保持跟驰关系,
39、表示为该跟驰车辆进入感应区pz后加速跟上前车并保持跟驰关系;表示为跟驰车辆的最优轨迹受前车影响程度,jam表示拥堵密度,w表示反向波速度。
40、作为优选的,对车辆v离开交叉口的时间delv,j通过增加惩罚项pv,j用于优化车辆驶离序列j;
41、增加惩罚项pv,j后的delv,j的具体表达式如下式(9):
42、
43、式(9)中,惩罚项pv,j表示为所有车辆通过交叉口的时间;
44、pv,j的具体表达式如下式(10):
45、
46、式(10)中,sf表示为所有车辆自由流速度,l是交叉口的长度,a是车辆加速度,表示车辆v的初始速度小于自由流速度sf时的加速时间。
47、作为优选的,在所述步骤s4中,还包括如下步骤:
48、步骤s41:建立根节点root;输入:车辆集n、车辆驶入序列i、车辆速度、车辆位置;驶离交叉口区域的最后一辆车root;初始化堆栈s;s.push(root);
49、步骤s42:计算根节点驶离序列的搜索下界、上界和车辆最优速度;搜索下界的值赋值给总延误;
50、步骤s43:如果堆栈s非空,进入循环;如果堆栈s空,输出最优驶离序列j及车辆最优速度
51、步骤s44:s.pop()并赋值给当前节点n;
52、步骤s45:如果当前节点n的搜索下界大于搜索上界,则继续;
53、步骤s46:如果总延误大于搜索上界,则把搜索上界的值赋值给总延误,并更新最优驶离序列j及车辆最优速度
54、步骤s47:建立当前节点n的孩子节点;
55、步骤s48:计算孩子节点车辆的驶离时间;计算根节点root到各孩子节点的延误;计算各孩子节点的搜索下界、上界;
56、步骤s49:各孩子节点进入堆栈s;回到步骤s43。
57、与现有技术相比,本发明的有益效果在于:
58、1、本发明的一种车辆混合通行环境下交叉口交通信号控制方法,涉及交通信号控制、车联网通信技术和自动驾驶技术的协同应用,通过卡尔曼滤波器来减少对车联网通信车辆、自动驾驶汽车的定位误差。
59、2、通过双层规划模型与智慧多叉搜索树配合应用,求解出最优的车辆驶离序列j和最优的自动驾驶车辆的车辆驶离轨迹,实时性高,灵活适应不同通行方向的单点交叉口m,对于不满足求解条件的孩子节点,使用剪枝操作来提高搜索效率。
60、3、另外,本发明的智慧多叉搜索树中的多个分支与交叉口m车道数相匹配,有效解决现有二叉树数据结构的两个分支识别效率的缺陷,同时,相对于现有的webster算法、遗传算法和粒子群优化算法去求得车辆总延误最小化时间mintd数据处理更快,更有效率。
61、4、综上所述,本发明的一种车辆混合通行环境下交叉口交通信号控制方法在利用新能源汽车所配备的车联网通信技术和自动驾驶技术的基础上,通过卡尔曼滤波器、双层规划模型以及智慧多叉搜索树技术,提高了车辆轨迹定位的准确性、交通信号控制方法的灵活性和及时性,建立起有效、合理的交通信号控制,进而缓解了城市交叉口交通拥堵。
本文地址:https://www.jishuxx.com/zhuanli/20240731/186444.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。