下车辅助装置的制作方法
- 国知局
- 2024-07-31 20:29:34
本发明涉及一种能够抑制下车辅助控制的不必要的操作的下车辅助装置。
背景技术:
1、迄今为止,已知一种能够执行用于辅助车辆乘员安全下车的下车辅助控制的下车辅助装置。该下车辅助装置被配置为例如当在停车期间检测到可能干扰乘员安全下车(即,可能从车辆的一侧经过)的干扰目标的情况下检测到乘员的下车意图时执行下车辅助控制。
2、例如,日本专利申请特开no.2007-138457中描述的车门控制装置包括用于检测在车辆侧面经过的对象/物体的经过对象检测装置,并且被配置为当经过对象检测装置在车辆的滑动门处于打开状态的情况下检测到经过车辆侧面的对象时通知乘员该对象的存在以及抑制打开滑动门的操作。
3、该下车辅助装置包括“用于检测存在于车辆后方的目标以及取得与所检测到的目标相关的信息作为目标信息的目标信息取得装置”,并且基于目标信息取得装置取得的目标信息来判定所检测到的目标是否为干扰目标。该下车辅助装置通常如下所述地判定目标是否为干扰目标。
4、即,该下车辅助装置将在停车期间从车辆的左、右后角部分别向车辆宽度外侧方向(即,车辆宽度方向上的外侧方向)延伸的虚拟线设定为相交判定线。此后,该下车辅助装置基于目标信息来计算目标的移动方向,并在目标沿着移动方向继续移动时判定目标是否在预定时间内经过相交判定线。当该下车辅助装置判定为目标在预定时间内经过相交判定线时,该下车辅助装置判定该目标为干扰目标。
5、通过如上所述对被判定为干扰目标的目标执行下车辅助控制,可以降低车门或乘员与干扰目标接触的可能性。同时,当即使在不需要下车辅助控制的场景中也执行该控制时,存在使乘员烦恼的可能性,并且还存在相反地干扰乘员的安全下车的可能性。这里,目标信息的准确度可能根据目标信息取得装置的检测精度而降低,导致目标移动方向的计算结果出现误差。结果,即使当目标在沿着当前移动方向继续移动之后实际上没有与相交判定线相交时,也可能存在以下情况:该目标被判定为在预定时间内经过相交判定线的干扰目标。即,“不需要下车辅助控制的场景”是指由于目标运动方向的计算结果出现错误而将实际上与干扰目标不对应的目标错误地检测为干扰目标的场景。因此,需要抑制下车控制的不必要的操作,从而提高该控制的可靠性。
技术实现思路
1、本发明鉴于上述问题而完成。即,本发明的一个目的是提供一种能够抑制下车辅助控制的不必要的操作的下车辅助装置。
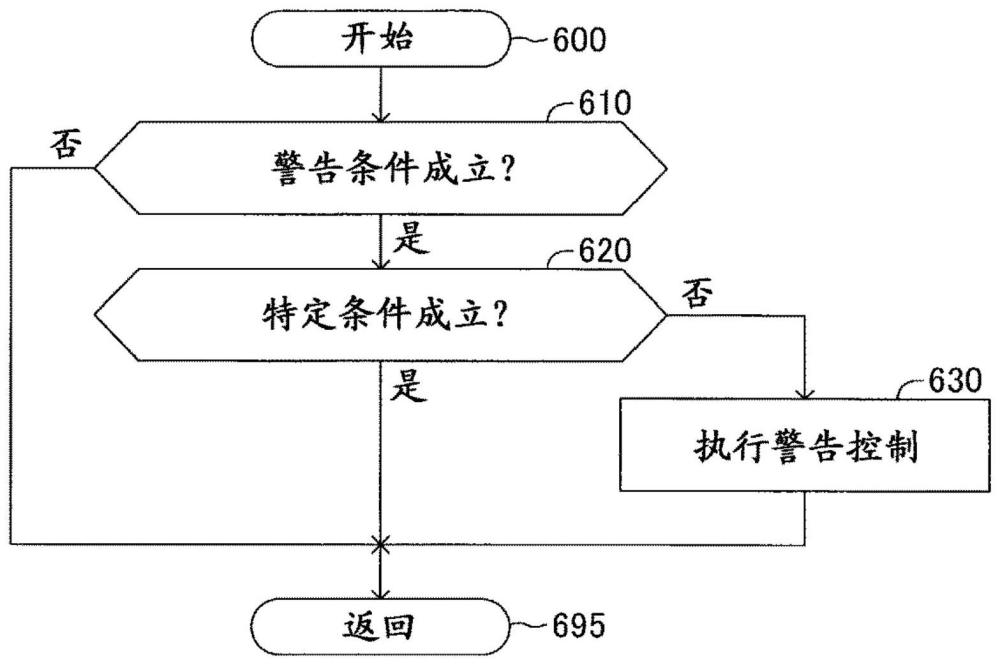
2、根据本发明的至少一个实施例(以下称为“本发明装置”)提供了一种下车辅助装置,包括:目标信息取得装置(12),其被配置为检测存在于本车辆后方的目标,以及取得与所检测到的目标相关的信息作为目标信息;和控制单元(10),其被配置为执行辅助本车辆的乘员安全离开本车辆的下车辅助控制。所述控制单元(10)被配置为:基于所述目标信息来判定是否检测到在停车期间容易干扰乘员从本车辆安全下车的干扰目标;判定下车辅助条件是否成立,所述下车辅助条件至少在检测到所述干扰目标时成立;当所述下车辅助条件成立时,判定特定条件是否成立,所述特定条件当所述干扰目标的至少一部分存在于后方车辆宽度区域(rvw)中时成立,所述后方车辆宽度区域(rvw)是在本车辆的前后方向(x轴方向)上从本车辆的左后角部向后方(x轴方向)延伸的虚拟线(l1)与从本车辆的右后角部向后方(x轴方向)延伸的虚拟线(l2)之间的区域;当所述特定条件不成立时执行所述下车辅助控制;以及当所述特定条件成立时避免执行所述下车辅助控制。
3、现有技术的下车辅助装置例如在执行条件成立时执行下车辅助控制,所述执行条件当在停车期间检测到干扰目标并且检测到乘员有下车意图时成立。对于该配置,即使当由于目标移动方向计算结果出现错误而将实际上与干扰目标不对应的目标错误地检测为干扰目标并因此执行条件成立时,也执行下车控制。因此,这样执行下车控制会导致不必要的操作。
4、这里,本发明的发明人发现,当由于目标移动方向计算结果出现错误而将一个目标错误地检测为干扰目标时,该目标倾向于在于本车辆正后方延伸的区域内移动。基于该发现,当下车辅助条件成立时,本发明装置被配置为不是立即执行下车辅助控制,而是判定特定条件是否成立,该判定条件是当干扰目标的至少一部分位于本车辆的后方车辆宽度区域内时成立的条件。当特定条件不成立时,本发明装置被配置为判定为该目标不太可能被错误地检测为干扰目标,并且执行下车辅助控制。当特定条件成立时,本发明装置被配置为判定为极有可能由于目标移动方向计算结果出现错误而将目标误检测为干扰目标,并且避免执行下车辅助控制。
5、利用该配置,可以抑制下车辅助控制的不必要操作,同时在实际需要该控制的场景中适当地执行该控制,从而能够提高下车辅助控制的可靠性。
6、根据本发明的至少一个方面,将干扰目标的前端部中的在本车辆的车辆宽度方向上最接近本车辆的部分定义为接近部(np),并且将各自都具有预定长度、位于经过本车辆的左后角部和右后角部的基准轴线(y轴)上并且分别从左后角部和右后部向车辆宽度外侧方向延伸的虚拟线定义为相交判定线(ll,lr),并且控制单元(10)被配置为:当从所述接近部(np)沿着所检测到的目标的移动方向延伸的延长线与所述基准轴线(y轴)之间的交点位于所述相交判定线(ll,lr)之一上并且预测所检测到的目标到达所述交点所需的预测时间(ttc)等于或短于预定时间阈值(ttcth)时判定为所检测到的目标是干扰目标;以及进一步当所述交点的位置的单位时间变化量的大小(|δy|)等于或大于预定的变化量阈值(δyth)时判定为所述特定条件成立。
7、本发明的发明人发现,当一目标由于移动方向计算结果出现错误而被错误地检测为干扰目标时,从接近部沿着该目标的移动方向延伸的延长线与基准轴线的交点位置的单位时间的变化量的大小往往较大。基于此发现,本发明的至少一个方面被配置为使得,进一步当交点位置的单位时间的变化量的大小等于或大于变化量阈值时,特定条件成立。利用该配置,下车控制是否为不必要操作的判定精度变得更高,并且因此能够更适当地执行下车辅助控制。
8、根据本发明的至少一个方面,所述控制单元(10)被配置为,进一步当所述干扰目标的速度(v)在本车辆的前后方向上的分量(vx)高于0且低于预定速度阈值(vxth)和/或所述干扰目标的减速度(d)在所述前后方向上的分量(dx)等于或高于预定减速度阈值(dxth)时判定为所述特定条件成立。
9、本发明的发明人发现,当一目标由于移动方向计算结果出现错误而被错误地检测为干扰目标时,该目标往往以“在本车辆的前后方向上的分量具有相对较小的值”的速度移动,和/或以“在前后方向上的分量具有相对较大的值”的减速度移动。基于这一发现,本发明的至少一个方面被配置为使得进一步当所述干扰目标的速度在所述前后方向上的分量大于0且低于所述速度阈值时和/或所述干扰目标的减速度在前后方向上的分量等于或高于所述减速度阈值时所述特定条件成立。利用该配置,下车控制是否为不必要操作的判定精度变得更高,并且因此能够更适当地执行下车辅助控制。
10、在上面的描述中,为了便于理解本发明,在本发明的至少一个实施例中使用的附图标记被置于在括号中,并且被分配给与该至少一个实施例相对应的本发明的每个构成特征。然而,本发明的每个组成特征不限于通过附图标记指示的至少一个实施例。
本文地址:https://www.jishuxx.com/zhuanli/20240731/186466.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。