一种道路作业区智能协同动态诱导系统及其方法
- 国知局
- 2024-07-31 20:29:54
本发明涉及智能交通,尤其是涉及一种道路作业区智能协同动态诱导系统及其方法。
背景技术:
1、随着当前货物运输需求量的不断增加,承担货物运输的高速公路往往需要进行道路的日常养护、损坏修补等道路作业,以提升道路服务能力及水平。然而,道路作业期间常因部分车道封闭导致道路通行能力陡降,致使集卡在作业区瓶颈处大量排队无法通行,严重影响道路通行能力,同时增大了因道路作业导致的事故风险。
2、道路交通系统是由人、车、路和环境等诸要素构成的一个动态系统,人是最重要的因素,操控车辆的一切,而驾驶员平稳、安全操控车辆的前提是通过外界获取交通信息,从而进行驾驶判断,所以驾驶员获取行驶道路交通信息的及时性以及全面性至关重要。
3、针对当前道路施工区对驾驶员诱导信息不及时、不全面,甚至信息矛盾等问题,现有技术已进行了相关研究,比如中国专利cn108399765b公开了一种施工区交通智能引导系统及方法,通过结合可变信息板、智能诱导灯等组合,提升道路通行能力,但铺设大量的诱导灯作为道路标线,需考虑施工工作量、高损耗运行成本,以及铺设诱导灯影响道路平整等问题,此外,该方案仅从可变信息板等视觉角度进行诱导,忽略听力等角度对驾驶员的引导作用以及模块之间的交互作用,难以实时高效地向驾驶员提供道路作业信息及诱导方案,不利于可靠确保施工安全性。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种道路作业区智能协同动态诱导系统及其方法,能够及时准确地向驾驶员提供当前道路作业信息及诱导方案,同时简化系统构造及成本。
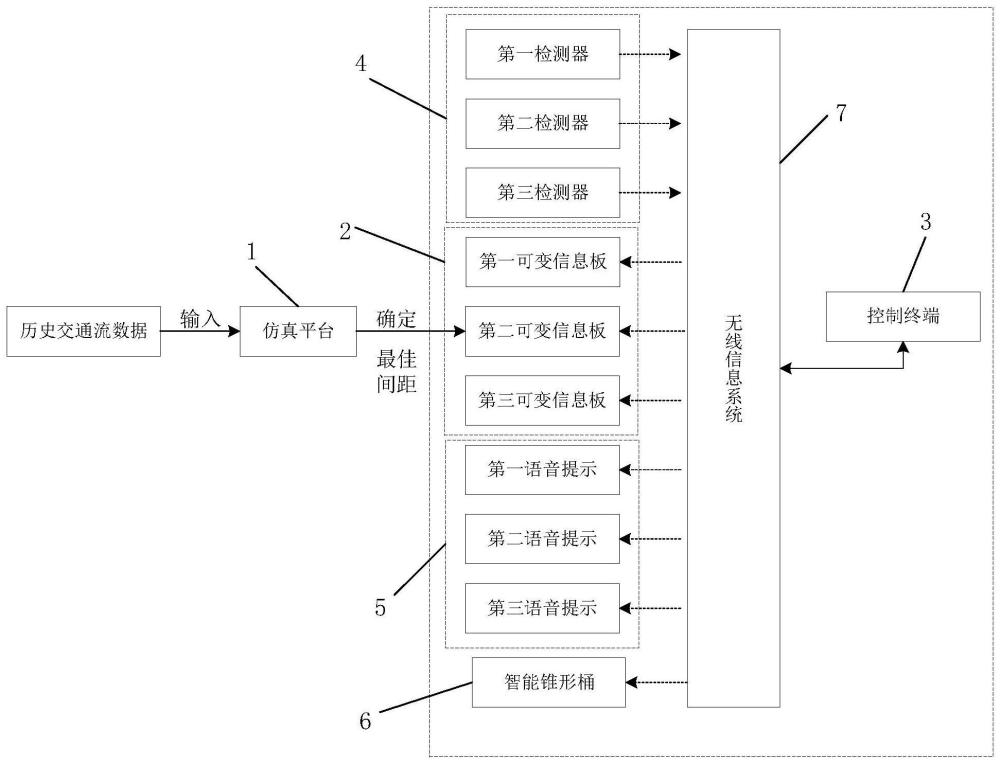
2、本发明的目的可以通过以下技术方案来实现:一种道路作业区智能协同动态诱导系统,包括智能交通仿真平台,所述智能交通仿真平台连接有可变信息展示装置,所述可变信息展示装置与控制终端相连接,所述控制终端连接有检测装置、语音提示装置和智能锥形桶,所述智能交通仿真平台用于模拟作业区交通运行情况,并以交通运行效率为目标,确定出可变信息展示装置的调整指令以及备用诱导方案;
3、所述可变信息展示装置用于动态展示诱导信息;
4、所述检测装置用于实时检测相应范围内的动态交通流信息;
5、所述控制终端用于计算相应控制路段的车辆延误、相应范围内的交通密度,以及确定当前控制周期对应的协同诱导控制方案,从而分别控制可变信息展示装置、语音提示装置和智能锥形桶的工作状态。
6、进一步地,所述可变信息展示装置、检测装置、语音提示装置以及智能锥形桶均通过无线信息系统与控制终端相连接,以实现数据信息的交互传输。
7、进一步地,所述可变信息展示装置包括设置在作业区控制路段内的第一可变信息板、第二可变信息板和第三可变信息板,所述第一可变信息板、第二可变信息板和第三可变信息板之间的间距按照相应调整指令进行调整。
8、进一步地,所述检测装置包括设置在作业区控制路段内的第一检测器、第二检测器和第三检测器,用于实时检测相应范围内的车辆类型、车辆流量、行驶速度及方向信息。
9、进一步地,所述语音提示装置包括设置在作业区控制路段内的第一语音提示模块、第二语音提示模块和第三语音提示模块,所述第一语音提示模块和第二语音提示模块用于播放前方作业区距离语音信息以及相应诱导语音信息;所述第三语音提示模块用于播放前方工作区长度语音信息以及通过该区段所需的时间语音信息。
10、进一步地,所述智能锥形桶上设置有频率可调的诱导灯。
11、一种道路作业区智能协同动态诱导方法,包括以下步骤:
12、s1、在智能交通仿真平台搭建作业区路段模型,通过输入该路段历史交通流数据,以模拟该路段交通运行情况,进而确定出可变信息展示装置的调整指令以及备用诱导方案,并将备用诱导方案传输至控制终端;
13、s2、根据调整指令,在作业区控制路段相应布设可变信息展示装置,并布置检测装置、语音提示装置和智能锥形桶;
14、s3、检测装置实时采集作业区控制路段的动态交通流信息、并传输至控制终端;
15、s4、控制终端根据接收到的数据信息,计算得到当前控制周期内的协同诱导控制方案,并分别对应发送给可变信息展示装置、智能锥形桶以及语音提示装置,以控制可变信息展示装置、智能锥形桶以及语音提示装置的工作状态。
16、进一步地,所述步骤s1中可变信息展示装置包括第一可变信息板、第二可变信息板和第三可变信息板,每个可变信息板用于展示减速或换道诱导信息,即三个可变信息板之间存在8种诱导展示方案,三个可变信息板之间预设有三种间距方案:1km、2km、3km;
17、所述步骤s1的具体过程为:智能交通仿真平台搭建作业区路段模型,通过输入该路段历史交通流数据,结合由第一至第三可变信息板组合的3种预设间距和8种诱导展示方案,模拟作业区交通运行情况,输出对应诱导展示方案的延误结果,根据延误结果确定第一可变信息板至第三可变信息板之间的最佳间距以及5种最优备用诱导展示方案。
18、进一步地,所述步骤s1中最佳间距为:
19、
20、则选择1km作为最佳间距;
21、则选择2km作为最佳间距;
22、则选择3km作为最佳间距;
23、其中,为可变信息板间距为1km情况下计算的8种诱导展示方案的平均延误时间;为可变信息板间距为2km情况下计算的8种诱导展示方案的平均延误时间;为可变信息板间距为3km情况下计算的8种诱导展示方案的平均延误时间;
24、的计算方式为;
25、
26、
27、
28、其中,i={1,2,3,4,5,6,7,8},为可变信息板间距为1km情况下,每种诱导方式下的延误时间,为可变信息板间距为1km情况下,每种诱导方式下的实际行驶时间,sl1,i为可变信息板间距为1km情况下,每种诱导方式下的计算行驶时间,l1为1km,由智能交通仿真平台确定vo为交通不拥挤条件下的畅行车速;
29、同理计算
30、所述步骤s1中5种最优备用诱导展示方案具体为:
31、在选定可变信息板之间的最佳间距l1后,将对应的8种诱导展示方案下仿真输出的延误结果进行对比分析,选择5种延误结果对应的诱导展示方案作为自适应诱导模式的储备,按延误大小升序排列分别为c1,c2,c3,c4,c5五种诱导展示方案。
32、进一步地,所述步骤s2的具体过程为:
33、将作业区道路依次划分为警告区、上游过渡区、缓冲区、作业区、下游过渡区、终止区;按照智能交通仿真平台输出的调整指令,将可变信息板最佳间距确定为l,初始状态为c3,将第一可变信息板至第三可变信息板根据该仿真结果设置在警告区内;
34、在警告区的起始断面设置第一检测器,在上游过渡区的起始断面、即警告区终止断面设置第二检测器,在下游过渡区终止断面设置第三检测器;
35、在警告区的起始断面设置第一语音提示模块,在上游过渡区的起始断面、即警告区终止断面设置第二语音提示模块,在工作区起始断面、即缓冲区终止断面设置第三语音提示模块;
36、在上游过渡区起始点至下游过渡区终点之间等间距设置多个设有频率可调诱导灯的智能锥形桶。
37、进一步地,所述步骤s4具体包括以下步骤:
38、s41、控制终端按照诱导控制周期通过第一检测器至第三检测器采集的车辆类型、车辆流量、行驶速度及方向信息,计算第一检测器至第三检测器该区段内的车辆延误,第二检测器至第三检测器该区段的交通密度;结合车辆延误指标、交通密度,判断交通运行安全情况,自适应生成最优的诱导控制方案,将该诱导方案传输至第一可变信息板至第三可变信息板、智能锥形桶;
39、s42、控制终端按照诱导控制周期通过第二检测器至第三检测器采集车辆行驶速度,计算得到通过该区段的平均时间,将信息传输至第三语音提示模块,提示驾驶员通过前方工作区长度与通过该区段所需的时间。
40、进一步地,所述步骤s41中,车辆延误为第一检测器至第三检测器该区段车辆的实际通行时间与理论通行时间之差,交通密度为第二检测器至第三检测器该区段的车辆密集程度,交通密度表征作业区路段交通运行安全指标;
41、所述交通运行安全情况为:
42、若kt>β1,则该区段一级安全——交通密度大、延误小;
43、若kt>β2,则该区段二级安全——交通密度大、延误大;
44、若kt<β3,则该区段三级安全——交通密度小、延误大;
45、若kt<β4,则该区段四级安全——交通密度小,延误小;
46、其中,为通过第一检测器至第二检测器计算的第t个诱导控制周期内的平均车辆延误,kt为通过第一检测器至第二检测器计算的第t个诱导控制周期内的交通密度;α1为一级安全的车辆延误阈值,β1为一级安全的车辆延误阈值;α2为二级安全的车辆延误阈值,β2为二级安全的车辆延误阈值;α3为三级安全的车辆延误阈值,β3为三级安全的车辆延误阈值;α4为四级安全的车辆延误阈值,β4为四级安全的车辆延误阈值;
47、
48、di,t=st-st
49、
50、
51、其中,i=1,di,t为通过第一检测器至第三检测器计算的第t个诱导控制周期内该区段的每辆车的行程延误,st为通过第一检测器至第三检测器计算的第t个诱导控制周期内该区段每辆车的实际行驶时间,st为通过第一检测器至第三检测器计算的第t个诱导控制周期内该区段每辆车的计算行驶时间,l1为第一检测器至第三检测器的间距;vo为交通不拥挤条件下的畅行车速;qt为通过第二检测器至第三检测器计算的第t个诱导控制周期内车辆流量,l2为第二检测器至第三检测器的间距;
52、所述第一可变信息板至第三可变信息板和智能锥形桶相应的诱导方案为:
53、若该区段一级安全,则可变信息板进行自适应变化,诱导方案调整为c4,智能锥形桶闪烁频率间隔为δ1;
54、若该区段二级安全,则可变信息板进行自适应变化,诱导方案调整为c5,智能锥形桶闪烁频率间隔为δ1;
55、若该区段三级安全,则可变信息板进行自适应变化,诱导方案调整为c2,智能锥形桶闪烁频率间隔为δ2;
56、若该区段四级安全,则可变信息板进行自适应变化,诱导方案调整为c1,智能锥形桶闪烁频率间隔为δ2。
57、进一步地,所述步骤s42中,平均时间为车辆通过第二检测器至第三检测器该区段所需时间:
58、
59、
60、其中,为第t个诱导控制周期内车辆通过第二检测器至第三检测器该区段所需平均时间,l2为工作区长度,为第t个诱导控制周期内第二检测器至第三检测器该区段的平均车速,vi,t为第t个诱导控制周期内通过第二检测器至第三检测器实时监测到的每辆车的速度;第三语音提示模块前方工作区长度为l2以及通过该区段所需的时间为
61、与现有技术相比,本发明具有以下优点:
62、本发明基于现有的智能交通仿真平台,通过设置可变信息展示装置、检测装置、语音提示装置、智能锥形桶和控制终端,形成道路作业区智能协同动态诱导系统。在道路作业前期,利用智能交通仿真平台模拟作业区交通运行情况,并以交通运行效率为目标,确定出可变信息展示装置的位置以及备用诱导方案;利用可变信息展示装置动态展示诱导信息;在道路作业期间,利用检测装置实时检测相应范围内的动态交通流信息;利用控制终端计算整个控制路段的车辆延误、道路作业范围内表征道路风险的交通密度,以及确定当前控制周期对应的协同诱导控制方案,从而分别控制可变信息展示装置、语音提示装置和智能锥形桶的工作状态。由此实现一种简单可靠的交通诱导方案,能够及时准确地向驾驶员提供当前道路作业信息及诱导方案。
63、本发明结合实际道路信息,利用智能交通仿真平台,以诱导路段通行能力最大为目标,从而确定出可变信息板位置及备选诱导展示方案集合,使得驾驶员能够直观准确获知当前交通诱导信息。
64、本发明利用可变信息展示装置、语音提示装置以及智能锥形桶,从视觉和听觉角度向驾驶员提示道路作业信息,以诱导路段通行能力最大、作业区道路安全系数最高为目标,协同控制可变信息板、语音提示和智能锥形桶的工作状态,能够在保证安全的前提下最大化通行能力。
65、本发明设计可变信息板、语音提示和智能锥形桶等诱导模块的协同控制,根据实时的交通流数据计算出诱导方案进行动态变化,提供实时更新的道路信息及诱导方案,从而在提升道路作业能力、降低事故风险的基础上,保证了施工人员的生命安全。
66、本发明设计通过第二检测器至第三检测器采集车辆行驶速度等微观数据,计算得到通过该区段的平均时间,再将信息传输至第三语音提示模块,以提示驾驶员通过前方工作区长度与通过该区段所需的时间,即能够在在作业区易拥堵路段实时提供拥堵距离及预计通行时间,丰富驾驶员的道路信息感知能力,从而降低事故风险。
本文地址:https://www.jishuxx.com/zhuanli/20240731/186509.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表