一种基于路侧激光雷达的高速匝道分流区碰撞预警方法与流程
- 国知局
- 2024-07-31 20:32:32
本发明涉及交通安全,具体地说是一种基于路侧激光雷达的高速匝道分流区碰撞预警方法。
背景技术:
1、中国高速公路总里程已达10多万公里,位居全球第一,为跨城市跨区域的经济、物流、出游等提供了基础交通功能。高速公路上的道路合流区提供不同匝道进入或者离开高速公路的汽车的过渡区域。
2、而由于车速差异大、驾驶员视野受限、并道窗口期短等原因,容易导致事故,道路合流区是出现意外事故的高发区域,最常见的安全隐患包括主路外侧车道车辆超速、主路和加速车道存在违停、匝道出现大货车和主路车流量大、匝道驶入车辆行为不规范等。上述现象对高速公路的安全行驶造成了极大的威胁,究其原因还是由于在道路合流区的车辆状况无法做出及时预警,从而无法提前感知事故发生的潜在性因素。
3、激光雷达作为一种新型感知设备,采用时光飞行原理,具有测量距离远、抗干扰性能强、精度高等特点目前被广泛使用在智能交通领域,将激光雷达安装在路侧,可以实现目标(行人、车辆)检测与及检测目标的位置和速度等信息。
4、但现有技术中的激光雷达应用无法实时匹配不同的道路合流区和匝道分流区的道路设计和实时路况从而基于雷达感知后的数据进行估算,其对车辆具体位置信息不能与合流区以及匝道的实际布局做出对应,从而使预警精度不高,预判性不足。并且容易受到合流区干扰物的影响,从而导致激光雷达感知的误判和重复计算等问题,对于道路交通争分夺秒的状况下,无疑增加了额外的风险因素。
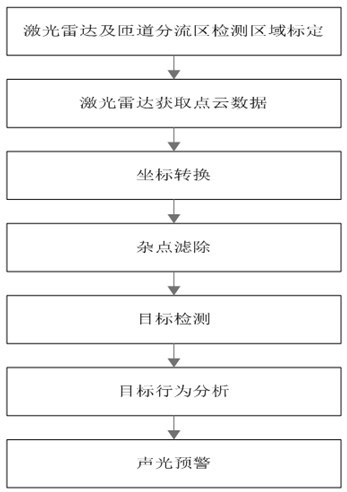
5、基于以上原因,本发明设计了一种基于路侧激光雷达的高速匝道分流区碰撞预警方法,通过在合流区设置智能化设备,检测主路、匝道的车辆并判断它们的行为,继而及时通过声光等方式提示、诱导、警告合流区车辆,帮助车辆合理的通过合流区,降低事故发生率。
技术实现思路
1、本发明的目的是克服现有技术的不足,提供一种基于路侧激光雷达的高速匝道分流区碰撞预警方法,通过在合流区设置智能化设备,检测主路、匝道的车辆并判断它们的行为,继而及时通过声光等方式提示、诱导、警告合流区车辆,帮助车辆合理的通过合流区,降低事故发生率。
2、为了达到上述目的,本发明提供一种基于路侧激光雷达的高速匝道分流区碰撞预警方法:
3、包括以下步骤:
4、s1,将激光雷达平装在高速公路导流处的护栏内,正对匝道分流区;
5、s2,实时接收、解析激光雷达数据并进行坐标转换,具体步骤如下:
6、根据实时解析后的激光雷达扫描数据把距离信息转换成x轴方向坐标数据和y轴方向坐标数据,其中:x={xi|i=0,1,...,k-1},y={yi|i=0,1,...,k-1};其中k为当前帧点云数据中的点数;
7、x轴和y轴方向的坐标数据计算方法为:
8、xi= distance i × cos(radian i);
9、yi= distance i × sin(radian i);
10、其中distance i为第i个激光雷达点的测量距离,radian i为第i个激光雷达点与激光雷达原点的夹角;
11、s3,匝道分流区检测区域标定,具体步骤如下:
12、s3-1,划分激光雷达矩形检测区域,其中x轴方向检测区域lx=[xmin,xmax],y轴方向检测区域ly=[ymin,ymax];
13、s3-2,使用在线地图软件根据经纬度信息获取匝道分流区的平面图片;
14、s3-3,划分匝道分流区,使用数据提取软件在匝道分流区的平面图上标定检测区得到x坐标数据和y轴坐标数据,其中标定检测区f={(xi ,yi)|i=0 ,1 ,...,n-1},其中n为标定的点的个数;
15、s4,点云数据过滤,滤除激光雷达检测区外的点,具体步骤如下:
16、s4-1,滤除x坐标中中满足xi>xmax || xi<xmin的坐标点;
17、s4-2,滤除y坐标中中满足yi>ymax || yi<ymin的坐标点;
18、s5,目标检测及行为分析,具体步骤如下:
19、s5-1,计算每一帧点云的实时高度最大值himax,himax的计算公式为:
20、himax = max(yi∈y);
21、s5-2,杂点滤除,判断himax同前后两个点h(i-1)max和h(i+1)max的高度差是否大于等于1000mm,如果满足此条件则滤除激光雷达x轴方向坐标和y轴方向坐标中的xi和yi;
22、s5-3,遍历滤除杂点后的x轴坐标xi∈x,判断xi是否在匝道分流区x轴坐标范围内,若是则得到匝道检测区x轴坐标对应的y轴坐标范围;
23、判断xi对应的y轴坐标yi∈y是否在匝道检测区的y轴坐标范围内,当有3帧及以上雷达点云数据中有3个以上的点在匝道检测区范围内,则认为匝道分流检测区内有行人或者车辆目标,避免灰尘、雨滴等不足3个的点云点数被激光雷达捕获从而产生噪点,进而形成误判;
24、s5-4,目标行为检测及速度计算,根据检测目标x坐标的位移判断目标行为是否逆行,并计算目标的速度v=δx/δt,其中δx表示x轴坐标的位移,δt为激光雷达的扫描周期,设定目标速度的阈值,若低于阈值则判定为静止状态;
25、s5-5,当匝道分流区连续3帧未检测到目标则认为目标已经离开匝道分流区。
26、s3-3中的数据提取软件为getdata软件。
27、s5-4中的扫描周期为64ms;速度v<3km/h则判定目标为静止状态。
28、s2中的k为274。
29、s3-1中xmin=-10000mm,xmax=30000mm,ymin=5000m,ymax=12800mm。
30、s3-3中n=54。
31、同现有技术相比,本发明具备以下有益效果:
32、本发明无需在基于路侧激光雷达的高速匝道分流区碰撞预警方法中包含的设备外添加任何其他设备即可使用,安装调试方便。
33、本发明实时预警匝道分流区车辆违停、逆行、疲劳驾驶等异常驾驶行为,提醒其及时调整驾驶行为,引导车辆合理通过匝道分流区,降低交通事故的发生率,保障生命和财产安全。
34、本发明通过将探测计算处理过的坐标与实时合流区和匝道的平面位置做出对应,提高了对于车辆位置的准确性以及车辆在合流区和匝道上的相对于位置的感知,这对于在合流区内的多辆汽车的碰撞预警起到了关键的作用,也可以通过大数据分析得出潜在的碰撞发生点从而提前做出预警提示。
35、本发明采用了滤波算法,剔除了可能存在干扰物的区域,滤除了空气中的颗粒灰尘及雨滴的影响,提高了方法的普适性与可靠性。
技术特征:1.一种基于路侧激光雷达的高速匝道分流区碰撞预警方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于路侧激光雷达的高速匝道分流区碰撞预警方法,其特征在于,所述s3-3中的数据提取软件为getdata软件。
3.根据权利要求1所述的基于路侧激光雷达的高速匝道分流区碰撞预警方法,其特征在于,所述s5-4中的扫描周期为64ms;所述速度v<3km/h则判定目标为静止状态。
4.根据权利要求1所述的基于路侧激光雷达的高速匝道分流区碰撞预警方法,其特征在于,所述s2中的k为274。
5.根据权利要求1所述的基于路侧激光雷达的高速匝道分流区碰撞预警方法,其特征在于,所述s3-1中xmin=-10000mm,xmax=30000mm,ymin=5000m,ymax=12800mm。
6.根据权利要求1所述的基于路侧激光雷达的高速匝道分流区碰撞预警方法,其特征在于,所述s3-3中n=54。
技术总结本发明涉及交通安全技术领域,具体地说是一种基于路侧激光雷达的高速匝道分流区碰撞预警方法,本发明通过将探测计算处理过的坐标与实时合流区和匝道的平面位置做出对应,提高了对于车辆位置的准确性以及车辆在合流区和匝道上的相对于位置的感知,这对于在合流区内的多辆汽车的碰撞预警起到了关键的作用,也可以通过大数据分析得出潜在的碰撞发生点从而提前做出预警提示。技术研发人员:王益章,孙洁,陈杰,张之震受保护的技术使用者:上海捷崇科技有限公司技术研发日:技术公布日:2024/5/29本文地址:https://www.jishuxx.com/zhuanli/20240731/186774.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。