一种基于改进VGG与StrongSORT的高速公路团雾预警系统及方法
- 国知局
- 2024-07-31 20:34:14
本发明属于道路交通领域,具体涉及一种基于改进vgg与strongsort的高速公路团雾预警系统及方法。
背景技术:
1、我国高速公路多数路段处于空旷地区,公路附近一些排放污染物颗粒的增加,如秋季焚烧秸秆、工业粉尘排放、汽车尾气排放等都会利于团雾的形成;同时高速公路路面白天温度较高,昼夜温差较大,地面辐射冷却使得贴近地面的空气变冷、饱和比湿下降导致产生利于团雾形成的局部小气候环境。
2、团雾,在本质上也是雾气,是受局部地区微气候环境的影响,在大雾中数十米到上百米的局部范围内,出现的更浓、能见度更低的雾。团雾区域性强、预测难度大。在高速公路上,团雾会导致能见度的突然变化,对高速公路交通安全极具危害性,容易酿成重大交通事故。
3、当前现有的气象预警系统多采用传感器或红外线测量法判断突发气象情况,检测精度较低且不能判断团雾能见度,因此提出一种基于改进vgg与strongsort的高速公路团雾预警系统及方法来解决上述问题,这对保证高速公路车辆行驶安全和高速公路相关部门的管理提供了很大的便利。
技术实现思路
1、本发明针对现有预警装置检测精度低且不能判断团雾能见度的问题,提出一种基于改进vgg与strongsort的高速公路团雾预警系统及方法。本发明能够及时对突发的团雾能见度进行判断,并及时向汽车驾驶员预警团雾情况,提醒驾驶员降速以此保证驾驶安全,减少由于团雾遮挡视线所导致的交通事故。
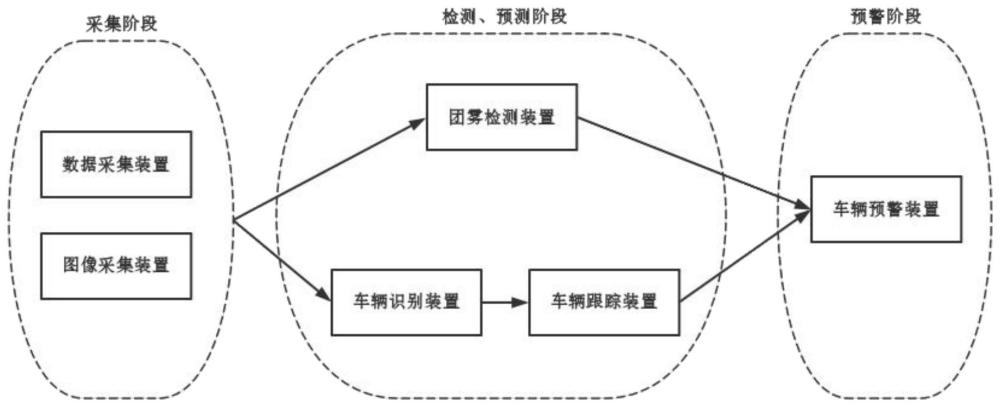
2、为了实现上述目的,本发明通过以下技术方案予以实现:一种基于改进vgg与strongsort的高速公路团雾预警系统,包括图像采集装置、团雾检测装置、车辆识别装置、车辆跟踪装置以及车辆预警装置;
3、图像采集装置利用路侧摄像头实时监控并采集高速公路场景画面,将所拍摄的实时场景视频传输到团雾检测装置、车辆识别装置和车辆跟踪装置;
4、车辆识别装置根据传输视频,实时检测与识别高速公路中的运行车辆,并将车辆位置信息与车辆类别信息传输到车辆跟踪装置;
5、车辆跟踪装置根据传输视频与车辆识别装置的车辆识别结果,对车辆进行实时跟踪,并将车辆跟踪结果传输到车辆预警装置;
6、团雾检测装置从传输视频中每隔一定时间解码出一帧关键帧图片,基于此图片检测高速公路中突发的团雾信息,并将结果传输到车辆预警装置;
7、车辆预警装置根据车辆跟踪结果与团雾检测结果,通过道路指挥中心平台判断目标车辆与突发团雾的距离,对即将行驶团雾出现区域的目标车辆发出团雾预警与降速提醒。
8、进一步的,所述车辆预警装置根据团雾检测装置检测结果中的不同能见度等级,对跟踪的且即将行驶穿越突发团雾区域的车辆,进行不同程度的预警并提醒降速;车辆预警装置包括信息接收平台、道路指挥中心平台、路侧电子警示牌、用户前端展示界面;用户前端展示界面为车辆搭载装置,用于向驾驶人播报团雾能见度情况并进行语音播报,提醒车辆驾驶人提前减速。
9、进一步的,所述道路指挥中心平对高速公路突发团雾进行数据记录,针对易发区域、出现时间、能见度等信息按照每日、每周、每月的形式进行梳理统计,并生成汇总信息,便于高速公路相关部门对于高速公路突发气象情况进行分析。
10、进一步的,还包括数据采集装置,数据采集装置采集相关信息辅助判断团雾生成与后期道路指挥中心平台进行数据分析,数据采集装置包括温度传感器、湿度传感器、风速风向传感器与pm2.5检测传感器。
11、进一步的,所述团雾检测装置利用能见度检测模块与团雾检测模块,输出团雾检测结果,具体方法如下:
12、首先,构建高速公路团雾数据集:收集高速公路摄像头历史突发团雾视频作为样本数据,通过旋转、翻转、裁剪、平移以及噪声变换方式进行样本数据增强,并使用labelme标注软件对团雾位置信息与能见度信息进行标注,构建高速公路突发团雾数据集;
13、其次,输出突发团雾能见度信息:能见度检测模块利用构建好的高速公路团雾数据集训练改进的vgg网络模型,在训练好后,接收传输视频,输出突发团雾的能见度信息;
14、最后,输出团雾位置信息:团雾检测模块利用构建好的高速公路团雾数据集训练团雾检测模块,训练好后,接收传输视频,使用目标检测模型yolov5对当前传输视频进行突发团雾检测,输出团雾位置信息。
15、进一步的,所述改进的vgg网络模型包括10个卷积层,每两个卷积层为一组,相邻组之间设置最大池化层,最大池化层采用步长为2的池化操作;在池化层后添加归一化层,目的是计算每个训练批次的数据均值与方差并进行映射,以此提高准确率,降低迭代次数。最后一个归一化层后连接全局平均池化层,并增加一个丢弃率为0.5的dropout层,最终的损失函数采用加权损失函数进行分类。
16、进一步的,所述加权损失函数表达式为:l=αlc+(1-α)ls,其中α为权重系数,lc为center loss损失,ls为softmax loss损失;
17、center loss损失函数表达式为:softmax loss损失函数表达式为:其中,xi表示n个样本属于属于yi的第i个特征,wj表示在全连接层参数矩阵中位于第j列,表示第类别的特征中心,b表示偏置量。
18、进一步的,所述车辆识别装置将图像采集装置采集到的传输视频解码为单帧图片,调用深度学习目标检测算法yolov5,对当前高速公路中的行驶车辆进行识别与定位,并计算置信度;根据不同类别的目标车辆设置不同置信度阈值,系统自动过滤低于阈值的检测结果,输出车辆识别结果,结果包括目标车辆位置信息与类型信息。
19、进一步的,所述车辆跟踪装置从车辆识别装置中得到两连续帧的车辆识别结果,调用多目标跟踪算法strongsort,对两连续帧的识别结果进行匹配,并预测两关键帧的中间帧目标信息;根据车辆识别装置的检测结果,对车辆进行实时跟踪。
20、本发明保护的另外一个方案:一种基于改进vgg与strongsort的高速公路团雾预警系统的预警方法,具体过程如下:
21、步骤1:图像采集装置利用摄像头实时监测并采集高速公路场景画面,将视频传输至团雾检测装置、车辆识别装置和车辆跟踪装置;
22、步骤2:车辆识别装置将摄像头传输的视频间隔固定时间解码出一张图片作为关键帧,基于此图片调用目标检测算法yolov5对高速公路中的来往行驶车辆进行识别与定位;对于不同类别的目标车辆设置不同的置信度阈值,服务器自动过滤置信度较低的检测结果,最终输出车辆实时位置与类别;
23、步骤3:车辆追踪装置接收车辆识别结果,利用多目标跟踪算法strongsort,通过匹配、预测、更新模块实现对不同类别车辆的实时跟踪;
24、步骤4:团雾检测装置将摄像头传输的视频间隔固定时间解码出一张图片作为关键帧,基于此图片利用能见度检测模块与团雾检测模块,调用改进后的卷积神经网络vgg16与目标检测算法yolov5对突发团雾进行检测,并将团雾位置信息与能见度信息传输给车辆预警装置;
25、步骤5:根据团雾检测结果与车辆追踪结果,车辆预警装置将团雾信息与车辆跟踪信息传输至信息接收平台,道路指挥中心平台对高速公路中行驶车辆与检测到的突发团雾进行距离判断,并依据不同能见度等级的团雾检测结果,对即将行驶过突发团雾区域的车辆通过路侧电子警示牌、用户前端可视化显示进行不同程度的预警播报。
26、与现有技术相比,本发明的有益效果为:本发明首先通过车辆识别装置对高速公路中的行驶车辆进行识别,利用车辆跟踪装置实现对高速公路中行驶车辆的实时跟踪。然后,利用团雾检测装置检测突发团雾位置与能见度信息。最后车辆预警装置根据传输视频与车辆跟踪结果,联合团雾浓度检测结果,判断跟踪车辆距离突发团雾距离。
27、车辆到达预警距离后,结合当前高速公路现有电子警示牌,并在汽车端增设用户前端可视化显示,及时向汽车驾驶员预警团雾情况,提醒驾驶员降速以此保证驾驶安全,减少由于团雾遮挡视线所导致的交通事故。
本文地址:https://www.jishuxx.com/zhuanli/20240731/186930.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。