基于目标检测和时间序列分析的路口过车参数计算方法与流程
- 国知局
- 2024-07-31 20:34:07
本发明涉及智慧交通,具体涉及一种基于目标检测和时间序列分析的路口过车参数计算方法。
背景技术:
1、随着深度学习的兴起,计算机视觉模型正朝着准确率更高、性能更强、使用场景更多的方向发展。特别是近两年新出现的yolov8算法,在网络结构、损失函数、优化技术等方面的改进,极大的提高了目标检测任务的性能。相较于之前版本,yolov8算法不仅改进了目标检测任务,还新增了实例分割、姿态估计等任务,使得计算机视觉技术在交通、医疗、化工等领域被进一步广泛使用,提高了人们的工作效率。
2、在智慧交通领域中,通过路口过车数据控制信号灯的相位周期变化是解决城市道路拥堵和减少绿灯空放浪费时间的主要方法。获取过车数据的渠道主要有三种,分别为:基于传感器的方法;基于互联网大数据的方法;基于电警视频流分析的方法。在上述三种方法中,基于视频流分析的方法无异于更直观、更及时的方法。在视频分析任务中,摄像头视角差、雨雪天气等因素会导致机动车排队长度、机动车数量、可视区域内最远行驶车辆位置的估计产生影响,进而影响信号灯相位控制决策的有效性。
技术实现思路
1、本发明为了克服以上技术的不足,提供了一种计算机动车派对长度、正常行驶车辆个数以及最远形式车辆距停止线距离的三个路口过车参数,用于信号灯相位控制的决策的方法。
2、本发明克服其技术问题所采用的技术方案是:
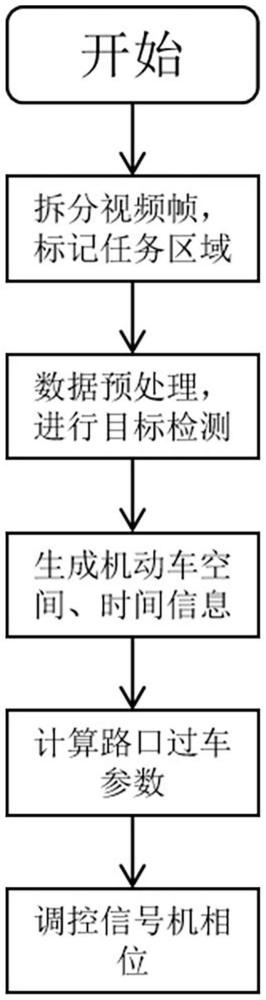
3、一种基于目标检测和时间序列分析的路口过车参数计算方法,包括如下步骤:
4、(a)获取路口电警摄像头的视频流信息,将视频进行分帧处理,得到t帧路口道路图像的图像集x,x={x1,x2,...,xi,...,xt},xi为第i帧路口道路图像,i∈{1,...,t};
5、(b)将第i帧路口道路图像xi中包含对向车道区域进行截取,得到剪裁后的第i帧路口道路图像x′i,得到所需区域图像集x′={x′1,x′2,…,x′i,...,x′t};
6、(c)对剪裁后的第i帧路口道路图像x′i进行机动车目标检测,得到机动车目标检测框列表detection_listj,detection_listj=[j,xj,yj,wj,hj],j为第j个机动车的目标检测框,j∈{1,2,...,m},m为机动车的目标检测框的数量,xj为第j个机动车的目标检测框中心点横坐标,yj为第j个机动车的目标检测框中心点纵坐标,wj为第j个机动车的目标检测框的宽度,hj为第j个机动车的目标检测框的高度;
7、(d)计算剪裁后的第i帧路口道路图像x′i的车道的近端停车线的中点与车道的远端停车线的中点之间的像素距离lse,人工测量该路口近端停车线和远端停车线对应的真实路宽wtrue及近端停车线与远端停车线之间的真实距离ltrue;
8、(e)根据像素距离lse、真实路宽wtrue和真实距离ltrue计算系数kα和系数bα;
9、(f)使用系数kα和系数bα计算机动车目标检测框列表detection_listj的位置信息car_inforj,car_inforj=[distancej,car_lengthj,stop_timej],distancej为第j个机动车的目标检测框中的机动车的车头与近端停车线的距离,car_lengthj为第j个机动车的目标检测框中的机动车的长度,stop_timej为第j个机动车的目标检测框中的机动车的静止时间,剪裁后的第i帧路口道路图像x′i中所有的位置信息构成车辆信息列表car_listi,car_listi=[car_infor1,car_infor2,...,car_inforj,...,car_inform];
10、(g)根据车辆信息列表car_listi计算得到车辆分布列表car_distributioni,其中ηk为剪裁后的第i帧路口道路图像x′i中划分的第k个区域的车辆分布信息,
11、(h)根据车辆信息列表car_listi和车辆分布列表car_distributioni计算得到排队长度l、区域内运动车辆数量n、距近端停车线最远车辆的预计通过时间t。根据排队长度l、区域内运动车辆数量n、距近端停车线最远车辆的预计通过时间t可以用于评估当前信号灯相位合理性,为产生改变相位策略做准备进一步的,步骤(a)中通过onvif协议获取路口电警摄像头的视频流信息。
12、进一步的,步骤(c)包括如下步骤:
13、(c-1)使用python中的cv2.equalizehist函数对剪裁后的第i帧路口道路图像x′i进行对比度增强处理,得到增强后的第i帧路口道路图像x″i;
14、(c-2)将增强后的第i帧路口道路图像x″i输入到yolov8目标检测模型中,得到增强后的第i帧路口道路图像x″i中若干目标检测框,将类别不为机动车的目标检测框丢弃,得到机动车目标检测框列表detection_listj=[j,xj,yj,wj,hj]。进一步的,步骤(d)包括如下步骤:
15、(d-1)剪裁后的第i帧路口道路图像x′i的车道下方的停车线为近端停车线,其上方的停车线为远端停车线,人工标定近端停车线的长度为ls,人工标定远端停车线的长度为le,近端停车线的一端点的横坐标为xs1,其纵坐标为ys1,近端停车线的另一端点的横坐标为xs2,其纵坐标为ys2,远端停车线的一端点的横坐标为xe1,其纵坐标为ye1,远端停车线的另一端点的横坐标为xe2,其纵坐标为ye2,近端停车线的中点横坐标为xs,其纵坐标为ys,远端停车线的中点横坐标为xe,其纵坐标为ye;
16、(d-2)通过公式计算得到中点之间的像素距离lse;
17、(d-3)以四个点(xs1,ys1)、(xs2,ys2)、(xe1,ye1)、(xe2,ye2)连线建立所需车道四边形区域,使用向量叉乘算法判断机动车目标检测框的中点是否在所需车道四边形区域中,如果不在所需车道四边形区域中,将该机动车目标检测框丢弃。
18、进一步的,步骤(e)包括如下步骤:
19、(e-1)通过公式计算得到系数kα,通过公式计算得到系数bα。
20、进一步的,步骤(f)包括如下步骤:
21、(f-1)通过公式x_headj=xj计算得到第j个机动车的目标检测框中的机动车车头的横坐标x_headj,通过公式计算得到第j个机动车的目标检测框中的机动车车头的纵坐标y_headj;
22、(f-2)通过公式计算得到第j个机动车的目标检测框中的机动车车尾的横坐标x_tailj,通过公式y_tailj=yj计算得到第j个机动车的目标检测框中的机动车车尾的纵坐标y_tailj;
23、(f-3)通过公式
24、
25、计算得到第j个机动车的目标检测框中的机动车预计通过近端停车线的横坐标x_stoplinej,通过公式
26、
27、计算得到第j个机动车的目标检测框中的机动车预计通过近端停车线的纵坐标y_stoplinej;
28、(f-4)通过公式
29、计算得到第j个机动车的目标检测框中的机动车的车头与近端停车线的距离distancej;
30、(f-5)通过公式
31、计算得到第j个机动车的目标检测框中的机动车的长度car_lengthj;
32、(f-6)如果剪裁后的第i帧路口道路图像x′i中第j个机动车的目标检测框中的机动车的车头与近端停车线的距离distancej在距离阈值δdistance的取值范围内且第j个机动车的目标检测框中的机动车的长度car_lengthj在长度阈值δdistance的取值范围内,则第j个机动车的目标检测框中的机动车的静止时间stop_timej等于第i-1帧路口道路图像x′i-1中第j个机动车的目标检测框中的机动车的静止时间加1秒,第1帧路口道路图像x′1中第j个机动车的目标检测框中的机动车的静止时间取值为0,如果剪裁后的第i帧路口道路图像x′i中第j个机动车的目标检测框中的机动车的车头与近端停车线的距离distancej不在距离阈值δdistance的取值范围内且第j个机动车的目标检测框中的机动车的长度car_lengthj不在长度阈值δdistance的取值范围内,则第j个机动车的目标检测框中的机动车的静止时间stop_timej=0。
33、优选的,步骤(f-6)中距离阈值δdistance∈[0.3,1]米,长度阈值δdistance∈[0.1,0.5]米。
34、优选的,步骤(g)中d取值为10米或15米或20米。
35、进一步的,步骤(g)包括如下步骤:
36、(g-1)将剪裁后的第i帧路口道路图像x′i划分为个区域;
37、(g-2)遍历车辆信息列表car_listi,如果第k个区域中有车则该区域的车辆个数的计数加1;
38、(g-3)如果第k个区域的则剪裁后的第i帧路口道路图像x′i的第k个区域内有车时间等于第i-1帧路口道路图像x′i-1的第k个区域内有车时间加1秒,第1帧路口道路图像x′1中有车时间的取值为0;
39、(g-4)通过公式建立剪裁后的第i帧路口道路图像x′i中划分的第k个区域的车辆分布信息ηk。
40、进一步的,步骤(h)包括如下步骤:
41、(h-1)遍历车辆分布列表car_distributioni,如果第k个区域的车辆分布信息ηk的第k个区域内有车时间大于设定时间阈值δqueue_time,则剪裁后的第i帧路口道路图像x′i的排队区间长度queue_area的值加d,设定时间阈值δqueue_time∈[1,3]秒;
42、(h-2)遍历车辆信息列表car_listi,如果位置信息car_inforj中第j个机动车的目标检测框中的机动车的静止时间stop_timej大于静止时间阈值δstop_time且第j个机动车的目标检测框中的机动车的车头与近端停车线的距离distancej大于排队区间长度queue_area,则判定第j个机动车为违停车辆,静止时间阈值δstop_time∈[5,10]秒;
43、(h-3)遍历车辆信息列表car_listi中所有违停车辆,如果第j个违停车辆的distancej+car_lengthj的值小于等于排队区间长度queue_area则记录distancej+car_lengthj值为有效值,将所有违停车辆的有效值中的最大值记为排队长度l;
44、(h-4)遍历车辆信息列表car_listi中所有违停车辆个数,将所有违停车辆记为区域内运动车辆数量n;
45、(h-5)遍历车辆信息列表car_listi中所有非违停车辆,如果所有非违停车辆中第j个机动车的目标检测框中的机动车的车头与近端停车线的距离distancej的值最大,则max_distancei=distancej,通过公式计算得到第j个机动车的行驶速度v,max_distancei-1为剪裁后的第i-1帧路口道路图像x′i-1中对应的第j个机动车的目标检测框中的机动车的车头与近端停车线的距离,δt为第i帧与第i-1帧的间隔时间,通过公式计算得到距近端停车线最远车辆的预计通过时间t。
46、本发明的有益效果是:通过路口实时监控画面,之后获取各个方向机动车排队长度、机动车数量以及区域内最远车辆行驶速度三个参数,并智能检测违规停车车辆,综合分析路口过车情况。利用获得的机动车数量参数可以判断目标方向是否存在“绿灯无车”现象,若存在上述现象,策略程序下发跳转信号机相位指令,跳过当前绿灯状态。排队长度参数可以评估车道的拥堵状况,为当前路口的绿灯放行配时调整提供依据。区域内最远车辆行驶速度参数可以评估策略程序下发跳转信号机相位指令的延迟时间,尽量保证区域内所有车辆都通行完毕时信号机再跳转至下一相位。
本文地址:https://www.jishuxx.com/zhuanli/20240731/186921.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表