车路协同场景下基于车流量预测的无回程依赖感知任务卸载方法及系统
- 国知局
- 2024-07-31 20:33:52
本发明涉及一种车路协同场景下基于车流量预测的无回程依赖感知任务卸载方法及系统,属于边缘计算中车路协同调度领域。
背景技术:
1、近年来,随着物联网技术的快速发展,人们对于智能交通的需求不断增加,解决计算密集型和延迟敏感型汽车应用的需求已经成为一项艰巨的挑战。在车联网的发展过程中,车辆边缘计算(vehicle edge computing,vec)作为一种先进的范例,受到了广泛的关注。vec是一种将计算、存储和网络功能推向车辆边缘的计算模式,它利用车载设备、传感器和移动网络等技术,将边缘计算资源集成到车辆中,从而实现车辆信息的实时处理和分析。与传统的云计算模式相比,车辆边缘计算具有更低的延迟和更高的安全性,能够更好地满足车辆智能化领域的需求。vec技术的出现,有效地解决了传统中心化计算模式下,数据处理速度慢、带宽瓶颈等问题,同时也为车联网的发展提供了新的技术支持。任务卸载是vec中的一个重要问题,已经引起了研究者的广泛关注。现有的工作大多是针对资源有限的车辆进行任务卸载和资源分配,通过将计算密集型和延迟敏感型任务卸载到配备边缘服务器的路边计算单元(roadside units,rsu),为车辆提供更好的服务质量。
2、由于车辆的高速移动性,车辆会在不同的边缘服务器覆盖范围中移动,因此服务迁移和卸载是vec相关研究的一个关键课题。具体来说,当车辆行驶于不同的区域时,需要将正在进行的计算服务迁移到正在动态连接的边缘服务器上,以保证不间断的计算服务。大部分研究工作都作出了以下两个假设:1、所有的基站都需要部署回程,2、车联网应用由独立的任务组成。这存在如下问题:首先,为所有基站部署回程将产生巨大的基础设施成本,特别是在密集部署基站以增加网络容量并为车辆提供无处不在的服务密集的vec网络中。其次,在实践中,任务间依赖关系存在于大多数车联网应用中,其中一些子任务的输出是其他子任务的输入,任务间的依赖关系是复杂的。这是两个待解决的问题,同时,传统的服务迁移方法一般只关注是否迁移,而忽略了迁移多少的问题。这主要是因为它们忽略了任务间的依赖关系,使得无法为迁移的中间结果提供显式的数学描述。因此,在任务依赖模型下实现不依赖回程的服务迁移和卸载是一个迫切需要关注的问题。
技术实现思路
1、发明目的:本发明提出一种车路协同场景下基于车流量预测的无回程依赖感知任务卸载方法及系统,旨在解决因为车辆的高移动性带来的频繁迁移服务的问题,通过设计一种依赖感知的无回程迁移方案,使服务迁移不依赖于具有任务依赖约束的回程。
2、技术方案:为了实现以上发明目的,本发明的技术方案如下:
3、一种车路协同场景下基于车流量预测的无回程依赖感知任务卸载方法,包括以下步骤:
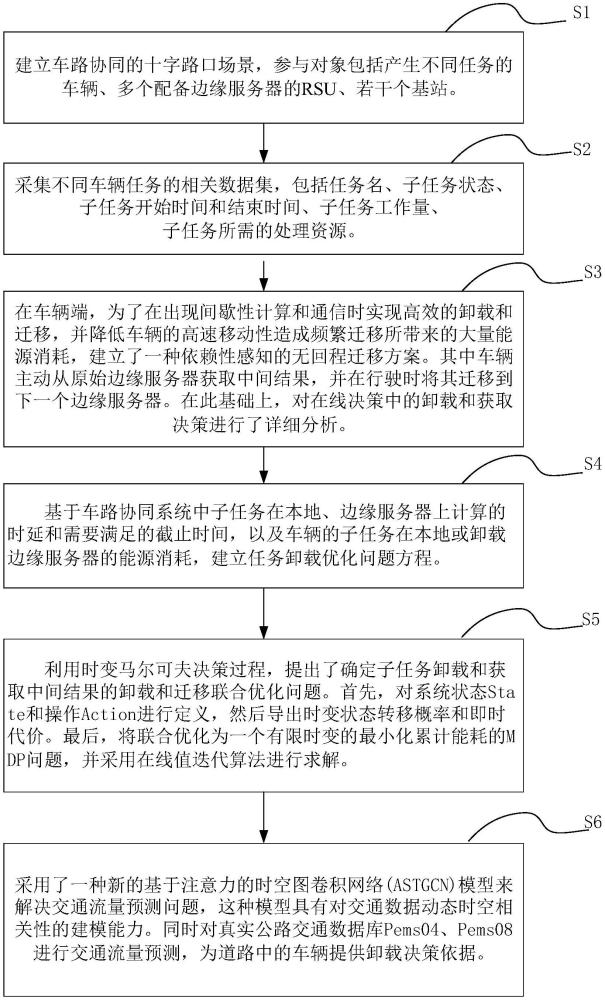
4、s1、建立车路协同的场景模型,包括十字路口场景与普通道路场景,每种场景下车路协同的参与对象包括:道路内移动的产生任务的车辆、多个配备边缘服务器的路侧单元rsu、若干个基站;
5、s2、采集不同车辆任务的相关数据集,包括:任务名、子任务状态、子任务所需的处理资源,其中任务名能够表示子任务之间的依赖关系;采集交通流量数据集,包括若干道路分布不同的探测器获取的车辆数量、速度;
6、s3、根据交通流量数据集,利用基于注意力的时空图卷积网络astgcn模型预测车辆在未来位置处的车流量;
7、s4、建立车辆端依赖性感知的无回程迁移方案,在该迁移方案中车辆主动从原始边缘服务器获取中间结果,并在行驶时将其迁移到下一个边缘服务器;
8、s5、根据车辆任务的相关数据集,基于子任务在车辆本地、边缘服务器上计算的时延和需要满足的截止时间,以最小化子任务在车辆本地执行或卸载到边缘服务器执行的能源消耗为目标建立车辆的子任务卸载决策;
9、s5、利用时变马尔可夫决策过程,建立确定子任务卸载和获取中间结果的卸载和迁移联合优化问题,首先,对系统状态和操作进行定义,状态空间表示为:s=φ×m×k,其中,φ={1,2,...,r}×{1,2,...,r}为车辆在最近两个时隙连接的边缘服务器集合,m={1,2,...,m}是要卸载的子任务集合,k={0,1,2,...,m}是最近获取到的子任务的集合,状态空间中有若干个状态s,表示为st=((rt,rt-1),mt,kt),rt表示当前时隙t车辆所在边缘服务器号,rt-1表示上一时隙t-1车辆所在边缘服务器号,m代表可卸载的子任务序号,k代表需要获取中间结果的子任务序号;在状态s可采取的行动表示为:a={0,1,2,3},其中,a=0表示待机,a=1表示卸载子任务,a=2表示卸载子任务且获取中间结果,a=3表示不卸载,本地执行;在车辆做出卸载决策之前,会向边缘服务器获取预测的车流量,如果边缘服务器覆盖区域内的任务数量超出服务器计算能力,则车辆选择本地执行自己的任务;然后导出时变状态转移概率和即时消耗,最后,联合优化为一个有限时变的最小化累计能耗的mdp问题,并采用值迭代算法进行求解。
10、进一步地,十字路口环境为:十字路口区域内分布若干个基站、边缘服务器,分别记为b={1,2,3,......,|b|},r={1,2,3,......,|r|},普通路口环境为:若干个边缘服务器均匀放置在路边;v={1,...,|v|}表示道路内移动的车辆;
11、每台车辆都携带一定数量的任务,表示为每个任务有输入数据输出数据最后期限约束每个任务分成m个子任务,表示为:每个子任务有输入数据输出数据子任务τm的大小为系统分为t个时隙,t={1,2,3,...,t},yn,m∈{0,1}表示子任务τm在本地执行或卸载到边缘服务器执行的指示变量,表示所有子任务的最晚截止时间;标识子任务的依赖性的有向无环图dag表示为ga(m,l),l={(i,j)|i,j∈τ,i→j},m表示子任务的集合,l表示子任务之间的边的集合,i→j表示子任务τj在子任务τi完成之后执行,即子任务τi的输出为子任务τj的输入。
12、进一步地,[1,2,...,m]为卸载优先级,为运行到子任务m时获得的中间结果,表示为:
13、
14、其中,oi为每个子任务的输出大小,succ(τi)为任务拓扑图中根据τi的输出包含所有后续子任务的集合,当()内为真时,i(·)=1,否则为0。
15、进一步地,车辆的子任务在本地执行或卸载到边缘服务器的能源消耗计算方程如下:
16、
17、其中,表示在状态s采取动作a时的能源消耗,pu表示车辆的发射功率,pr表示车辆的接收功率,t0表示时隙t的长度,为子任务的迁移时间,为子任务的卸载时间,为子任务卸载到边缘服务器执行所等待的时间,为子任务主动获取中间计算结果的时间;
18、当车辆选择在本地计算子任务时,即a=3,车辆计算消耗为表示为:
19、
20、其中,λ为能源效率系数,fn,m为车辆计算任务频率;
21、则任务卸载问题优化方程为:
22、
23、其中e*表示在状态s采取最佳动作时带来的最小能源消耗。
24、进一步地,子任务的迁移时间为:
25、
26、其中,表示执行到子任务τ(k)需要迁移到边缘服务器的中间结果,表示预计算的迁移操作是否超时;
27、子任务的卸载时间为:
28、
29、子任务卸载到边缘服务器执行所等待的时间为:
30、
31、其中,是需要卸载的子任务大小,cr是服务器r的计算速率;
32、子任务主动获取中间计算结果的时间为:
33、
34、其中,rates,r(t)是上行数据传输速率,表示为:
35、ratev,r(t)=bv,r(t)·log2(1+snrv,r(t))
36、rater,s(t)是下行数据传输速率,表示为:
37、rater,v(t)=bv,r(t)·log2(1+snrv,r(t))
38、bv,r(t)为车辆与边缘服务器带宽;
39、snrv,r(t)表示信噪比,表示为:
40、
41、其中,pv,r(t)为发射功率,gv,r(t)为信道增益,εv,r(t)为路径损耗,δv,r(t)2为高斯白噪声的功率,bv,r(t)为车辆与边缘服务器带宽,dv,r(t)为车辆与最近边缘服务器距离,表示为:
42、
43、其中,分别为车辆v的横纵坐标,分别为边缘服务器r的横纵坐标,hr,hv分别为边缘服务器,车辆的天线高度。
44、进一步地,时变马尔可夫决策过程中状态转移概率公式表示为:
45、pt(s'|s,a)=pt(r'|s,a)·pt(k'|r',s,a)·pt(m'|r',k',s,a)
46、其中,pt(r'|s,a)为边缘服务器转移概率,随车辆到边缘服务器r'的距离变化,距离越近转移概率越大;
47、k'表示下一个时隙k可能的值,pt(k'|r',s,a)为最新获取子任务转移概率,表示为:
48、
49、其中表示获取中间结果操作是否超过任务截止时间;表示执行子任务的整个过程,为子任务的迁移时间,为子任务的卸载时间,为子任务卸载到边缘服务器执行所等待的时间,为子任务主动获取中间计算结果的时间;
50、pt(m'|r',k',s,a)为卸载任务转移概率:
51、
52、其中
53、进一步地,astgcn主要由三个独立的分量组成,分别模拟交通流的三种时间属性,即近期、日周期和周周期依赖关系,其中,假设采样频率为每天q次,假设当前时间为0,预测窗口大小为tp,沿时间轴截取长度为th、td和tw的三个时间序列片段,分别作为近期分量、日周期分量和周周期分量的输入,三个时间序列片段的详细情况如下:
54、最近的片段:
55、
56、日周期段:
57、
58、周周期段:
59、
60、最终的预测结果:
61、
62、其中,wh,wd,ww为学习参数。为哈达玛积。
63、一种车路协同场景下基于车流量预测的无回程依赖感知任务卸载装置,包括:
64、车路协同场景构建模块,被配置为建立车路协同的场景模型,包括十字路口场景与普通道路场景,每种场景下车路协同的参与对象包括:道路内移动的产生任务的车辆、多个配备边缘服务器的路侧单元rsu、若干个基站;
65、数据采集模块,被配置为采集不同车辆任务的相关数据集,包括:任务名、子任务状态、子任务所需的处理资源,其中任务名能够表示子任务之间的依赖关系;采集交通流量数据集,包括若干道路分布不同的探测器获取的车辆数量、速度;
66、车流量预测模块,被配置为根据交通流量数据集,利用基于注意力的时空图卷积网络astgcn模型预测车辆在未来位置处的车流量;
67、服务迁移方案构建模块,被配置为建立车辆端依赖性感知的无回程迁移方案,在该迁移方案中车辆主动从原始边缘服务器获取中间结果,并在行驶时将其迁移到下一个边缘服务器;
68、卸载决策模型构建模块,被配置为根据车辆任务的相关数据集,基于子任务在车辆本地、边缘服务器上计算的时延和需要满足的截止时间,以最小化子任务在车辆本地执行或卸载到边缘服务器执行的能源消耗为目标建立车辆的子任务卸载决策;
69、联合优化问题求解模块,被配置为利用时变马尔可夫决策过程,建立确定子任务卸载和获取中间结果的卸载和迁移联合优化问题,首先,对系统状态和操作进行定义,状态空间表示为:s=φ×m×k,其中,φ={1,2,...,r}×{1,2,...,r}为车辆在最近两个时隙连接的边缘服务器集合,m={1,2,...,m}是要卸载的子任务集合,k={0,1,2,...,m}是最近获取到的子任务的集合,状态空间中有若干个状态s,表示为st=((rt,rt-1),mt,kt),rt表示当前时隙t车辆所在边缘服务器号,rt-1表示上一时隙t-1车辆所在边缘服务器号,m代表可卸载的子任务序号,k代表需要获取中间结果的子任务序号;在状态s可采取的行动表示为:a={0,1,2,3},其中,a=0表示待机,a=1表示卸载子任务,a=2表示卸载子任务且获取中间结果,a=3表示不卸载,本地执行;在车辆做出卸载决策之前,会向边缘服务器获取预测的车流量,如果边缘服务器覆盖区域内的任务数量超出服务器计算能力,则车辆选择本地执行自己的任务;然后导出时变状态转移概率和即时消耗,最后,联合优化为一个有限时变的最小化累计能耗的mdp问题,并采用值迭代算法进行求解。
70、本发明还提供一种计算机设备,包括:一个或多个处理器;存储器;以及一个或多个程序,其中所述一个或多个程序被存储在所述存储器中,并且被配置为由所述一个或多个处理器执行,所述程序被处理器执行时实现如上所述的车路协同场景下基于车流量预测的无回程依赖感知任务卸载方法的步骤。
71、本发明还提供一种车辆边缘计算系统,包括:移动车辆、多个路侧单元rsu、基站,配备边缘服务器的rsu在道路两侧分布,并通过局域网与车辆进行通信,rsu之间采用无线网络与基站进行通信,用于获取执行任务所需的软件,车辆产生的任务根据如上所述的车路协同场景下基于车流量预测的无回程依赖感知任务卸载方法进行卸载决策,以决定子任务是在本地处理或卸载到rsu来处理。
72、有益效果:本发明设计了一种依赖感知的无回程迁移方案,车辆根据任务依赖关系从原始服务器主动获取迁移结果,并沿着行进路径将结果迁移到其动态连接的服务器,使服务迁移不依赖于具有任务依赖约束的回程。考虑到车辆移动带来的间歇性通信和计算,采用时变马尔可夫决策过程(mdp),以最小化总能耗为目标,提出了一种确定任务卸载时间和获取结果的联合卸载与迁移优化问题。在mdp框架的基础上,提出了一种高效的值迭代算法。同时,在边缘服务器端,提出了一种新的基于注意力的时空图卷积网络(astgcn)模型来解决交通流预测问题,为车辆的卸载决策提供依据。本发明能够最小化所有车辆总能耗,并且支持不同异构车辆配备独立的值迭代算法,实现方法的大规模拓展应用。
本文地址:https://www.jishuxx.com/zhuanli/20240731/186905.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表