基于车路云一体化的自动驾驶决策规划架构
- 国知局
- 2024-07-31 20:35:47
本申请涉及自动驾驶,特别涉及一种基于车路云一体化的自动驾驶决策规划架构。
背景技术:
1、随着车路云一体化技术的持续进步,新一代信息通信技术将车辆、道路与云端的物理与信息空间无缝连接,使得道路环境的全息信息获取更为便捷。路侧设备与智能网联汽车共同协作,实时感知并上传数据至云端,再结合高精地图信息,实现对当前交通环境的全面精准认知。这种协同感知、决策与控制的方式,极大地推动了智能网联汽车交通系统向安全、节能、舒适、高效的方向发展。
2、尽管现有技术中车路云一体化技术在提升感知能力方面已得到广泛应用,比如前方危险预警、道路施工提示等功能的有效实施。然而,如何进一步挖掘云计算的潜力,通过车路云一体化技术有效分担车辆的计算负荷,减轻自车的算力负担,仍是当前面临的挑战。
技术实现思路
1、本申请提供一种基于车路云一体化的自动驾驶决策规划架构,以解决目前车路云一体化架构的车端计算严重依赖云端计算,从而威胁驾驶安全以及车云算力分配不合理等问题。
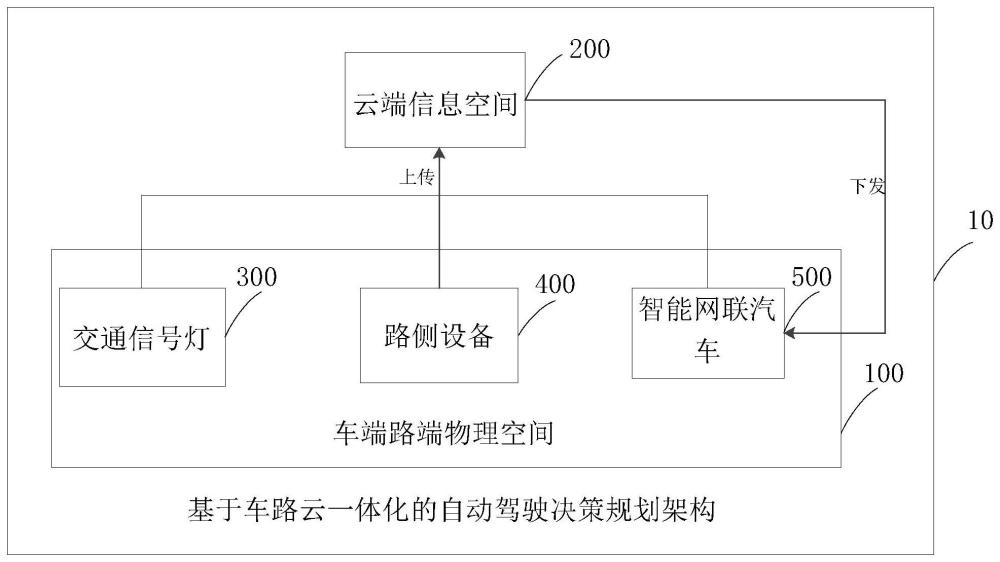
2、本申请实施例提供一种基于车路云一体化的自动驾驶决策规划架构,包括车端路端物理空间和云端信息空间,其中,车端路端物理空间包括交通信号灯、路侧设备和智能网联汽车,交通信号灯上传相位信息至云端信息空间,路侧设备上传路端感知信息至云端信息空间,智能网联汽车上传车端感知信息至云端信息空间;云端信息空间基于路端感知信息和车端感知信息进行障碍物关联,基于关联得到的目标障碍物的历史轨迹信息预测未来轨迹信息,根据未来轨迹信息搜索智能网联汽车的未来驾驶行为序列,并下发未来驾驶行为序列至智能网联汽车;若智能网联汽车与云端信息空间通信正常,智能网联汽车在收到未来驾驶行为序列后,基于未来驾驶行为序列进行自动驾驶决策规划;若智能网联汽车与云端信息空间通信中断,智能网联汽车基于车端感知信息进行自动驾驶决策规划。
3、可选地,路端感知信息包括第一障碍物的绝对位置、速度、航向角、障碍物id(identifier,标识符),车端感知信息包括第二障碍物的绝对位置、速度、航向角、障碍物id。
4、可选地,云端信息空间还用于:从路端感知信息任意选取第一障碍物和车端感知信息选取第二障碍物,基于第一障碍物和第二障碍物组成障碍物对;对于障碍物对,根据第一障碍物的绝对位置和第二障碍物的绝对位置计算障碍物之间的第一距离,根据第一障碍物的速度和第二障碍物的速度计算速度差值,根据第一障碍物的航向角和第二障碍物的航向角计算航向角差值,根据障碍物之间的距离、速度差值和航向角差值计算障碍物之间的第二距离;基于第二距离确定所有的障碍物对,并采用最近邻算法从所有障碍物对中,为每个路侧传感器检测到的障碍物匹配车辆传感器检测到的障碍物中距离最近的一个目标障碍物。
5、可选地,目标障碍物的位置速度航向角计算方式如下:
6、
7、
8、
9、
10、其中,ρr代表路侧设备感知权重,ρv代表车端感知权重,θi代表路端感知到的障碍物i的航向角,θj代表车端感知到的障碍物j的航向角,vi代表路端感知到的障碍物i的速度,vj代表车端感知到的障碍物j的速度,xi代表路端感知到的障碍物i的横向坐标位置,xj代表车端感知到的障碍物j的横向坐标位置,yi代表路端感知到的障碍物i的纵向坐标位置,yj代表车端感知到的障碍物j的纵向坐标位置,代表障碍物的修正纵向坐标位置,代表障碍物的修正横向坐标位置,代表障碍物的速度,代表障碍物的航向角。
11、可选地,云端信息空间还用于:基于未来轨迹信息形成三维时空投影,其中,三维时空投影包括未来任意时刻智能网联汽车的绝对位置、速度以及航向角;根据三维时空投影搜索最优的驾驶行为序列,将最优的驾驶行为序列作为云端对于车端建议的未来驾驶行为序列。
12、可选地,智能网联汽车还用于:依次遍历未来驾驶行为序列中的每一个行为,搜索与前一个行为不同的目标行为对,并记录目标行为对的对应的时间;根据目标行为对和目标行为对的对应的时间构建至少一个换道关键点,并根据至少一个换道关键点生成换道轨迹。
13、可选地,智能网联汽车还用于:根据车端的时间信息搜索未来驾驶行为序列中距离最近的行为ac;以ac为基准向后取个行为组成长度为的短时域的建议行为as,若长度小于则取ac到a的最后一个行为组成行为as;根据行为ac和行为as组成目标行为对。
14、可选地,换道轨迹的为五次多项式换道轨迹,其中,五次多项式换道轨迹的计算公式如下:
15、p(t)=α0+α1t+α2t2+a3t3+a4t4+a5t5,
16、其中,α0~α5为五次多项式的系数,t代表换道时间。
17、可选地,智能网联汽车包括车端求解器,其中,车端求解器通过反向推导换道轨迹得到自车未来时刻内的最终优化轨迹,若车端求解器无法成功推导最终优化轨迹,则由智能网联汽车触发云端信息空间重新计算未来驾驶行为序列。
18、可选地,智能网联汽车还包括横向pid(proportional-integral-derivative,比例、积分、微分)控制器以及纵向pid控制器,基于横向pid控制器以及纵向pid控制器跟踪求解的最终优化轨迹,计算出当前时间下对应的控制量,基于控制量对智能网联汽车进行横纵向控制。
19、由此,本申请包括如下有益效果:
20、本申请实施例中路侧设备与网联汽车实时上传感知信息至云端,云端综合处理信息,提供全局动态信息,并结合高精地图预测障碍物轨迹,为决策规划模块提供精准的预测数据。云端进一步搜索驾驶空间,生成推荐驾驶行为序列与安全空间,并定期发送至网联汽车。网联汽车接收信息后,更合理地进行自动驾驶决策规划,显著提升求解速度并优化轨迹质量。本实施例通过独特的时间触发机制,确保云端在独立线程中以较低频率循环求解长时域安全驾驶空间及自车推荐行为序列,而车端则根据云端计算结果,在独立线程中求解短时域的规划轨迹,保证了车云各自的独立性及计算效率。由此,解决了目前车路云一体化架构的车端计算严重依赖云端计算,从而威胁驾驶安全以及车云算力分配不合理等技术问题。
21、本申请附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本申请的实践了解到。
技术特征:1.一种基于车路云一体化的自动驾驶决策规划架构,其特征在于,包括车端路端物理空间和云端信息空间,其中,
2.根据权利要求1所述的基于车路云一体化的自动驾驶决策规划架构,其特征在于,所述路端感知信息包括第一障碍物的绝对位置、速度、航向角、障碍物id,所述车端感知信息包括第二障碍物的绝对位置、速度、航向角、障碍物id。
3.根据权利要求2所述的基于车路云一体化的自动驾驶决策规划架构,其特征在于,所述云端信息空间还用于:
4.根据权利要求3所述的基于车路云一体化的自动驾驶决策规划架构,其特征在于,所述目标障碍物的位置速度航向角计算方式如下:
5.根据权利要求1所述的基于车路云一体化的自动驾驶决策规划架构,其特征在于,所述云端信息空间还用于:
6.根据权利要求1所述的基于车路云一体化的自动驾驶决策规划架构,其特征在于,所述智能网联汽车还用于:
7.根据权利要求6所述的基于车路云一体化的自动驾驶决策规划架构,其特征在于,所述智能网联汽车还用于:
8.根据权利要求6所述的基于车路云一体化的自动驾驶决策规划架构,其特征在于,所述换道轨迹为五次多项式换道轨迹,其中,所述五次多项式换道轨迹的计算公式如下:
9.根据权利要求1所述的基于车路云一体化的自动驾驶决策规划架构,其特征在于,所述智能网联汽车包括车端求解器,其中,所述车端求解器通过反向推导所述换道轨迹得到自车未来时刻内的最终优化轨迹,若所述车端求解器无法成功推导最终优化轨迹,则由所述智能网联汽车触发所述云端信息空间重新计算所述未来驾驶行为序列。
10.根据权利要求9所述的基于车路云一体化的自动驾驶决策规划架构,其特征在于,所述智能网联汽车还包括横向pid控制器以及纵向pid控制器,基于所述横向pid控制器以及纵向pid控制器跟踪求解的最终优化轨迹,计算出当前时间下对应的控制量,基于所述控制量对所述智能网联汽车进行横纵向控制。
技术总结本申请涉及自动驾驶技术领域,特别涉及一种基于车路云一体化的自动驾驶决策规划架构,包括车端路端物理空间和云端信息空间,其中,车端路端物理空间包括交通信号灯、路侧设备和智能网联汽车,它们将感知信息上传至云端信息空间;云端信息空间基于感知信息进行障碍物关联,从而预测未来轨迹信息,搜索智能网联汽车的未来驾驶行为序列,并下发至智能网联汽车;若智能网联汽车与云端信息空间通信正常,智能网联汽车在收到未来驾驶行为序列后,进行自动驾驶决策规划;若通信中断,智能网联汽车基于车端感知信息进行自动驾驶决策规划。由此,解决了目前车路云一体化架构的车端计算严重依赖云端计算,从而威胁驾驶安全以及车云算力分配不合理等问题。技术研发人员:高博麟,韩硕,罗禹贡,周光,崔艳受保护的技术使用者:清华大学技术研发日:技术公布日:2024/6/2本文地址:https://www.jishuxx.com/zhuanli/20240731/187033.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表