一种落水检测方法及系统与流程
- 国知局
- 2024-07-31 20:41:16
本发明属于落水检测,尤其涉及一种落水检测方法及系统。
背景技术:
1、在海洋和河流航运行业,船只工作人员常常在极具挑战和变化的环境中工作。这些环境包括滑动的甲板、动荡的海浪、极端天气条件以及长时间的劳累。这些因素极大增加了工作人员在执行日常任务时失足落水的风险。一旦发生落水事件,迅速的救援至关重要,因为海洋环境中的寒冷水温和强流可以迅速导致体力耗尽和低温症,从而危及生命。
2、有效的落水检测和报警系统显得尤为重要。目前的跌落检测系统均是基于三轴数字加速度计的检测系统,在动态的海上环境中,受到甲板晃动以及人为跳跃活动等因素的影响,很容易触发系统进而出现误报,如此不仅存在救援延误的风险,且降低了检测系统检测的可靠性。
3、基于上述分析,设计一种检测可靠性高的落水检测方法及系统尤为重要。
技术实现思路
1、本发明的目的是提供一种落水检测方法及系统,以解决现有落水检测方法及系统可靠性低的问题。
2、为了解决上述问题,本发明提供了一种落水检测方法:包含以下步骤:
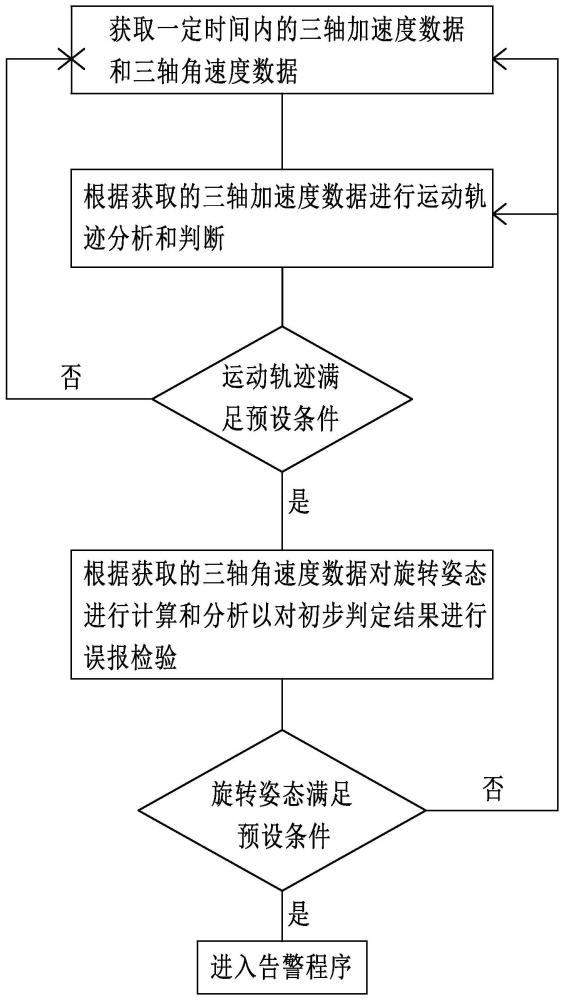
3、步骤1:获取一定时间内的三轴加速度数据和三轴角速度数据;
4、步骤2:根据获取的三轴加速度数据进行运动轨迹分析和判断,当运动轨迹满足预设条件后,则初步判定落水并执行下一步,否则,执行步骤1;
5、步骤3:根据获取的三轴角速度数据对旋转姿态进行计算和分析以对初步判定结果进行误报检验,当旋转姿态满足预设状态时,则初步判定成立,进入告警程序,否则,继续执行步骤1和步骤2。
6、作为本技术的优选方案,在步骤1中,所述一定时间具体为两倍的自由落体时间t,其中,自由落体时间t的计算公式具体为:
7、
8、其中,h为预设的高度阈值,g为重力加速度。
9、作为本技术的优选方案,在步骤2中,根据获取的三轴加速度数据进行运动轨迹分析和判断的具体步骤包含:
10、步骤21:根据加速度计的采样频率计算采样样本总数n,具体计算公式为:
11、n=2t*sf
12、其中,t为自由落体时间,sf为加速度计的采样频率;
13、步骤22:计算每个采样样本的加速度范数mag,并将其依次保存于数组mag[]中,通过滤波算法对该组所述数组mag[]进行坏值滤波直至满足预设条件时进入落水监测程序;
14、步骤23:采用滑动窗口算法和/或遍历方法获取该组所述数组mag[]中的多个特征数据,并将该特征数据与对应的预设参数比较进而判断是否先后经历了自由落体状态、撞击状态和静止状态。
15、作为本技术的优选方案,在步骤23中具体包含以下流程:
16、步骤231:获取该组所述数组mag[]中的特征数据,该特征数据至少包含范数平均数avg_mag,最小值min_mag和极差diff_max_min;
17、步骤232:自由落体状态判断,将最小值min_mag与预设自由落体阈值比较,若最小值min_mag小于所述预设自由落体阈值,则判定该组数组中的数据经历了自由落体状态,进入下一步,否则,继续检测下一组数据;
18、步骤233:撞击状态判断,将极差diff_max_min与预设撞击阈值进行比较,若极差diff_max_min大于所述预设撞击阈值,则判定该组数组中的数据经历了撞击状态,进入下一步,否则,继续检测下一组数据;
19、步骤234:静止状态判断,将极差diff_max_min和范数平均数avg_mag分别与预设静止阈值进行比较,若两者均小于静止阈值,则判定该组数组中的数据经历了静止状态,初步判定落水,并进入误报检验程序。
20、作为本技术的优选方案,当滑动窗口算法中窗口大小阈值等于数组长度时,滑动窗口算法和遍历方法择其一选择。
21、作为本技术的优选方案,在步骤s3中,将获取的三轴角速度数据通过四元数转换处理获取动态动态欧拉角进而确定旋转姿态,或,将获取的三轴角速度通过四元数转换并采用三角函数方式获取旋转姿态。
22、作为本技术的优选方案,所述通过四元数转换处理获取动态欧拉角的具体方法包含:
23、将获取的三轴角速度向量g=[gx,gy,gz]进行单位化,得到单位化的角速度矢量gx/|g|,gy/|g|,gz/|g|;
24、定义初始状态的四元数q=[1,0,0,0],即旋转角为零;
25、确定增量角度θ==|g|*dt;
26、将增量角度转换为四元数增量,也即创建一个四元数组,
27、q_inc=[cos(θcos((gx/|g|)*sin(θin(θ(gy/|g|)*sin(θin(θ(gz/|g|)*sin(θin(θ;
28、将初始状态的四元数q与增量四元数q_inc相乘,得到更新后的四元数q_new=q*q_inc;
29、对更新后的四元数进行归一化,得到最新的初始状态四元数q_norm=[w,x,y,z];
30、利用最新的初始状态四元数q_norm计算动态欧拉角,
31、roll=atan2(2*(w*x+y*z),1-2*(x^2+y^2))
32、pitch=asin(2*(w*y-z*x))
33、yaw=atan2(2*(w*z+x*y),1-2*(y^2+z^2))。
34、作为本技术的优选方案,所述通过四元数转换并采用三角函数方式获取旋转角度的方法包含:计算获取两个连续帧的四元数,记录前一帧的四元数为q1和当前帧的四元数q2,通过计算四元数之间的角度β来反应旋转姿态。
35、作为本技术的优选方案,在步骤1之前,需要设定预设参数,该预设参数至少包含高度阈值、窗口大小阈值、自由落体阈值、撞击阈值及静止阈值。
36、为了解决上述问题,本技术还提供了一种落水检测系统,包含加速度传感器、角速度传感器和控制单元,该系统执行上述任一项所述的落水检测方法。
37、与现有技术相比,本技术中该落水检测方法及系统的优势在于:本技术该检测方法以加速度数据作为人体或物体运动轨迹检测的依据,利用该加速度数据判断人体或物体的运动轨迹是否依次经历了自由落体、撞击和静止三个状态,如是,再辅以角速度数据进行跌落误报检验,通过角速度数据获取旋转角度以判断人体或物体在跌落过程中的姿态变化,进而判断是否处于翻滚或侧翻等状态,如是,则说明发生跌落事件,也即,在本技术中,运动轨迹是跌落状态判定的基础,运动姿态是跌落状态判定的验证,两者相互配合能够对跌落状态进行精准、可靠判定;该方法能够区分正常运动和潜在的跌落事件,提高了检测的准确性和可靠性,尤其是在动态的海上环境中,采用加速度数据为主的运动轨迹检测,辅以角速度的姿态检测方法能够对跌落事件进行精准、可靠的判断,有效应对由于船只晃动、强风和高浪等因素引起的误报现象,确保在真正发生跌落时能够及时触发告警,从而提高船员的安全性和救援效率。
本文地址:https://www.jishuxx.com/zhuanli/20240731/187419.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表