一种基于多传感器融合的海上航标碰撞智能监测系统的制作方法
- 国知局
- 2024-07-31 20:41:26
本发明属于航标监测,具体为一种基于多传感器融合的海上航标碰撞智能监测系统。
背景技术:
1、海上航标是指在海上设置的用于引导海上船舶航行、标示航道、警示障碍物等的设施。它们通常位于河流、湖泊、海洋等水域,并起到了航行安全和交通管理的重要作用。海上航标的种类多样,常见的包括以下几种:灯塔:灯塔是海上航标中最为著名和常见的一种。它们通常位于陆地或岛屿上,用来向船只发出光信号,以引导海上船舶航行和标示岩礁、浅滩等危险区域。灯塔的灯光可以根据需要设置不同的闪烁频率和颜色。浮标:浮标是一种浮在水面上的标志物,可以分为救生浮标和导航浮标两种类型。救生浮标通常用于标示救生设施的位置,如救生圈、救生艇等。导航浮标则用于标示航道的位置和方向,以供船只导航。标杆:标杆是一种垂直于水面的高杆,通常用于标示航道中的转弯点、航道入口等位置。标杆可以根据需要设置不同的形状和颜色,以便船只在远处就能够识别。球标:球标是一种悬挂在海上的球形标志物,常用于标示浅滩、礁石等障碍物的位置。球标可以根据需要设置不同的颜色和尺寸,以便船只在远处就能够警觉。此外,还有其他类型的海上航标,如声响标志、标志板等,它们各自有着特定的功能和用途。总的来说,海上航标在海上交通中起到了重要的导航和安全作用,帮助船只避免危险区域、按照正确的航线行驶,确保海上船舶航行安全。
2、但是海上航标碰损是航标运维的痛点,也是妨碍辖区通航安全的难题。航标碰损一方面造成国有资产损坏、流失,增加航标维护成本,另一方面损坏的航标如未及时发现和修复,容易给海上船舶带来通航安全隐患。
技术实现思路
1、本发明的目的在于:为了解决上述提出的问题,提供一种基于多传感器融合的海上航标碰撞智能监测系统。
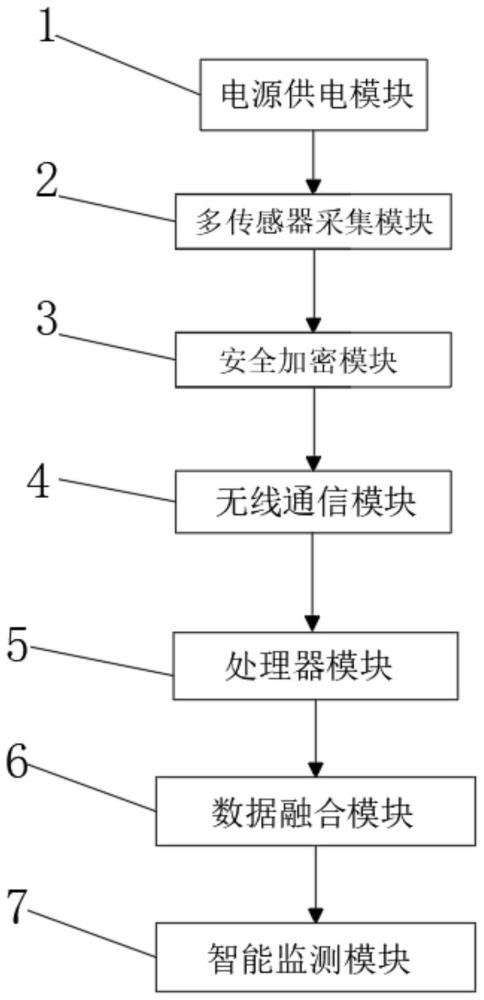
2、本发明采用的技术方案如下:一种基于多传感器融合的海上航标碰撞智能监测系统,包括电源供电模块、多传感器采集模块、安全加密模块、无线通信模块、处理器模块、数据融合模块、智能监测模块、雷达采集模块、ais数据采集模块、及时性监测模块、可靠性监测模块、合理性监测模块和软件终端监测模块,所述电源供电模块的输出端连接有所述多传感器采集模块的输入端,所述多传感器采集模块的输出端连接有所述安全加密模块的输入端,所述安全加密模块的输出端连接有所述无线通信模块的输入端,所述无线通信模块的输出端连接有所述处理器模块的输入端,所述处理器模块的输出端连接有所述数据融合模块的输入端,所述数据融合模块的输出端连接有所述智能监测模块的输入端。
3、在一优选的实施方式中,所述多传感器采集模块的内部设置有雷达采集模块和ais数据采集模块,所述雷达采集模块和ais数据采集模块的整体输出端连接有所述多传感器采集模块的输入端;
4、所述智能监测模块的内部设置有及时性监测模块、可靠性监测模块、合理性监测模块和软件终端监测模块,所述及时性监测模块、可靠性监测模块、合理性监测模块和软件终端监测模块的整体输出端连接有所述智能监测模块的输入端。
5、在一优选的实施方式中,所述电源供电模块外接8m源晶振为微控制器提供外部时钟源,同时为保证mcu供电稳定性,在每个vdd与vss引脚之间增加一个0.1uf的滤波电容;所述雷达采集模块使用simrad4g雷达的量程范围为100m~24nmile,工作在x波段,具有优异的小目标探测能力,其雷达图像中存在大量反射噪声,需要过滤噪声提取出海上船舶目标。工控机程序接入雷达背景图像后,采用连续帧差分法实现海上船舶检测,其算法流程描述如下:通过连续2帧海事雷达图像,将其进行差分,通过差分结果确定所在水域是否出现在航海上船舶,若差分结果较小,则不存在,若差分结果较大,则说明存在在航海上船舶;所述ais数据采集模块采用符合标准规范的海上船舶自动识别系统接收机,接收频点为159.975mhz和162.025mhz,接收机灵敏度≤-107dbm。海上船舶自动识别系统信息通过rs232串口接入工控机,通过阈值法自动过滤错误海上船舶时空轨迹,利用卡尔曼滤波算法自动预测和跟踪海上船舶。
6、在一优选的实施方式中,所述安全加密模块分为动态航标数据密钥预处理和最终生成两阶段。在预处理阶段,借鉴aes算法中非线性化处理方式,结合航标数据参数数据、通讯参数数据和时间参数数据提出了一种基于时间、身份和通讯参数数据的动态航标数据密钥预处理算法,该算法根据航标数据监测参数数据在本地生成身份参数数据矩阵,并基于s盒、通信双方地址参数数据对身份参数数据矩阵进行非线性处理,之后通信双方基于当前时间和通信双方地址生成通讯矩阵,并对该矩阵进行非线性处理,最后将非线性处理后的身份参数数据矩阵和通讯矩阵进行异或计算,得到最终动态航标数据密钥预处理值。在最终生成阶段,根据数据传输编号对动态航标数据密钥预处理值进行调整,考虑到md5算法的彩虹表威胁,结合hmac算法并在hmac-md5算法中融入动态航标数据密钥预处理值,以规避彩虹表威胁,根据数据传输编号对动态航标数据密钥预处理值进行调整,以进一步避免重放攻击,通过融入动态航标数据密钥预处理值的hmacmd5算法生成最终动态航标数据密钥。
7、在一优选的实施方式中,所述无线通信模块选用air720h模组。该模组支持多模无线通信传输,适用于gsm/wcdma/fdd/tdd等各种频段,支持mqtt、http、tcp、udp等传输协议,几乎满足所有物联网传输需求,在智慧物联网中有着广泛应用,mcu串口通过txd和rxd与4g模组进行相连,通过at指令集控制4g通信模组与mqtt服务器通信。所述处理器模块选用st公司的stm32f103rct6芯片。该芯片是基于armcortex-m3内核的32位微控制器,性能强大,最高支持72mhz的工作频率以及1.25dmips/mhz指令访问,拥有512k字节flash、64k字节sram、11个定时器,在外设上最多支持2个iic接口、5个usart接口、3个spi接口。该芯片硬件通信接口丰富性、mcu运行速度、存储大小,均满足硬件设备主控制器需求。
8、在一优选的实施方式中,所述数据融合模块将雷达采集模块和ais数据采集模块的目标数据融合在工控机中实现。融合的数据包含海事雷达与海上船舶自动识别系统的时间信息与空间信息。流程包含坐标转化、时间统一、目标关联以及信息融合4个部分;1.坐标转化。雷达数据坐标为极坐标形式,海上船舶自动识别系统数据采用wgs84坐标系。需要将两种传感器数据转化到同一坐标系。通过极坐标转换完成坐标转化和统一。时间统一以海事雷达数据采样频率为基准完成时间统一,设定在短时间内海上船舶航行保持迅速。同时海上船舶自动识别系统数据中可探测到海上船舶的实时速度与航向,目标关联。对海上船舶自动识别系统以及雷达进行时间、空间配准后即可对海上船舶完成关联。首先对海上船舶自动识别系统所得的海上船舶信息滤波,旨在清理雷达扫描范围之外的目标数据;其次将海上船舶自动识别系统下的海上船舶与雷达下的海上船舶通过匈牙利算法完成匹配,匹配时计算两坐标的欧氏距离并设定阈值,当两个坐标系下的海上船舶数量不相等时,若海上船舶自动识别系统下的海上船舶多,则对其进行保留,当雷达下的海上船舶多,则对其进行清理。信息融合。根据两个坐标系中匹配上的海上船舶,对其进行融合,融合信息包括海上船舶自动识别系统目标、雷达目标以及融合后目标。对于不同传感器下具有关联的数据,以精度高者为基准。例如,海上船舶自动识别系统的经纬度信息与雷达的距离信息存在关联,考虑到雷达精度较高,所以,以雷达为主对海上船舶位置进行推算,从而完成海上船舶自动识别系统与雷达的海上船舶融合。
9、在一优选的实施方式中,所述及时性监测模块为每条虚拟海上船舶自动识别系统航标数据设置一个异步定时器作为监视器,定时器定时间隔设为虚拟航标发送时间间隔的1.2倍,监视器与虚拟航标数据一一对应。使用哈希表存储航标数据,键为虚拟航标mmsi,值为虚拟航标数据。每次接收到虚拟航标数据时,通过虚拟航标mmsi更新哈希表对应虚拟航标数据,定时器每次触发时,根据系统当前时间与哈希表中对应虚拟航标更新时间的间隔时长,判断虚拟航标播发是否超时。
10、在一优选的实施方式中,所述可靠性监测模块在进行监测时,海上船舶自动识别系统发送终端使用mqtt服务器代理的虚拟海上船舶自动识别系统航标设置参数,拼接21号报文并进行播发。通过对海上船舶自动识别系统接收终端接收数据进行数据一致性检验,比较接收数据与数据库中基准数据的各个数据项是否存在差异,作为衡量单条虚拟航标数据是否正确的方法。考虑到数据的播发与海上船舶接收过程中,若在播发时出现网络波动,则易造成航标数据的错误。软件系统对虚拟海上船舶自动识别系统航标可靠性监视方案,采用过去临近n个数据的正确率作为评判标准。其中,n值的选择以及正确率对比阈值直接影响虚拟航标可靠性的监视性能,在实现过程中,n值取为10。
11、在一优选的实施方式中,所述合理性监测模块通过对海上船舶与虚拟海上船舶自动识别系统航标距离过近的监视记录,反映工作人员对虚拟航标最终设置数据是否存在人为失误。虚拟航标不存在物理实体,在航道上是不会发生与海上船舶碰撞的实际情况。但是航道上虚拟航标设置的地方,表示该位置存在需要海上船舶航行注意的因素。因此,虽然不存在海上船舶与虚拟航标碰撞的情况,但是当出现多艘海上船舶与虚拟航标距离过近时,需要考虑系统中该虚拟航标数据是否存在人为设置失误。航标合理性监视的计算数据源有别于及时性监视和可靠性监视,前两种监视均以接收的虚拟海上船舶自动识别系统航标数据为基准计算源,而合理性监视以接收的海上船舶自动识别系统数据为基准计算源。监视判定主要包含以下4个步骤:①粗筛与海上船舶进行距离计算的虚拟航标;②初步判定海上船舶是否存在距离过近可能性;③预测轨迹点;④计算距离及异常记录;⑤合理性警告判定。
12、在一优选的实施方式中,所述软件终端监测模块包含掉线监视以及在线故障监视。
13、综上所述,由于采用了上述技术方案,本发明的有益效果是:
14、本发明中,智能监测模块的内部设置有基于海上船舶自动识别系统的各个模块,使用前端网页进行参数设置,设置过程中向用户发出如周围航标密度、虚拟航标参考设置阈值、设备参考播发数据量、设备参考可靠性等提示。每个设置的虚拟航标、海上船舶自动识别系统终端都将根据设置参数,在电子航道图上进行运行效果的可视化预览。工作人员在对所设置的所有虚拟航标和海上船舶自动识别系统终端预检无误后,即可进行设置数据的发布。通过访问后端服务接口,实现设置参数的数据库持久化。后端服务通过mqtt服务器向websocket中间件发送更新标识,中间件从数据库查询数据更新基准数据。后端服务同时向指定海上船舶自动识别系统终端发送控制指令,海上船舶自动识别系统终端根据控制指令修改运行状态,从而使得整个系统可以利用ais、雷达和摄像头,构建了多传感器融合的航标碰撞智能监测系统,并在现实场景进行了应用测试和验证,实现航标碰撞预警检测“由被动到主动、由事后发现到事前预警”的转变,提升了海上船舶目标识别与跟踪水平,使得海上船舶在使用过程中尽量不会发生碰撞,从而增加了整体的安全性和可靠性,同时也使得航标在使用过程中不会轻易被损坏,增加了航标整体的耐用性,降低了后续的使用维护成本。
本文地址:https://www.jishuxx.com/zhuanli/20240731/187432.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表