基于全息感知的车辆跟踪识别方法及系统与流程
- 国知局
- 2024-07-31 20:41:25
本发明涉及数据处理,具体涉及基于全息感知的车辆跟踪识别方法及系统。
背景技术:
1、目前,判断前车追尾风险仅仰赖单一传感器的独立数据,导致风险认知不够全面。这一依赖局限了提升驾驶安全性的潜力,阻碍了全面理解潜在危险的能力。
2、综上所述,现阶段存在前车追尾风险判断往往基于单一传感器的单一数据,存在对于风险认知全面性不足,对于用户驾驶安全性的提升作用较弱的缺陷。
技术实现思路
1、本申请提供了基于全息感知的车辆跟踪识别方法及系统,用于针对解决现有技术中存在前车追尾风险判断往往基于单一传感器的单一数据,存在对于风险认知全面性不足,对于用户驾驶安全性的提升作用较弱的技术问题。
2、鉴于上述问题,本申请提供了基于全息感知的车辆跟踪识别方法。
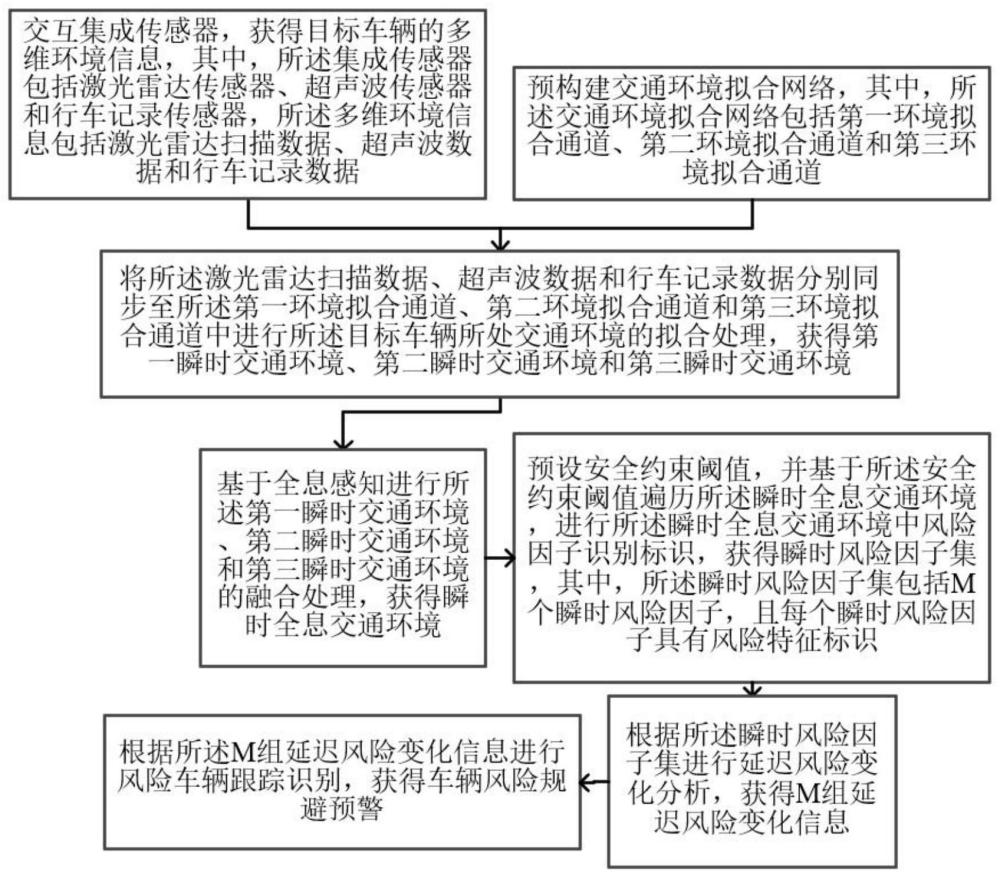
3、本申请的第一个方面,提供了基于全息感知的车辆跟踪识别方法,所述方法包括:交互集成传感器,获得目标车辆的多维环境信息,其中,所述集成传感器包括激光雷达传感器、超声波传感器和行车记录传感器,所述多维环境信息包括激光雷达扫描数据、超声波数据和行车记录数据;预构建交通环境拟合网络,其中,所述交通环境拟合网络包括第一环境拟合通道、第二环境拟合通道和第三环境拟合通道;将所述激光雷达扫描数据、超声波数据和行车记录数据分别同步至所述第一环境拟合通道、第二环境拟合通道和第三环境拟合通道中进行所述目标车辆所处交通环境的拟合处理,获得第一瞬时交通环境、第二瞬时交通环境和第三瞬时交通环境;基于全息感知进行所述第一瞬时交通环境、第二瞬时交通环境和第三瞬时交通环境的融合处理,获得瞬时全息交通环境;预设安全约束阈值,并基于所述安全约束阈值遍历所述瞬时全息交通环境,进行所述瞬时全息交通环境中风险因子识别标识,获得瞬时风险因子集,其中,所述瞬时风险因子集包括m个瞬时风险因子,且每个瞬时风险因子具有风险特征标识;根据所述瞬时风险因子集进行延迟风险变化分析,获得m组延迟风险变化信息;根据所述m组延迟风险变化信息进行风险车辆跟踪识别,获得车辆风险规避预警。
4、本申请的第二个方面,提供了基于全息感知的车辆跟踪识别系统,所述系统包括:环境信息交互单元,用于交互集成传感器,获得目标车辆的多维环境信息,其中,所述集成传感器包括激光雷达传感器、超声波传感器和行车记录传感器,所述多维环境信息包括激光雷达扫描数据、超声波数据和行车记录数据;拟合网络构建单元,用于预构建交通环境拟合网络,其中,所述交通环境拟合网络包括第一环境拟合通道、第二环境拟合通道和第三环境拟合通道;交通环境拟合单元,用于将所述激光雷达扫描数据、超声波数据和行车记录数据分别同步至所述第一环境拟合通道、第二环境拟合通道和第三环境拟合通道中进行所述目标车辆所处交通环境的拟合处理,获得第一瞬时交通环境、第二瞬时交通环境和第三瞬时交通环境;环境融合执行单元,用于基于全息感知进行所述第一瞬时交通环境、第二瞬时交通环境和第三瞬时交通环境的融合处理,获得瞬时全息交通环境;风险因子识别单元,用于预设安全约束阈值,并基于所述安全约束阈值遍历所述瞬时全息交通环境,进行所述瞬时全息交通环境中风险因子识别标识,获得瞬时风险因子集,其中,所述瞬时风险因子集包括m个瞬时风险因子,且每个瞬时风险因子具有风险特征标识;延迟风险分析单元,用于根据所述瞬时风险因子集进行延迟风险变化分析,获得m组延迟风险变化信息;跟踪识别执行单元,用于根据所述m组延迟风险变化信息进行风险车辆跟踪识别,获得车辆风险规避预警。
5、本申请中提供的一个或多个技术方案,至少具有如下技术效果或优点:
6、本申请实施例提供的方法通过交互集成传感器,获得目标车辆的多维环境信息,其中,所述集成传感器包括激光雷达传感器、超声波传感器和行车记录传感器,所述多维环境信息包括激光雷达扫描数据、超声波数据和行车记录数据;预构建交通环境拟合网络,其中,所述交通环境拟合网络包括第一环境拟合通道、第二环境拟合通道和第三环境拟合通道;将所述激光雷达扫描数据、超声波数据和行车记录数据分别同步至所述第一环境拟合通道、第二环境拟合通道和第三环境拟合通道中进行所述目标车辆所处交通环境的拟合处理,获得第一瞬时交通环境、第二瞬时交通环境和第三瞬时交通环境;基于全息感知进行所述第一瞬时交通环境、第二瞬时交通环境和第三瞬时交通环境的融合处理,获得瞬时全息交通环境;预设安全约束阈值,并基于所述安全约束阈值遍历所述瞬时全息交通环境,进行所述瞬时全息交通环境中风险因子识别标识,获得瞬时风险因子集,其中,所述瞬时风险因子集包括m个瞬时风险因子,且每个瞬时风险因子具有风险特征标识;根据所述瞬时风险因子集进行延迟风险变化分析,获得m组延迟风险变化信息;根据所述m组延迟风险变化信息进行风险车辆跟踪识别,获得车辆风险规避预警。达到了基于全息感知准确判定目标车辆追尾风险故障,进而基于追踪进行风险故障变化分析,从而准确判定目标车辆行驶安全风险,以提示驾驶员进行有效及时的风险避让,提高驾驶安全性的技术效果。
技术特征:1.基于全息感知的车辆跟踪识别方法,其特征在于,所述方法包括:
2.如权利要求1所述的方法,其特征在于,所述方法还包括:
3.如权利要求2所述的方法,所述方法还包括:
4.如权利要求3所述的方法,其特征在于,所述方法还包括:
5.如权利要求4所述的方法,其特征在于,将所述激光雷达扫描数据、超声波数据和行车记录数据分别同步至所述第一环境拟合通道、第二环境拟合通道和第三环境拟合通道中进行所述目标车辆所处交通环境的拟合处理,获得第一瞬时交通环境、第二瞬时交通环境和第三瞬时交通环境,所述方法还包括:
6.如权利要求1所述的方法,其特征在于,基于全息感知进行所述第一瞬时交通环境、第二瞬时交通环境和第三瞬时交通环境的融合处理,获得瞬时全息交通环境,所述方法还包括:
7.如权利要求6所述的方法,其特征在于,预设安全约束阈值,并基于所述安全约束阈值遍历所述瞬时全息交通环境,进行所述瞬时全息交通环境中风险因子识别标识,获得瞬时风险因子集,其中,所述瞬时风险因子集包括m个瞬时风险因子,且每个瞬时风险因子具有风险特征标识,所述方法还包括:
8.基于全息感知的车辆跟踪识别系统,其特征在于,所述系统包括:
技术总结本发明提供了基于全息感知的车辆跟踪识别方法及系统,涉及数据处理技术领域,通过将多维传感器数据同步至多维环境拟合通道获得多维瞬时交通环境,进而基于全息感知瞬时交通环境融合获得瞬时全息交通环境,进而基于风险因子识别获得瞬时风险因子集,根据瞬时风险因子集进行风险车辆跟踪识别获得车辆风险规避预警。解决现有技术中存在前车追尾风险判断往往基于单一传感器的单一数据,存在对于风险认知全面性不足,对于用户驾驶安全性的提升作用较弱的技术问题。达到了基于全息感知准确判定目标车辆追尾风险故障,进而基于追踪进行风险故障变化分析,从而准确判定目标车辆行驶安全风险,以提示驾驶员进行有效及时的风险避让,提高驾驶安全性的技术效果。技术研发人员:闫军,霍建杰受保护的技术使用者:智慧互通科技股份有限公司技术研发日:技术公布日:2024/6/11本文地址:https://www.jishuxx.com/zhuanli/20240731/187431.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。