一种基于双截面电警数据的车道级排队长度估计方法
- 国知局
- 2024-07-31 20:44:25
本发明涉及交通信息领域,尤其是涉及一种基于双截面电警数据的车道级排队长度估计方法。
背景技术:
1、排队长度是反映信控交叉口供需关系与协调质量的关键指标,有助于评估并改进现有信号控制方案。传统上,排队长度估计通常基于线圈、地磁等定点检测器采集的流量、占有率和速度信息,但这些方法往往受限于较粗的集计粒度以及高昂的维护成本。网联车轨迹能够提供连续的车辆位置与速度信息且无需额外成本,但估计精度在很大程度上取决于网联车的渗透率与数据上传频率。由于平安城市建设和交通执法管理的需要,近年来,卡口电警系统在各个城市内得到广泛的安装与使用。海量电警数据作为一项新兴数据源提供了高质量的个体级车辆检测信息,通过匹配上下游的车辆号牌能够实现对车辆路径的还原,在交通状态估计方面具备潜力。
2、目前,国内外基于电警或类似自动车辆识别数据的排队长度估计研究可分为单截面与双截面两类。单截面方法仅利用目标进口道的电警数据,通过挖掘车辆离去序列中的潜在模式得到最有可能的排队长度值,具有设备布设需求少、计算简单等优势,但在交通量接近饱和或过饱和的条件下估计精度会显著下降。另一方面,双截面方法额外利用进口道上游交叉口电警数据,基于输入输出模型或冲击波理论等实现周期级的排队长度估计,能够适应各种饱和度场景。然而现有双截面方法通常假设严格的先进先出或特定的到达模式,与真实的交通状态存在差距。
3、因此通过松弛上述假设,基于双截面电警数据提出实现更加精准的排队长度估计模型,对于补充现有排队长度估计方法论具有重要的现实意义。
技术实现思路
1、本发明的目的就是为了提供一种精准排队长度估计的基于双截面电警数据的车道级排队长度估计方法。
2、本发明的目的可以通过以下技术方案来实现:
3、一种基于双截面电警数据的车道级排队长度估计方法,包括以下步骤:
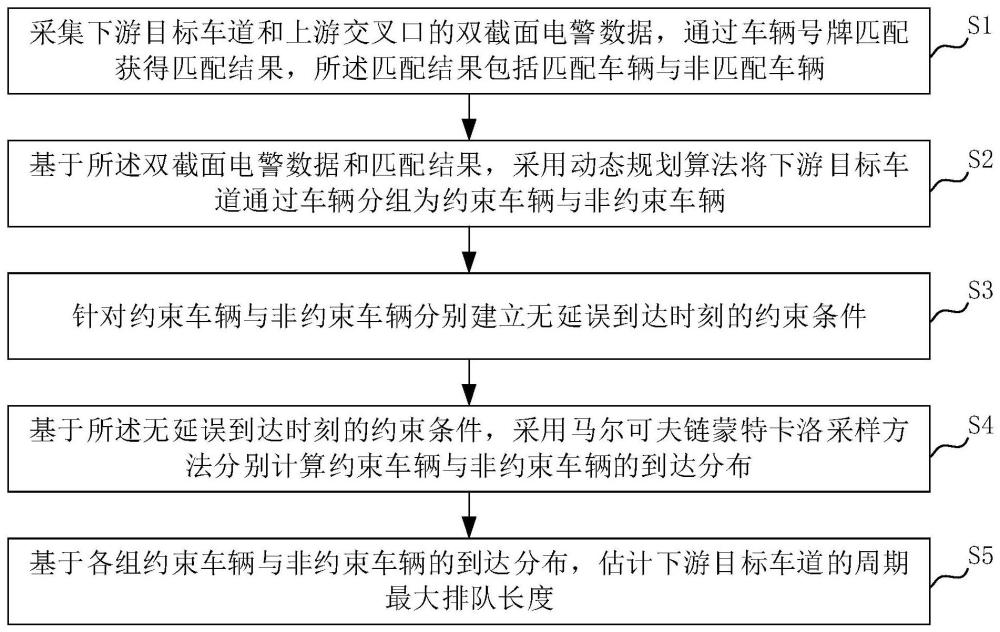
4、s1、采集下游目标车道和上游交叉口的双截面电警数据,通过车辆号牌匹配获得匹配结果,所述匹配结果包括匹配车辆与非匹配车辆;
5、s2、基于所述双截面电警数据和匹配结果,采用动态规划算法将下游目标车道通过车辆分组为多组约束车辆与非约束车辆;
6、s3、针对约束车辆与非约束车辆分别建立无延误到达时刻的约束条件;
7、s4、基于所述无延误到达时刻的约束条件,采用马尔可夫链蒙特卡洛采样方法分别计算约束车辆与非约束车辆的到达分布;
8、s5、基于约束车辆与非约束车辆的到达分布,估计下游目标车道的周期最大排队长度。
9、进一步地,所述双截面电警数据包括车道编号、车道方向、时间戳与车牌信息。
10、进一步地所述匹配车辆为被上下游同时检测到的车辆,所述非匹配车辆为仅被下游目标车道或上游交叉口检测到的车辆。
11、进一步地所述下游目标车道通过车辆分组简化为对所有匹配车辆进行分组,组内的所有车辆构成约束车辆,由各组约束车辆分隔开的车辆构成各组非约束车辆。
12、进一步地所述下游目标车道通过车辆分组的具体步骤包括:
13、s21、构建长度为n的列表lst,记录所有匹配车辆在上游交叉口的离去时刻,根据车辆到达下游目标车道的顺序进行排序,并考虑超车现象,给定组间离去间隔阈值;
14、s22、初始化长度为n的列表dp,初始值为1,p[i]为从车辆0到车辆i划分出的最大组数,初始化长度为n+1的列表break_points,初始值为0,break_points[i]记录各组之间的划分点;
15、s23、对于i←1到n-1;
16、s24、对于j←0到i-1,判断组间离去间隔是否超过所述组间离去间隔阈值,若是,则将车辆j处作为划分点,更新p[i]←max(dp[j]+1,dp[i]),若否,则执行下一步骤;
17、s25、记录划分点break_points[dp[i]]←i+1,并重复执行步骤s24-s25;
18、s26、对于i←0到dp[n-1]-1,输出第i组约束车辆,包含的车辆编号为break_points[i]到break_points[i+1]-1;
19、s27、根据约束车辆分组结果,将剩余的车辆进行分组,构成多组非约束车辆。
20、进一步地步骤s3中,建立约束车辆的无延误到达时刻的约束条件的具体步骤包括:
21、建立约束车辆的到达顺序约束,所述到达顺序约束为:
22、
23、建立约束车辆的自由流行程时间约束,所述自由流行程时间约束为:
24、
25、建立约束车辆的到达时刻约束,所述到达时刻约束为:
26、
27、建立约束车辆的非排队车辆约束,所述非排队车辆约束为:
28、
29、将所述到达顺序约束、自由流行程时间约束、到达时刻约束和非排队车辆约束整理为矩阵形式,形成无延误到达时刻的约束条件,所述无延误到达时刻的约束条件为:
30、at≤b
31、式中,为车辆k的无延误到达时刻,h为饱和车头时距,为实际车头时距,为车辆k的实际到达时刻,为约束车辆集合,为非约束车辆集合,为车辆k在上游交叉口的离去时刻,与分别为车辆k自由流行程时间的最小值和最大值,为匹配车辆集合,表示目标车道非排队车辆集合,a是一个m×n的矩阵,其中m为约束的数量,n=|k|为组中的车辆数,t代表n维的无延误到达时刻向量,b为m维的常数向量。
32、进一步地,步骤s3中,建立非约束车辆的无延误到达时刻的约束条件的具体步骤包括:
33、根据前后相邻两辆匹配车辆建立矩阵约束形式,形成非约束车辆的无延误到达时刻的约束条件,所述无延误到达时刻的约束条件为:
34、autu≤bu
35、式中,au是一个mu×nu的矩阵,其中mu为约束的数量,nu=|ku|+2为组中的车辆数,为非约束车辆集合,tu代表nu维的无延误到达时刻向量,bu为mu维的常数向量。
36、进一步地,步骤s4中,计算约束车辆的到达分布的具体步骤包括:
37、s401、采用马尔可夫链蒙特卡洛采样方法在多胞形中均匀采样t1,t2,…,tn∈ω,t=(t1,t2,…,tn);
38、s402、计算其中为t的联合概率密度函数,对于匹配车辆与非匹配车辆分别有:
39、
40、s403、对于各组约束车辆k中的每一车辆k;
41、s404、根据约束车辆的无延误到达时刻的约束条件at≤b计算车辆k无延误到达的最小时刻和最大时刻并分别进行向下取整和向上取整;
42、s405、对于到在t中选择满足ak,tt≤bk,t的nk,t个点计算则约束车辆k的无延误到达时刻在[t,t+1]内的到达分布为:
43、
44、式中,为车辆k的无延误到达时刻,为车辆k在上游交叉口的离去时刻,为匹配车辆集合,gk(τk)表示车辆k自由流行程时间的概率密度函数,ak,tt≤bk,t表示车辆k的无延误到达时刻在[t,t+1]内,即的矩阵表达,ωk,t表示多胞形即ω中满足车辆k的无延误到达时刻在[t,t+1]内的区域,v与vk,t分别表示ω与ωk,t的体积,有
45、进一步地,步骤s4中,计算非约束车辆的到达分布的具体步骤包括:
46、s411、利用现有马尔可夫链蒙特卡洛采样方法在多胞形中均匀采样t1,t2,…,tn∈ω,记t=(t1,t2,…,tn);
47、s412、计算其中为tu的联合概率密度函数;
48、s413、对于各组非约束车辆ku中的每一车辆k;
49、s414、根据非约束车辆的无延误到达时刻的约束条件autu≤bu计算车辆k无延误到达的最小值与最大值并且分别进行向下取整和向上取整;
50、s415、对于到在t中选择满足ak,ttu≤bk,t的nk,t个点计算则车辆k的无延误到达时刻在[t,t+1]内的到达分布为:
51、
52、其中,式中,为车辆k的无延误到达时刻,与表示非约束车辆的前后两匹配车辆无延误到达时刻的概率密度函数,au是一个mu×nu的矩阵,其中mu为约束的数量,nu=|ku|+2为组中的车辆数,为非约束车辆集合,tu代表nu维的无延误到达时刻向量,bu为mu维的常数向量,ak,ttu≤bk,t表示车辆k的无延误到达时刻在[t,t+1]内,即的矩阵表达;ωk,t表示多胞形即ω中满足车辆k的无延误到达时刻在[t,t+1]内的区域;v与vk,t分别表示ω与ωk,t的体积,有
53、进一步地,步骤s5中,估计下游目标车道的周期最大排队长度的具体步骤包括:
54、s51、将周期c或之后离去的车辆集合记为kc,初始化累计饱和车头时距hcum为0;
55、s52、对于kc中的第i辆车;
56、s53、根据实际离去车头时距与饱和车头时距的最小值,对hcum进行累加:
57、
58、s54、记第i辆车在设定的排队阈值gc+hcum-dthr前到达的概率p,将概率p作为周期c的排队长度qc不小于i的概率,即p(qc≥i)←p;
59、s55、判断p是否等于0,若是,则执行下一步骤,若否,则返回步骤s53;
60、s56、计算周期c排队长度为i的概率:
61、p(qc=i)=p(qc≥i)-p(qc≥i+1)
62、s57、计算周期c排队长度均值95%置信区间下限和上限分别为:
63、
64、
65、
66、式中,gc为周期c的绿灯起始时刻,dthr为延误阈值,qc为周期c的排队长度,p为周期c排队长度为i的概率。
67、与现有技术相比,本发明具有以下有益效果:
68、(1)本发明根据上下游电警数据匹配结果,将车辆划分为约束车辆和非约束车辆,并分别建立无延误到达时刻的约束条件,松弛了现有技术中严格按照先进先出或特定的到达模式的假设,更贴近实际的交通状态,排队长度估计更加准确。
69、(2)本发明考虑自由流行程时间的随机性,使得排队长度的估计值以分布的形式输出,可服务于交叉口的鲁棒控制。
70、(3)本发明充分利用匹配车辆提供的交通流信息,进一步推导非匹配车辆的到达分布,因此即使在较低的匹配率下也能够取得良好的估计效果。
本文地址:https://www.jishuxx.com/zhuanli/20240731/187647.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表