具有安全感知功能的面向复杂服务需求的自动驾驶系统
- 国知局
- 2024-07-31 20:47:18
本发明涉及自动驾驶领域,具体为一种具有安全感知功能的面向复杂服务需求的自动驾驶系统。
背景技术:
1、自动驾驶技术作为人工智能研究领域的一个重要分支,近年研究非常火热,强化学习和计算机视觉也是目前人工智能领域的两大重要研究领域。强化学习是通过智能体与环境的交互,在试错中进行学习,其最大的优点是可以达到超越人类水平的表现(如游戏领域、围棋领域等)。计算机视觉技术也是人工智能的一个重要领域,是指让计算机和系统能够从图像、视频和其他视觉输入中获取有意义的信息,并根据该信息采取行动或提供建议。自动驾驶技术在强化学习与计算机视觉技术的日趋成熟的过程中,也在快速地发展。自动驾驶汽车,为一种需要驾驶员辅助或者完全不需操控的车辆。作为自动化载具,自动驾驶汽车可以不需要人类操作即能感测其环境及到导航。自动驾驶技术可以提高驾驶安全性,同时可以有效减轻交通压力,并因此提高交通系统的运输效率。asp(answer setprogramming),即“回答集编程”。asp提供了一种简单而强大的建模语言来解决组合问题。asp关注要解决的实际问题,而不是解决的方案。和c语言、python等语言有很大的不同,asp是一门逻辑编程语言。一个简单的asp程序包括三个部分:事实、规则、输出。事实和规则,用来描述问题;输出,用来查看结果。
2、针对自动驾驶场景中需要解决的复杂服务需求,提出一种具有安全感知功能的面向复杂服务需求的自动驾驶系统。
技术实现思路
1、本发明的目的在于提供一种具有安全感知功能的面向复杂服务需求的自动驾驶系统,将深度强化学习技术与计算机视觉技术结合使用,并结合任务规划与控制算法进一步解决了人工智能技术可解释性差、安全性不足的问题。
2、本发明为实现上述目的所采用的技术方案是:
3、一种具有安全感知功能的面向复杂服务需求的自动驾驶系统,包括:
4、感知模块,用于接收车辆周围环境视觉图像,提取环境抽象特征,发送给基于强化学习的运动层级规划模块;
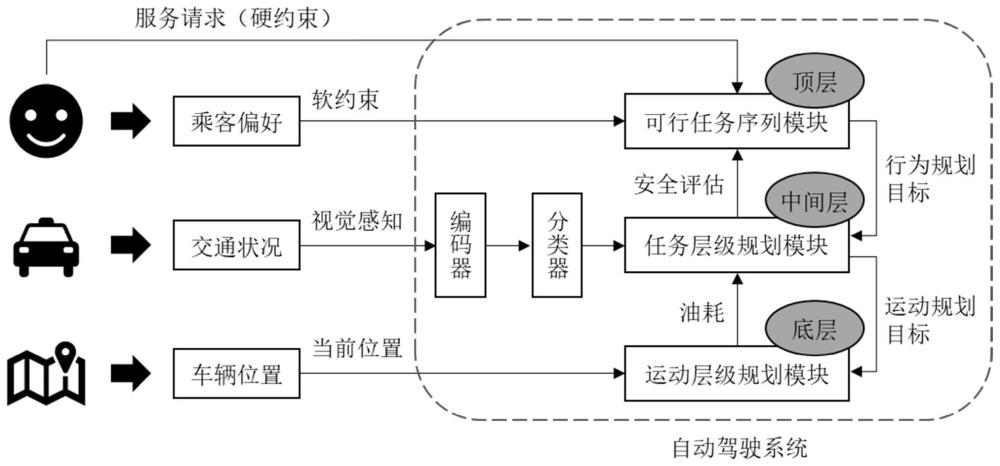
5、驾驶安全评估模块,用于根据视觉输入评估当前执行的驾驶行为是否安全,还用于根据效用函数结合油耗、视觉安全、乘客偏好实时评估驾驶行为序列p使用;
6、可行任务序列模块,接收用户需求指令,分类标注为“硬约束”、“软约束”,再根据“硬约束”、“软约束”规划出所有可行的任务序列seq;
7、任务层级规划模块,根据评估结果,将所有可行的任务序列seq实时分解更新为驾驶行为序列p;
8、基于强化学习的运动层级规划模块,根据车辆当前位置和目标位置将驾驶行为序列p规划为车辆具体行驶轨迹坐标;
9、控制模块,对运动层级规划模块输出的轨迹进行精确跟踪。
10、所述相机布置的车体的前后左右四个方向,用于同时采集多角度视频帧图像。
11、所述感知模块为训练好的resnet-18网络,网络输入为车辆周围环境视觉图像,输出为抽象特征:信号灯状态、语义分割信息、距离信号灯的距离、是否在交叉路口、距离车道中线的距离,以及与道路的角度,所述语义分割信息包括动态目标、信号灯、道路标记、道路、人行道和背景。
12、所述效用函数如下,所述评估结果为二分类结果,1表示安全,0表示不安全;
13、utility(p)=e(α0*cost(p)+α1*pref(p)+α2*safe(p))
14、其中,α0和α1取负值;α2取正值;cost(p)为基于驾驶时间或驾驶距离来计算;pref(p)为当违反乘客偏好时取一个惩罚值(正值);safe(p)为驾驶行为序列p中每个驾驶行为的安全性的和,每个驾驶行为的安全性依据感知模块接收的视觉图像判断当前是否安全,安全为1,危险为0;e为期望,油耗基于驾驶轨迹进行评估,一个行为序列p可以有多个驾驶轨迹。
15、所述“硬约束”为用户输入需求中必须执行的指令,所述“软约束”为用户输入需求中非必要执行的指令,该项影响效用函数中的用户偏好项。
16、所述驾驶行为序列p为若干个可行的简单任务的序列链接,所述可行的简单任务序为7中基本的驾驶行为:汇入左侧车道、汇入右侧车道、左转弯、右转弯、直行、泊车、停车。
17、所述实时更新驾驶行为序列p包括对其中的分解后的简单序列进行实时更新。
18、所述规划车辆具体行驶轨迹坐标,包括根据感知模块提供的视觉信息和地图提供的位置信息,计算无碰撞且最短的路径坐标。
19、所述基于强化学习的运动层级规划模块得到的轨迹,采用pid控制算法或传统先进控制算法实现精确路径跟踪。
20、本发明具有以下有益效果及优点:
21、本发明通过综合采用强化学习、计算机视觉、传统控制算法等技术,通过将问题层层分级,逐次规划,构建了从解决复杂的车辆驾驶服务需求问题到具体车辆的控制的整套自动驾驶系统,解决了自动驾驶如何解决复杂服务需求的问题,并进一步提高了自动驾驶的灵活性、安全性和可解释性。
技术特征:1.一种具有安全感知功能的面向复杂服务需求的自动驾驶系统,其特征在于,包括:
2.根据权利要求1所述的具有安全感知功能的面向复杂服务需求的自动驾驶系统,其特征在于,所述相机布置的车体的前后左右四个方向,用于同时采集多角度视频帧图像。
3.根据权利要求1所述的具有安全感知功能的面向复杂服务需求的自动驾驶系统,其特征在于,所述感知模块为训练好的resnet-18网络,网络输入为车辆周围环境视觉图像,输出为抽象特征:信号灯状态、语义分割信息、距离信号灯的距离、是否在交叉路口、距离车道中线的距离,以及与道路的角度,所述语义分割信息包括动态目标、信号灯、道路标记、道路、人行道和背景。
4.根据权利要求1所述的具有安全感知功能的面向复杂服务需求的自动驾驶系统,其特征在于,所述效用函数如下,所述评估结果为二分类结果,1表示安全,0表示不安全;
5.根据权利要求1所述的具有安全感知功能的面向复杂服务需求的自动驾驶系统,其特征在于,所述“硬约束”为用户输入需求中必须执行的指令,所述“软约束”为用户输入需求中非必要执行的指令,该项影响效用函数中的用户偏好项。
6.根据权利要求1所述的具有安全感知功能的面向复杂服务需求的自动驾驶系统,其特征在于,所述驾驶行为序列p为若干个可行的简单任务的序列链接,所述可行的简单任务序为7中基本的驾驶行为:汇入左侧车道、汇入右侧车道、左转弯、右转弯、直行、泊车、停车。
7.根据权利要求1所述的具有安全感知功能的面向复杂服务需求的自动驾驶系统,其特征在于,所述实时更新驾驶行为序列p包括对其中的分解后的简单序列进行实时更新。
8.根据权利要求1所述的具有安全感知功能的面向复杂服务需求的自动驾驶系统,其特征在于,所述规划车辆具体行驶轨迹坐标,包括根据感知模块提供的视觉信息和地图提供的位置信息,计算无碰撞且最短的路径坐标。
9.根据权利要求1所述的具有安全感知功能的面向复杂服务需求的自动驾驶系统,其特征在于,所述基于强化学习的运动层级规划模块得到的轨迹,采用pid控制算法或传统先进控制算法实现精确路径跟踪。
技术总结本发明公开了一种具有安全感知功能的面向复杂服务需求的自动驾驶系统,系统包含感知模块、驾驶安全评估模块、可行任务序列模块、任务层级规划模块、基于强化学习的运动层级规划模块、控制模块。其中,感知模块用于场景理解;驾驶安全评估模块根据场景理解信息进行安全评估;可行任务序列模块在驾驶任务层面进行规划;任务层级规划模块负责车辆行为方面的规划;基于强化学习的运动层级规划模块实现了对车辆轨迹的精确规划;控制模块采用控制算法跟踪规划路线;本发明设计的具有安全感知功能的面向复杂服务需求的自动驾驶系统针对自动驾驶车辆实现生活场景中的复杂服务需求问题,构建出一套舒适、安全且高效的自动驾驶系统。技术研发人员:史泽林,赵怀慈,刘明第,宋志美,许泽超受保护的技术使用者:中国科学院沈阳自动化研究所技术研发日:技术公布日:2024/6/18本文地址:https://www.jishuxx.com/zhuanli/20240731/187782.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表