一种低能见度车道诱导警示系统
- 国知局
- 2024-07-31 21:04:09
本发明涉及交通安全设备,具体涉及一种低能见度车道诱导警示系统。
背景技术:
1、在一些海拔位置高,山林密度大的西部及南部地区,极易在特定季节的特定时间段产生危害道路交通安全的雾霾,雨雪等恶劣气候,为了降低恶劣气候对交通安全的影响,道路监管部门往往仅能采取封路,重点路段布设24小时闪烁警示雾灯,led显示屏固定显示警示标语等单一手段,这些措施不仅花费的成本高(包括封路成本及设备能耗成本),而且还有措施滞后,提示信息错误等诸多缺陷。为了更加精准,及时的为道路交通安全提供恶劣气候预警,有必要提供一种低能见度恶劣气候诱导警示系统。
技术实现思路
1、本发明的目的在于提供一种低能见度车道诱导警示系统,能够更加精准且及时的为车辆在雨雪,雾霾等恶劣气候条件下提供行车安全警示。当车辆发生交通事故碰撞护栏时,可对护栏碰撞事件进行监测,及时发布事故信息至车辆后方信息屏上,通知后方车辆。
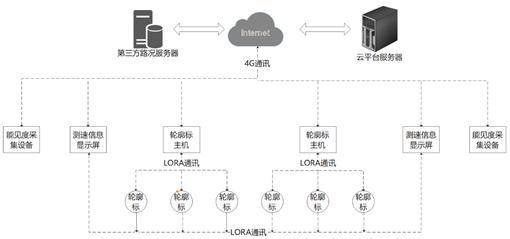
2、本发明公开了一种低能见度车道诱导警示系统,包括能见度采集设备、测速信息显示屏设备、轮廓标主机、双面轮廓标和云平台服务器,所述能见度采集设备根据设备采集距离间隔设置在多雾路段,所述测速信息显示屏设备与能见度采集设备数量位置对应安装在多雾路段,所述双面轮廓标在多雾路段沿线护栏固定间隔安装,所述轮廓标主机根据轮廓标主机辐射信号范围设置在多雾路段;
3、所述测速信息显示屏设备对来向车辆进行车速检测并显示,包括测速雷达、车速显示屏、led信息显示屏、爆闪灯及主控制卡,当所述测速信息显示屏设备内置的测速雷达检测到来向车辆时,将车速数据发送至车速显示屏及主控制卡,车速显示屏接收到车辆车速后会将该车速值与预置限速值相比较,显示车速,同时主控制卡接收到车速数据后,判断该车速是否满足触发条件,若满足出发条件则接通爆闪灯闪烁,接通led信息显示屏显示提示信息;
4、所述能见度采集设备间隔预设时间采集当前能见度数据并通过无线网络将能见度数据发送至云平台服务器,云平台服务器接收相邻两台能见度采集设备的能见度数据,对能见度数据进行分析,当相邻两台能见度采集设备的能见度值均低于预设值时,云平台服务器下发低能见度模式指令给测速信息显示屏设备,下发轮廓标开启指令给轮廓标主机;
5、所述测速信息显示屏设备接收到低能见度模式指令启动低能见度模式,低能见度模式下当测速雷达检测到来向车辆时测速信息显示屏设备设置正常点亮车速显示屏,接通爆闪灯闪烁,启动语音播报提示,接通led信息显示屏灯光闪烁显示提示信息;所述轮廓标主机接收到轮廓标开启指令后,通过无线传输模块广播发送开启指令,双面轮廓标接收到开启指令后指示灯闪烁。
6、进一步地,所述双面轮廓标内置无线通信模块、定位授时模块、加速度传感器芯片、语音模块及喇叭,所述无线通信模块用于接收轮廓标主机的控制指令,所述定位授时模块用于实现路段内的双面轮廓标同步闪烁,所述加速度传感器芯片用于检测撞击及三轴姿态角,所述语音模块及喇叭用于播报警示语音信息给轮廓标周围停留的车辆及行人。
7、进一步地,当所述双面轮廓标遭受撞击时,加速度传感器芯片产生中断信号,双面轮廓标主控单元读取撞击加速度值,延迟后持续读取三轴姿态角度并计算与默认三轴姿态角度差值,根据撞击加速度值及三轴姿态角度判断撞击程度并通过无线传输模块发送遭受撞击事件给云平台服务器,云平台服务器转发撞击事件给测速信息显示屏设备,所述测速信息显示屏设备接收到撞击事件后返回应答报文,led信息显示屏闪烁显示提示信息,同时云平台服务器产生撞击告警。
8、进一步地,所述双面轮廓标主控单元通过加速度传感器芯片读取撞击加速度值计算出xyz三轴方向上的加速度值ax,ay,az,通过公式:
9、,
10、,
11、,
12、计算出xyz三轴方向相对重力反方向之间的夹角,,,将计算出xyz三轴方向相对重力反方向之间的夹角,,与默认姿态角度,,进行比较;
13、当双面轮廓标遭受撞击时产生中断信号,双面轮廓标主控单元读取xyz三轴方向上的撞击加速度值ax,ay,az,延迟预设时间后持续读取当前姿态角度,,并计算与默认姿态角度,,差值,,,,,,当ax或ay或az大于预设加速度值,并且或或大于预设角度时,表明双面轮廓标遭受到大于预设加速度的撞击并且当前姿态角度在xyz三轴方向上至少有一轴方向角度与原角度偏移大于预设角度,此时双面轮廓标会通过轮廓标主机向云平台服务器发送遭受撞击事件报文。
14、进一步地,所述双面轮廓标间隔预设时间对当前姿态角度进行一次自检,读取当前xyz三轴角度与轮廓标内存储的默认xyz三轴角度作比较,计算当前姿态角度,,,与默认姿态角度,,差值,,,,,,当差值,,均小于预设值时,判定为姿态角自检正常,若姿态角自检不正常,则不再检测遮挡物及语音报警。
15、进一步地,所述能见度采集设备每分钟采集多个能见度瞬时值,根据采集到的能见度瞬时值计算每分钟能见度数据的平均值,n分钟后会产生n条分钟能见度平均值,n≥3,根据n条分钟能见度平均值计算n分钟能见度平均值,将当前分钟能见度数据的平均值与n分钟能见度数据平均值上传云平台服务器,云平台服务器提取相邻两个能见度采集设备的n分钟能见度数据平均值,当相邻两个能见度采集设备的n分钟能见度数据平均值均低于预设数值时,云平台服务器下发低能见度模式指令给测速信息显示屏设备,下发轮廓标开启指令给轮廓标主机。
16、进一步地,所述双面轮廓标分为ab两组,ab两组双面轮廓标交叉安装在道路两侧护栏,其中,a组双面轮廓标内还设有毫米波雷达,位于应急车道护栏的b组双面轮廓标内还设有激光测距传感器,a组双面轮廓标内的毫米波雷达实时检测通过雷达辐射的扇形区域内的车辆车速及距离,通过对车速及距离的判断,发送相关警示事件报文,联动所述测速信息显示屏设备显示警示信息。
17、进一步地,在非低能见度模式下,当a组中的双面轮廓标检测到行车道中车辆车速低于预设值或为0时,发送指令给该a组双面轮廓标对应的b组双面轮廓标、沿车辆行驶方向相邻的下一个a组双面轮廓标以及相邻的下一个a组双面轮廓标对应的b组双面轮廓标,收到指令的双面轮廓标指示灯闪烁,语音模块及喇叭播报警示信息,同时发送信息给轮廓标主机,轮廓标主机接收到信息后发送给云平台服务器,云平台服务器将信息转发给测速信息显示屏设备,当检测到车辆驶离时,a组双面轮廓标通过轮廓标主机向云平台服务器发送低速或停车警示事件撤销报文,云平台服务器在接收到最新发送触发信息轮廓标的撤销报文后将此报文转发给测速信息显示屏设备;
18、当a组中的双面轮廓标检测到应急车道车辆停车持续预设时间或车辆在应急车道行驶时,若该a组的双面轮廓标位于应急车道一侧的护栏,则发送指令给该a组双面轮廓标同一护栏的下一个b组双面轮廓标,若该a组的双面轮廓标位于应急车道对面护栏,则发送指令给该a组双面轮廓标对应的b组双面轮廓标以及对应的b组双面轮廓标沿车辆行驶方向相邻的下一个a组双面轮廓标,收到指令的双面轮廓标指示灯闪烁,语音模块及喇叭播报警示信息,并通过轮廓标主机向云平台服务器发送应急车道停车或行车事件报文,云平台服务器将信息转发给测速信息显示屏设备,当车辆离开时通过轮廓标主机向云平台服务器发送应急车道停车或行车撤销报文;
19、在低能见度模式下,ab两组双面轮廓标指示灯闪烁,轮廓标暂停车辆低速检测,当a组中的双面轮廓标检测到行车道中车辆经过时,发送指令给该a组双面轮廓标对应的b组双面轮廓标,此a组双面轮廓标及收到指令的b组双面轮廓标指示灯改变闪烁模式,并在车辆离开后恢复原闪烁方式;
20、当双面轮廓标检测到行车道车辆车速为0时,发送指令给该a组双面轮廓标对应的b组双面轮廓标、沿车辆行驶方向相邻的下一个a组双面轮廓标以及相邻的下一个a组双面轮廓标对应的b组双面轮廓标,此a组双面轮廓标及收到指令的双面轮廓标指示灯改变闪烁模式,语音模块及喇叭播报警示信息,同时发送信息给轮廓标主机,轮廓标主机接收到信息后发送给云平台服务器,云平台服务器将信息转发给测速信息显示屏设备,当检测到车辆驶离时,双面轮廓标指示灯恢复原闪烁模式,a组双面轮廓标通过轮廓标主机向云平台服务器发送停车警示事件撤销报文,云平台服务器在接收到最新发送触发信息轮廓标的撤销报文后将此报文转发给测速信息显示屏设备;
21、当a组中的双面轮廓标检测到应急车道车辆停车持续预设时间或车辆在应急车道行驶时,若该a组的双面轮廓标位于应急车道一侧的护栏,则发送指令给该a组双面轮廓标同一护栏的下一个b组双面轮廓标,若该a组的双面轮廓标位于应急车道对面护栏,则发送指令给该a组双面轮廓标对应的b组双面轮廓标以及对应的b组双面轮廓标沿车辆行驶方向相邻的下一个a组双面轮廓标,收到指令的双面轮廓标指示灯改变闪烁模式,语音模块及喇叭播报警示信息,并通过轮廓标主机向云平台服务器发送应急车道停车或行车事件报文,当车辆离开时通过轮廓标主机向云平台服务器发送应急车道停车或行车撤销报文。
22、进一步地,所述云平台服务器实时获取该路段实时路况数据,当该路段发送拥堵或缓行时,云平台服务器实时发送拥堵事件报文给轮廓标主机及测速信息显示屏设备,所述测速显示屏设备显示拥堵信息,所述轮廓标主机接收到拥堵事件后转发拥堵信息报文给双面轮廓标,位于应急车道对面护栏的a组和b组双面轮廓标收到拥堵信息报文暂停闪烁及语音播报功能,位于应急车道护栏的a组双面轮廓标接收到拥堵信息报文后调整毫米波雷达检测范围,仅对应急车道内的车辆做车速检测,位于应急车道护栏b组双面轮廓标接收到拥堵信息报文后开启激光测距传感器检测应急车道违停车辆,至拥堵结束后,云平台服务器发送拥堵结束报文给轮廓标主机及测速信息显示屏设备,轮廓标主机接收到拥堵事件结束报文后转发拥堵结束报文给双面轮廓标,a组双面轮廓标恢复毫米波雷达检测距离,恢复闪烁及语音播报功能,b组双面轮廓标恢复闪烁及语音播报功能,关闭激光测距传感器。
23、进一步地,所述双面轮廓标上设有二维码,当车辆因故障在行车道或应急车道上停车,可通过扫描二维码录入信息至云平台服务器请求救援,云平台服务器根据上传的信息、双面轮廓标的坐标信息以及该双面轮廓标附近外接的摄像头拍摄画面进行判断是否发送应行车道或急车道停车撤销报文。
24、本发明的有益效果:
25、本发明通过能见度采集设备,实时采集能见度信息,云平台服务器依据获取的实时能见度数据控制设备的工作模式,前端设备与后端云平台服务器联合控制,响应速度快,实时性好;多雾路段内采用双能见度仪,数据准确性高;
26、本发明能感知撞击的轮廓标,护栏遭受撞击时会将撞击加速度和姿态数据进行联合运算分析,分析结果准确率高,并能够在该事故点前方信息显示屏上立即显示事故信息,事故信息同时上报至云平台服务器;
27、本发明能够做到前端设备采集及感知,后端云平台服务器控制,且紧急情况下前端设备直接预警并报送后端云平台服务器,切实为多雾路段内行驶车辆起到了保驾护航的作用。
本文地址:https://www.jishuxx.com/zhuanli/20240731/188193.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表