一种辅助自动驾驶方法与流程
- 国知局
- 2024-07-31 21:06:54
本发明涉及自动驾驶,具体地说,涉及一种辅助自动驾驶方法。
背景技术:
1、随着人工智能的进步,强算力推动下的自动驾驶技术逐步成为交通领域的主要技术,将带来更高效、安全和环保的出行方式。自动驾驶车辆通过整合各种传感器、算法和控制系统,能够理解周围环境并在没有人类驾驶员干预的情况下安全导航。然而,尽管这一领域取得了显著进展,自动驾驶技术仍面临诸多挑战,特别是在高度复杂和动态的道路条件下的精确定位和决策能力方面。
2、目前,自动驾驶系统主要依赖于视觉识别、雷达扫描、激光测距和全球定位系统等技术来感知周围环境。这些技术各有优缺点,例如,视觉识别在光照条件良好时表现出色,但在夜间或恶劣天气条件下可能失效;雷达扫描和激光测距能够提供精确的距离和速度测量,但成本较高且对某些材料的反射能力有限;提供全球范围内的定位服务,但在城市峡谷、隧道或其他卫星信号遮挡区域的精度有限。
3、尽管这些技术的结合在一定程度上解决了自动驾驶车辆的导航问题,但在高速公路等封闭或半封闭环境中,要实现高度自动化的驾驶,仍需进一步提高系统的精确性和可靠性。特别是,当前自动驾驶技术在高速公路上的应用,受限于无法实时获取前方道路状况和周围车辆动态的信息,使得自动驾驶车辆在复杂交通流中的表现不如人类驾驶员,因此,设计一种辅助自动驾驶方法。
技术实现思路
1、本发明的目的在于提供一种辅助自动驾驶方法,以解决上述背景技术中提出的无法实时获取前方道路状况和周围车辆动态的信息,使得自动驾驶车辆在复杂交通流中的表现不如人类驾驶员的问题。
2、为实现上述目的,本发明目的在于提供了一种辅助自动驾驶方法,包括如下步骤:
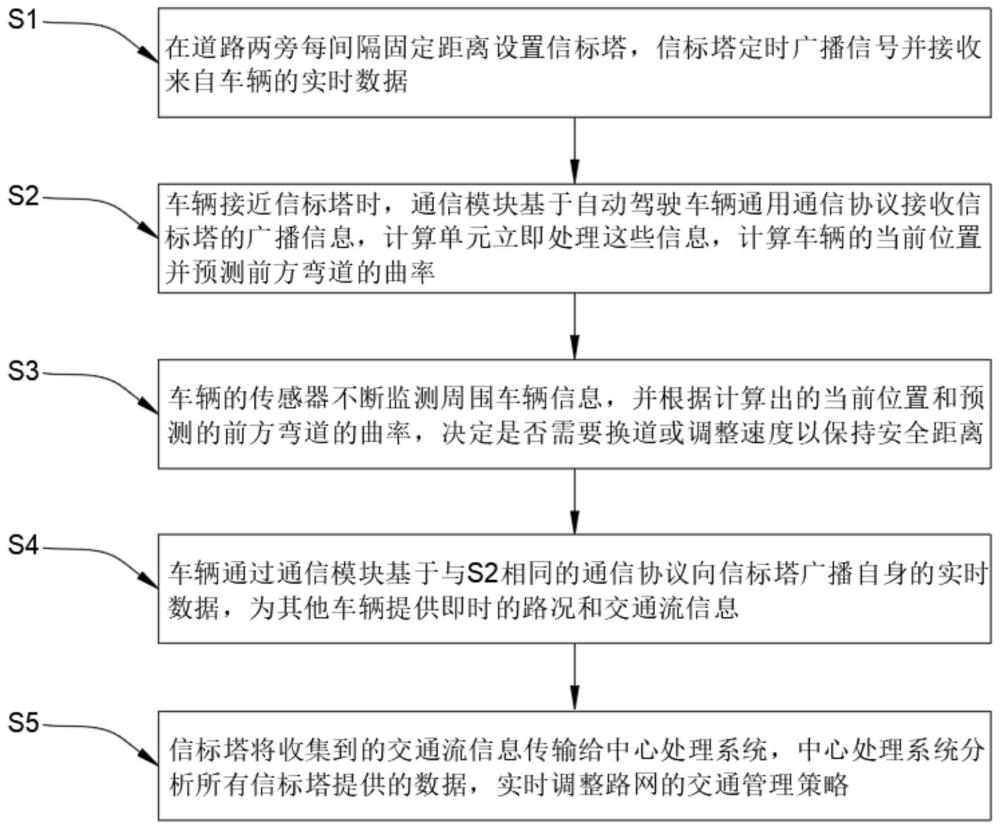
3、s1:在道路两旁每间隔固定距离设置信标塔,信标塔定时广播信号并接收来自车辆的实时数据;
4、s2:车辆接近信标塔时,通信模块基于自动驾驶车辆通用通信协议接收信标塔的广播信息,计算单元立即处理这些信息,计算车辆的当前位置并预测前方弯道的曲率;其中,计算车辆的当前位置的步骤为:
5、通过卫星系统得到车辆初步位置:
6、
7、其中,为通过卫星定位系统得到的车辆初步位置;为纬度;为经度;
8、获取第个信标塔的位置:
9、
10、其中,为第个信标塔的位置;为第个信标塔的纬度;为第个信标塔的经度;;为信标塔的个数;
11、对于每个信标塔,使用经纬度计算车辆与信标塔之间的大圆距离:
12、
13、其中,为车辆到第个信标塔的大圆距离;是地球平均半径;;为车辆纬度与第个信标塔纬度之差的绝对值;;为车辆经度与第个信标塔经度之差的绝对值;
14、提取车辆到三个信标塔的大圆距离计算出车辆的具体位置:
15、
16、
17、
18、其中,为车辆的具体位置;为第一个信标塔的三位坐标;为第二个信标塔的三位坐标;为第三个信标塔的三位坐标;为车辆到第一个信标塔的大圆距离;为车辆到第二个信标塔的大圆距离;为车辆到第三个信标塔的大圆距离。
19、s3:车辆的传感器不断监测周围车辆信息,并根据计算出的当前位置和预测的前方弯道的曲率,决定是否需要换道或调整速度以保持安全距离;
20、s4:车辆通过通信模块基于与s2相同的通信协议向信标塔广播自身的实时数据,为其他车辆提供即时的路况和交通流信息;
21、s5:信标塔将收集到的交通流信息传输给中心处理系统,中心处理系统分析所有信标塔提供的数据,实时调整路网的交通管理策略。
22、作为本技术方案的进一步改进,所述s1中,信标塔定时广播的信号内容包括自身的位置信息、标准时间、路段信息、临近路段上车辆的运行信息以及封闭路道的侵入物信息;其中,自身的位置信息和标准时间基于地面的卫星定位系统。
23、作为本技术方案的进一步改进,所述s2中,自动驾驶车辆通用通信协议由通信层和关键协议组成,其中,通信层包括物理层、数据链路层、网络层、传输层和应用层;关键协议包括消息协议、安全协议、发现协议和数据交换协议。
24、作为本技术方案的进一步改进,所述s2中预测前方路况的表达式为:
25、根据车辆路径上点的连续坐标变化,进而推算曲率:
26、
27、其中,为曲率;和分别为路径上某点处切线向量的x分量和y分量的变化率,和分别代表路径上某点处法线向量的x分量和y分量的二次导数。
28、作为本技术方案的进一步改进,所述s3的具体步骤如下:
29、s31:设置前方弯道曲率的安全阈值以及车辆与车辆之间的安全距离阈值,以此进行风险评估;
30、s32:根据风险评估的结果,进行换道决策以及变速控制。
31、作为本技术方案的进一步改进,所述s31中,评估的标准为:
32、如果前方弯道曲率超过预设阈值,则认为需要减速以安全过弯;
33、如果车辆与最近车辆的距离小于安全距离,并且车辆与最近车辆的相对速度大于0,则考虑采取避让措施进行减速或者换道。
34、作为本技术方案的进一步改进,所述s32中,进行换道决策以及变速控制的计算步骤如下:
35、换道决策:
36、检查目标车道是否安全,计算换道所需时间与预测时间内在当前车道的风险评估,若换道后预期风险降低且换道所需要的时间小于安全时间窗口,则决定换道;
37、变速控制:
38、实施速度调整时,考虑加速度限制,避免急刹车或加速:
39、
40、其中,为弯道曲率的减速需求;为避障需求;为控制时间周期。
41、作为本技术方案的进一步改进,所述s4中,车辆广播自身的实时数据种类包括车辆信息、方向信息、位置信息、速度信息、速度状态、转向信息和故障信息。
42、与现有技术相比,本发明的有益效果:
43、该一种辅助自动驾驶方法中,结合信标塔和卫星定位系统,大幅提升车辆的定位精度,尤其是在复杂环境下;通过信标塔实现车辆间的信息实时共享,增强车辆对周围环境的感知能力,提升行车安全;
44、同时,车流中某一车辆突然制动时,因后方车辆能实时接收来自信号塔的车辆状态信息,使得后方车辆能够以快于人类的反应速度同时制动,能大幅减少事故率;
45、即车辆能够根据收到的路段信息和其他车辆状态信息调整自身行驶策略,如速度调整、换道、避障等,以适应动态变化的路况。系统能够减少交通拥堵,优化交通流,通过减少事故发生率和改善交通流量管理,提高整个路网的运输效率。
技术特征:1.一种辅助自动驾驶方法,其特征在于:包括如下步骤:
2.根据权利要求1所述的一种辅助自动驾驶方法,其特征在于:s1中,信标塔定时广播的信号内容包括自身的位置信息、标准时间、路段信息和临近路段上车辆的运行信息以及封闭路道的侵入物信息;其中,自身的位置信息和标准时间基于地面的卫星定位系统。
3.根据权利要求2所述的一种辅助自动驾驶方法,其特征在于:s2中,自动驾驶车辆通用通信协议由通信层和关键协议组成,其中,通信层包括物理层、数据链路层、网络层、传输层和应用层;关键协议包括消息协议、安全协议、发现协议和数据交换协议。
4.根据权利要求3所述的一种辅助自动驾驶方法,其特征在于:s2中,预测前方弯道的曲率的表达式为:
5.根据权利要求4所述的一种辅助自动驾驶方法,其特征在于:s3的具体步骤如下:
6.根据权利要求5所述的一种辅助自动驾驶方法,其特征在于:s31中,评估的标准为:
7.根据权利要求6所述的一种辅助自动驾驶方法,其特征在于:s32中,进行换道决策以及变速控制的计算步骤如下:
8.根据权利要求7所述的一种辅助自动驾驶方法,其特征在于:s4中,车辆广播自身的实时数据种类包括车辆信息、方向信息、位置信息、速度信息、速度状态、转向信息和故障信息。
技术总结本发明涉及自动驾驶技术领域,具体地说,涉及一种辅助自动驾驶方法。其包括如下步骤:在道路两旁每间隔固定距离设置信标塔,信标塔定时广播信号并接收来自车辆的实时数据;车辆接近信标塔时,计算单元计算车辆的当前位置并预测前方弯道的曲率;车辆的传感器不断监测周围车辆信息,决定是否需要换道或调整速度以保持安全距离;车辆向信标塔广播自身的实时数据;信标塔将收集到的交通流信息传输给中心处理系统。该种辅助自动驾驶方法中,结合信标塔和卫星定位系统,大幅提升车辆的定位精度,车辆能够根据收到的路段信息和其他车辆状态信息调整自身行驶策略,以适应动态变化的路况。技术研发人员:李荣权,王翰受保护的技术使用者:以声动人(上海)教育科技有限公司技术研发日:技术公布日:2024/6/30本文地址:https://www.jishuxx.com/zhuanli/20240731/188425.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。