基于桥梁防撞主动防御系统的分级预警系统及方法
- 国知局
- 2024-07-31 21:08:08
本发明涉及交通控制系统领域,具体涉及基于桥梁防撞主动防御系统的分级预警系统及方法。
背景技术:
1、随着河海航运量加大与船舶吨位和航速的增加,以及河海桥梁的大量兴建,船舶碰撞桥梁的几率越来越大。一旦船桥相撞,严重时将造成船毁人亡,桥梁倒塌等重大事故,经济损失巨大;而且还可能由于船体破损泄漏,引起灾难性环境污染。
2、申请号为cn201710703788.6的专利公开了一种桥梁主动防船撞监测预警系统及方法,系统包括视频监控装置、激光测高装置、报警装置以及主控机、集控中心,视频监控设备用于完成对通航船只的偏航监测;激光测高装置用于完成对通航船只的高度监测;主控机用于完成对通航船只运行状态的存储和处理;集控中心监测预警机制判断是否向船舶发布预警信息或其他信息,实现对船舶通航的远程监控。本发明利用船舶的实时数据与软件算法相结合,预警灵敏度更高,弥补了传统基于船舶交通管理系统和被动预防船舶撞击设施的在功能及效率上局限性。实现了全监控的自动化,减少了人的工作量并保证了事故预警的可靠性。实用性更强,探测距离更远,应急反应时间更长。但仍然存在以下不足之处:该桥梁主动防船撞监测预警系统虽然能够对通航船只进行警报处理,对通航船只进行提醒,但是未对其进行警报分级,无法逐级加强提醒级别,提醒效果不佳,导致对通航船只提醒效果不佳,仍然存在通航船只碰撞桥梁的隐患发生。
3、如何改善现有的桥梁主动防船撞监测预警系统不能进行分级预警,导致对通航船只提醒效果不佳是本发明的关键,因此,亟需一种基于桥梁防撞主动防御系统的分级预警系统及方法。
技术实现思路
1、为了克服上述的技术问题,本发明的目的在于提供基于桥梁防撞主动防御系统的分级预警系统及方法:该分级预警系统通过船只的位置将其分为报警船只和预警船只,直接通过无人机对报警船只进行报警处理,保证了报警船只能够精确地收到报警警报,通过危险系数对预警船只进行分级,获得危险系数相对应的选中预警级,根据选中预警级响起不同分贝值的预警警报,之后通过预警警报的预警时长的判断,判定预警时长响起始末时危险系数是否降低,表示船只是否收到预警警报,若未收到增强预警警报的分贝值,若是仍然未收到进入第一报警区后被标记为报警船只,进行最终的无人机报警处理,解决了现有的桥梁主动防船撞监测预警系统不能进行分级预警,导致对通航船只提醒效果不佳的问题。
2、本发明的目的可以通过以下技术方案实现:
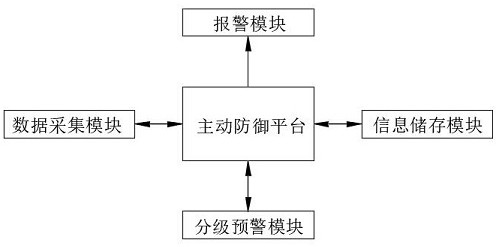
3、基于桥梁防撞主动防御系统的分级预警系统,包括信息储存模块、主动防御平台、数据采集模块、分级预警模块以及报警模块;其中:
4、信息储存模块,用于根据桥梁位置设置第一报警区和第二报警区,并将第一报警区和第二报警区发送至主动防御平台;
5、主动防御平台,用于根据第一报警区和第二报警区将船只分别标记为预警船只和报警船只,并将预警船只和报警船只发送至数据采集模块,还用于根据数据采集模块反馈的危险系数wx获得选中预警级,并将选中预警级发送至分级预警模块;
6、数据采集模块,用于获取预警船只的危险系数wx,并将危险系数wx发送至主动防御平台,还用于实时采集报警船只的报位点,并将报位点发送至报警模块;
7、分级预警模块,用于根据选中预警级响起预警警报;
8、报警模块,用于根据报位点进行报警警报处理。
9、作为本发明进一步的方案:所述信息储存模块的工作过程如下:
10、获取桥梁位置,以桥梁位置为中心,在桥梁位置外围设置危险区,在危险区外围设置隐患区,并将危险区和隐患区分别标记为第一报警区和第二报警区,并将第一报警区和第二报警区发送至主动防御平台。
11、作为本发明进一步的方案:所述数据采集模块的工作过程如下:
12、采集预警船只的行驶速率和预警船只的位置,并分别标记为预速值ys和预位点;
13、采集预位点与第一报警区边缘的最近距离,并将其标记为预一距yj1,采集预位点与第二报警区边缘的最近距离,并将其标记为预二距yj2,采集预位点与桥梁位置的最近距离,并将其标记为预桥距yj0;
14、将预速值ys、预一距yj1、预二距yj2以及预桥距yj0代入公式得到危险系数wx,其中q1、q2、q3、q4分别为预速值ys、预一距yj1、预二距yj2以及预桥距yj0的预设比例系数,其中q1>q2>q3>q4>1;
15、将危险系数wx发送至主动防御平台;
16、实时采集报警船只的位置,并将其标记为报位点,并将报位点发送至报警模块。
17、作为本发明进一步的方案:所述主动防御平台的工作过程如下:
18、将危险系数wx与预警等级yji进行匹配,预警等级yji对应一个取值范围qfi,其中i=1、……、n,n为自然数,qfi=(aj,aj+1],其中j=1、……、m,m为自然数,且aj+1>aj;比如,qf1=(a1,a2],qf5=(a5,a6];
19、若危险系数wx∈(aj,aj+1],则危险系数wx对应取值范围qfi,将取值范围qfi对应的预警等级yji标记为选中预警级;
20、将选中预警级发送至分级预警模块。
21、作为本发明进一步的方案:基于桥梁防撞主动防御系统的分级预警方法,包括以下步骤:
22、步骤一:信息储存模块获取桥梁位置,以桥梁位置为中心,在桥梁位置外围设置危险区,在危险区外围设置隐患区,并将危险区和隐患区分别标记为第一报警区和第二报警区,并将第一报警区和第二报警区发送至主动防御平台;
23、步骤二:主动防御平台将进入第二报警区和第一报警区的船只分别标记为预警船只和报警船只,并将预警船只和报警船只发送至数据采集模块;
24、步骤三:数据采集模块采集预警船只的行驶速率和预警船只的位置,并分别标记为预速值ys和预位点;
25、步骤四:数据采集模块采集预位点与第一报警区边缘的最近距离,并将其标记为预一距yj1,采集预位点与第二报警区边缘的最近距离,并将其标记为预二距yj2,采集预位点与桥梁位置的最近距离,并将其标记为预桥距yj0;
26、步骤五:数据采集模块将预速值ys、预一距yj1、预二距yj2以及预桥距yj0代入公式得到危险系数wx,其中q1、q2、q3、q4分别为预速值ys、预一距yj1、预二距yj2以及预桥距yj0的预设比例系数,其中q1>q2>q3>q4>1;
27、步骤六:数据采集模块将危险系数wx发送至主动防御平台;
28、步骤七:数据采集模块实时采集报警船只的位置,并将其标记为报位点,并将报位点发送至报警模块;
29、步骤八:主动防御平台将危险系数wx与预警等级yji进行匹配,预警等级yji对应一个取值范围qfi,其中i=1、……、n,n为自然数,qfi=(aj,aj+1],其中j=1、……、m,m为自然数,且aj+1>aj;比如,qf1=(a1,a2],qf5=(a5,a6];
30、若危险系数wx∈(aj,aj+1],则危险系数wx对应取值范围qfi,将取值范围qfi对应的预警等级yji标记为选中预警级;
31、步骤九:主动防御平台将选中预警级发送至分级预警模块;
32、步骤十:分级预警模块接收到选中预警级响起预警警报,预警警报的声音分贝值与选中预警级的级别成正比关系,即选中预警级的级别越高预警警报的声音分贝值越高;
33、步骤十一:分级预警模块采集预警警报的响起时间,并将其标记为预警时长js,将预警时长js发送至主动防御平台;
34、步骤十二:主动防御平台将预警时长js与预警时长阈值jsy进行比较,获取预警时长js=0和预警时长js=预警时长阈值jsy时的危险系数wx,并分别标记为起始值和达阈值,将起始值和达阈值进行比较:
35、若起始值≥达阈值,不进行任何操作;
36、若起始值<达阈值,则生成升级指令,并将升级指令发送至分级预警模块;
37、步骤十三:分级预警模块接收到升级指令后将选中预警级的级别加一,并将加一后的选中预警级标记为选中预警级;
38、步骤十四:报警模块包括若干个用于报警的无人机,报警模块接收到报位点后控制无人机飞往报位点上方进行响起报警警报处理。
39、本发明的有益效果:
40、本发明的基于桥梁防撞主动防御系统的分级预警系统及方法,通过信息储存模块根据桥梁位置设置第一报警区和第二报警区,并将第一报警区和第二报警区发送至主动防御平台,通过主动防御平台根据第一报警区和第二报警区将船只分别标记为报警船只和预警船只,并将报警船只和预警船只发送至数据采集模块,通过数据采集模块获取预警船只的危险系数,并将危险系数发送至主动防御平台,主动防御平台危险系数获得选中预警级,并将选中预警级发送至分级预警模块,通过数据采集模块实时采集报警船只的报位点,并将报位点发送至报警模块;该分级预警系统通过船只的位置将其分为报警船只和预警船只,直接通过无人机对报警船只进行报警处理,保证了报警船只能够精确地收到报警警报,通过危险系数对预警船只进行分级,获得危险系数相对应的选中预警级,根据选中预警级响起不同分贝值的预警警报,之后通过预警警报的预警时长的判断,判定预警时长响起始末时危险系数是否降低,表示船只是否收到预警警报,若未收到增强预警警报的分贝值,若是仍然未收到进入第一报警区后被标记为报警船只,进行最终的无人机报警处理;该分级预警系统通过对船只进行多级预警报警处理,逐级加强提醒级别,保证了船只能够准确收到预警报警警报,从而实现对船只进行有效的提醒,提醒效果好,消除船只碰撞桥梁的隐患。
本文地址:https://www.jishuxx.com/zhuanli/20240731/188525.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表