一种基于大数据的智慧城市停车优化管理方法与流程
- 国知局
- 2024-07-31 21:11:12
本发明属于停车管理,特别是涉及一种基于大数据的智慧城市停车优化管理方法。
背景技术:
1、随着车辆人均拥有量的日益增长,“停车难”已经成为很多市民出行的痛点,大量的停车需求与有限的停车泊位资源越发不匹配。同时,驾驶员在不熟悉的路段需求停车时,往往需要花费较多的时间来寻找附近有空闲停车位的停车场或路内泊位,导致停车不便。另外,由于现有的停车信息未能充分公开,导致一些较为隐蔽的停车位却利用率较低,形成巨大的停车资源浪费;而且驾驶员在停车场盲目驾驶寻找车位过程中,耗费大量时间精力,寻找过程中容易造成停车场拥堵甚至出现事故。
2、因此,如何打通驾驶员与附近停车位之间的信息壁垒成为一个亟需解决的问题。
技术实现思路
1、本发明的目的在于提供一种基于大数据的智慧城市停车优化管理方法,通过驾驶员访问智慧停车管理平台选择停车场,平台获取未被占用的停车位栅格并生成入口到停车位的路径规划,解决了现有的城市停车刚需缺口大、泊位利用率不高、驾驶员车位寻找困难的问题。
2、为解决上述技术问题,本发明是通过以下技术方案实现的:
3、本发明为一种基于大数据的智慧城市停车优化管理方法,包括如下步骤:
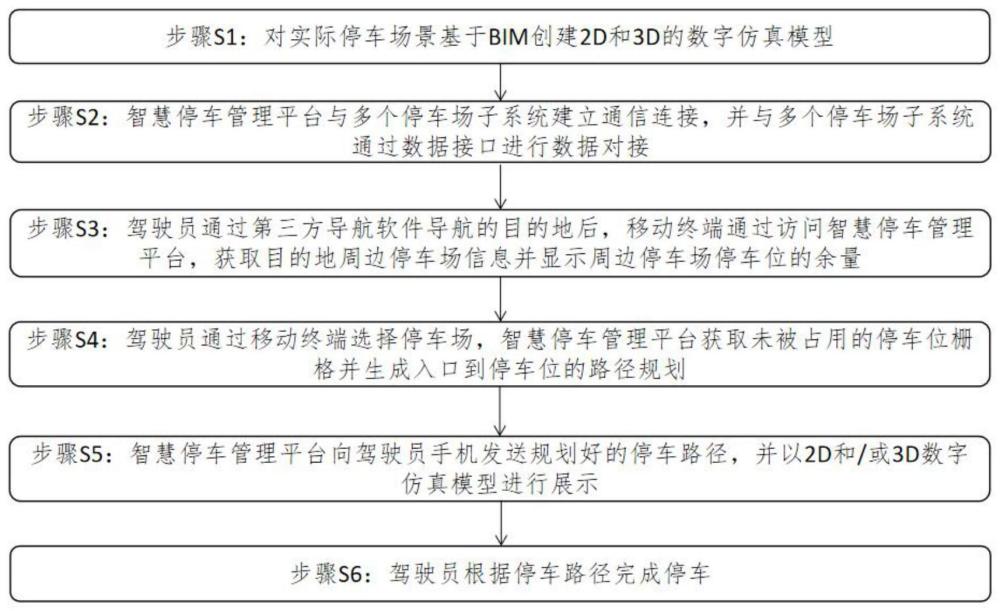
4、步骤s1:对实际停车场景基于bim创建2d和3d的数字仿真模型;数字仿真模型包括真实物联网设备状态属性、物理环境和物理过程;数字仿真模型因素包括环境观测和物理数据,建立可视的2d和3d的数字仿真模型,3d的数字仿真模型方便管理员在后台对停车场的情况进行监视和管理,而2d的数字仿真模型供驾驶员移动终端访问智慧停车管理平台时进行展示;
5、步骤s2:智慧停车管理平台与多个停车场子系统建立通信连接,并与多个停车场子系统通过数据接口进行数据对接;驾驶员通过移动终端导航到目的地时,移动终端自动访问智慧停车管理平台;
6、步骤s3:驾驶员通过第三方导航软件导航的目的地后,移动终端通过访问智慧停车管理平台,获取目的地周边停车场信息并显示周边停车场停车位的余量;智慧停车管理平台与多个停车场的子系统连接,能够给访问的移动终端展示停车场占位率和停车场流动率,方便驾驶员根据实际需求对附近的停车场进行选择。
7、步骤s4:驾驶员通过移动终端选择停车场,智慧停车管理平台获取未被占用的停车位栅格并生成入口到停车位的路径规划;智慧停车平台可以向驾驶员推荐指定的停车位,为了防止车位被别的车辆占位,驾驶员可以通过向智慧停车平台付费来提前预约该车位,对于已经被预约的车位,平台将不会推荐其他驾驶员导航到该车位;同时,车位上的车牌核对装置也同时对停入车位车辆进行车牌识别,当错误车牌的车辆停入时,发出警报提醒车辆禁止驶入,车位已经被占。
8、步骤s5:智慧停车管理平台向驾驶员手机发送规划好的停车路径,并以2d和/或3d数字仿真模型进行展示;
9、为了方便数字仿真模型进行展示,可以利用bim可视化编程工具在gim三维图形工具的基础上,将数字仿真模型转换成停车场gim数字模型,具体流程如下:
10、步骤1:打开gim建模工具,创建一个新的symbol符号并赋予模型及描述;
11、步骤2:定义停车场的进口点位和出口点位,并可以定义车位位置以及车辆过道位置;
12、步骤3:选择基本图元选项卡,选择基本图元建立停车场设备位置,放置时定义放置位置;
13、步骤4:设备添加完成时,为设备添加唯一id以及gim参数属性。
14、步骤s6:驾驶员根据停车路径完成停车。
15、作为一种优选的技术方案,所述步骤s1中,基于bim创建2d和3d的数字仿真模型的具体流程如下:
16、步骤s11:将停车场二维实测cad图纸导入bim三维建模工具中,并根据控制点坐标构建bim模型;
17、步骤s12:利用bim可视化编程工具在bim三维图形工具的基础上,将停车场区域地图进行栅格化处理;
18、步骤s13:利用蚁群算法计算栅格化地图内的停车路径;
19、步骤s14:规范各类停车场设备的数据处理,构建智慧停车管理平台,进行停车位状态和设备运行环境的实时监测、预警和评估功能,形成智慧停车管理平台。
20、作为一种优选的技术方案,所述步骤s11中,停车场二维实测cad图纸导入bim三维建模工具前,需要将停车场的cad图纸进行分层处理,并将每一层所属的车位位置进行编号逐一保存,并按照地理坐标确定模型的基点。
21、作为一种优选的技术方案,所述步骤s12中,利用蚁群算法计算栅格化地图内的停车路径的具体步骤如下:
22、步骤s121:停车场区域地图采用低分辨率进行建模处理,将停车场区域地图分为m*n个栅格;
23、步骤s122:设divisor为每个区域地图大小的度量;
24、步骤s123:在建模处理后的栅格地图中,分别标记出车位的栅格和过道的栅格;
25、步骤s124:将建模得到的车位栅格图与过道栅格图进行合并;
26、步骤s125:利用车位上的传感器判断车位是否被车辆占用,并将已经占用的车位栅格设置成已停;
27、步骤s126:获取空的停车位的栅格以及起始点栅格;
28、步骤s127:采用蚁群算法并计算每一层局部区域内,由起始点栅格到空停车位的路径;若在该层局部区域内没有得到路径,则规划起始点栅格到下一层通道的进口栅格,再由下一层通道的进口栅格到空停车位的路径;若每一层局部区域均没有得到路径,则在栅格地图中标记为障碍;
29、步骤s128:将上一步得到的局部区域路径进行合并,得到最终的路径,算法结束。
30、作为一种优选的技术方案,所述步骤s127中,计算局部区域内的路径时,将各个过道的栅格进行函数拟合,将过道的栅格拟合成一条平滑的曲线,具体拟合的公式如下:
31、
32、式中,λ为平滑系数,yi表示拟合曲线与原数据的近似程度,∫{f″(t)}dt表示t时刻,拟合曲线的斜率;∫{f″(t)}dt越大,则表示函数去屑的走向越曲折,当λ=0时,拟合函数f(x)可无线弯曲,使得函数表示的曲线经过所有的样本点,使拟合的函数数据误差的平方和为0,从而是rss最小;当λ=∞时,拟合函数f(x)无线平滑,以至于成为一条直线;所以在计算出rss后,应该选择rss最大的值作为选定的规划路径。
33、作为一种优选的技术方案,所述步骤s13中,利用蚁群算法计算栅格化地图内的停车路径时,利用图像分割算法对栅格化地图进行分割,生成图像的不同初始化区域t={y1,y2,...,yn},初始化后默认所有图像的相似度为y=100%;对不同初始化区域的栅格化图像进行路径计算,当分割后的图像中出现一处路径被占用,即可在该图像重新进行路径规划算法;这样可以避免重新规划路线,只需要重新规划分割后路径被占用的图像中的路径即可,提高了路径规划效率,降低了平台的运算压力。
34、作为一种优选的技术方案,所述步骤s5中,智慧停车管理平台设置有分别与若干个车位编码一一对应的车牌核对装置,该车牌核定装置安装在用户私家车位的后侧,用于判定与实际车牌号码对应的车辆停放位置错误,包括:
35、步骤s51:智慧停车管理平台调取与停车位编码的目标车牌核对装置;
36、步骤s52:获取目标车牌核对装置发送的核对车牌号码;
37、步骤s53:当核对车牌号码与实际车牌号码不一致,则判定与实际车牌号码对应的车辆停放位置错误;
38、步骤s54:当核对车牌号码与实际车牌号码一致,则判定车牌号码对应的车辆不存在停放错误的情况,并发送与实际车牌号码对应的车辆停放位置正确信息至数字仿真模型进行展示。
39、作为一种优选的技术方案,所述步骤s53中,判定实际车牌号码对应的车辆停放位置错误之后,在车管所数据库中查询与实际车牌号对应的车主联系方式,并电话或短信通知车主进行挪车。
40、作为一种优选的技术方案,所述数字仿真模型实时获取停车场的车辆停放密度、停车场道路车辆属性以及停车场出入口进出车辆流量,并输入到动态指数分析模型中,根据所述动态指数分析模型,输出车辆动态指数;所述车辆动态指数对停车场占位率和停车场流动率进行展示和排序,并将排序结果在智慧停车管理平台进行展示。
41、本发明具有以下有益效果:
42、(1)本发明通过驾驶员通过智慧停车管理平台获取目的地周边停车场信息并显示停车位的余量,平台获取未被占用的停车位栅格并生成入口到停车位的路径规划,提高了驾驶员的停车效率,避免造成停车场的拥堵;
43、(2)本发明通过将停车位的路径规划分为多个局部区域,对每个局部区域的路径规划,一旦某个局部区域出现拥堵,对局部区域进行重新路径规划即可,避免重新进行全部路段的路径规划,提高了路径规划效率,减轻了平台的运算压力。
44、(3)本发明通过在每个车位安装车牌核对装置,对已经预约的车位或者私家车位进行监控,对停入车牌错误的车辆发出警报,避免出现错停、误停的情况。
45、当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有优点。
本文地址:https://www.jishuxx.com/zhuanli/20240731/188755.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表