一种区域卸荷动力效应的边坡失稳超前预警监测方法及装置
- 国知局
- 2024-07-31 21:14:19
本发明涉及边坡灾害超前预警,尤其涉及一种区域卸荷动力效应的边坡失稳超前预警监测方法及装置。
背景技术:
1、由于边坡失稳灾害具有复杂性、随机性和不确定性,如何准确的对边坡失稳灾害进行超前预警是一项极具困难的事情。
2、目前,对边坡稳定性进行判定的常用方法主要有工程地质分析法、极限平衡分析法以及数值分析方法。工程地质分析法是通过工程地质勘察,综合考虑影响边坡稳定的主要因素以及可能发生的失稳模式得出边坡稳定性。工程地质分析法对地质条件较为复杂的边坡区域能阐明其失稳模式和失稳机制,但所需耗费人力物力较大,且只能定性给出边坡稳定状态而不能对未来稳定状态进行定量评价,存在一定的局限性。极限平衡法的优势是力学模型简单,可以定量的对边坡稳定性进行评价,但使用该方法对边坡稳定性进行计算时,需要人为的对滑坡边界进行简化并需要假定条块间的作用力方向和位置,存在一定的主观性,且所建立的模型是与时间无关的静力学模型,不能考虑随着时间的改变坡体中应力-应变状态的变化趋势,无法对边坡进行动态监测预警。数值分析法以有限元应力分析为基础,通过结合强度折减与极限平衡原理对所求区域内边坡稳定性进行分析,数值分析法的优点是计算过程简单,便于实际应用,缺点是理论上有缺陷,不能反映滑体最容易出现破坏的区域和边坡失稳演化过程。
3、显然地,上述三种方法均不能基于时空效应对边坡失稳演化过程进行描述,具有不准确性、不及时性等缺陷。于是,针对边坡稳定性评价必须依靠边坡监测手段来进行动态监控和验证。然而,常规的监测手段无法对边坡失稳破坏现象进行超前预警。现有的研究表明,边坡失稳演化过程会导致基岩的构造应力和孔隙水压力发生不同程度的改变。因此,为了实现对边坡失稳的超前预警,需要寻找边坡失稳演化过程与边坡下方基岩内构造应力和孔隙水压力之间的变化规律,同时辅以对基岩内的构造应力和孔隙水压力的实时监测,共同构建边坡稳定性超前预警系统,对保障人民生命财产安全和国家经济建设顺利进行具有重要意义。
4、故针对现有技术存在的问题,本设计积极研究改良,于是有了本发明一种区域卸荷动力效应的边坡失稳超前预警监测方法及装置。
技术实现思路
1、本发明之第一目的是针对现有技术中,常规的监测手段无法对边坡失稳破坏现象进行超前预警等缺陷提供一种区域卸荷动力效应的边坡失稳超前预警监测装置。
2、本发明之第二目的是针对现有技术中,常规的监测手段无法对边坡失稳破坏现象进行超前预警等缺陷提供一种区域卸荷动力效应的边坡失稳超前预警监测方法。
3、本发明之第三目的是针对现有技术中,常规的监测手段无法对边坡失稳破坏现象进行超前预警等缺陷提供一种区域卸荷动力效应的边坡失稳超前预警监测装置的监测方法的电子设备。
4、为实现本发明之第一目的,本发明提供一种区域卸荷动力效应的边坡失稳超前预警监测装置,所述区域卸荷动力效应的边坡失稳超前预警监测装置,包括:
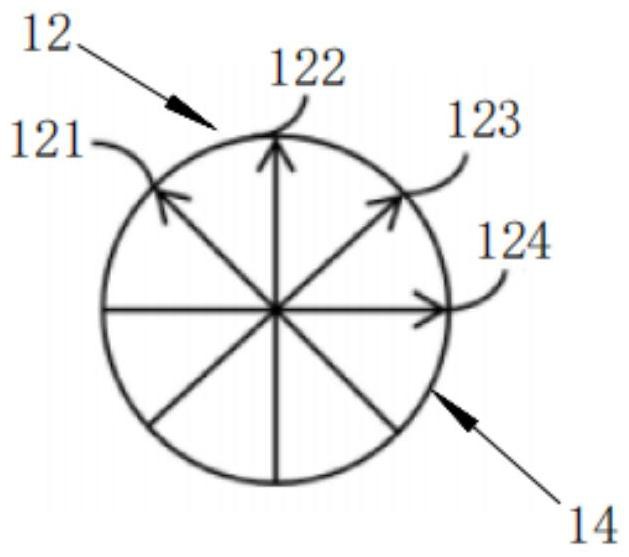
5、深井综合观测探头,设置在边坡预滑体以下深部岩体钻孔的底部,并进一步包括,钻孔分量式应变仪,设置在边坡预滑体以下的深部岩体,并用耦合介质将所述钻孔分量式应变仪与地层连为一体,用以监测深部岩体的钻孔孔壁径向位移;水平径向位移测微传感器,进一步包括间隔设置在钻孔分量式应变仪内的第一水平径向位移测微传感器、第二水平径向位移测微传感器、第三水平径向位移测微传感器,以及第四水平径向位移测微传感器;孔隙水压力计,设置在钻孔探头内,用于监测深部岩体孔隙水压力;水位气压辅助观测探头,设置在钻孔探头内,并用耦合介质将所述水位气压辅助观测探头与地层连为一体,用以自动测定并记录边坡预滑体以下的深部岩体之水位,并辅助孔隙水压力计监测深部岩体孔隙水压力;
6、采集仪,设置在边坡预滑体的地表,并通过设置在钻孔中的通讯电缆与所述深井综合观测探头电连接;
7、电动-发电型防雷隔离电源,设置在边坡预滑体的地表,用于给区域卸荷动力效应的边坡失稳超前预警监测装置供能;
8、可选地,所述水平径向位移测微传感器之第一水平径向位移测微传感器、第二水平径向位移测微传感器、第三水平径向位移测微传感器,以及第四水平径向位移测微传感器呈45°均匀布置。
9、为实现本发明之第二目的,本发明提供一种区域卸荷动力效应的边坡失稳超前预警监测装置的监测方法,所述监测方法,包括:
10、执行步骤s1:当边坡预滑体处于稳定阶段,即边坡预滑体底部抗剪力为静摩擦力;当边坡预滑体处于即将失稳阶段时,边坡预滑体底部抗剪力随着时间的进行,逐渐由静摩擦力向动摩擦力进行转换;边坡预滑体底部抗剪力为动摩擦力,在边坡处于即将失稳状态时,根据牛顿第三定律,对边坡预滑体进行正交分解得出垂直方向合力,于是对于边坡预滑体垂直方向产生荷载差;
11、执行步骤s2:根据卸荷作用得出的荷载差,通过集中荷载作用于半无限空间体表面并考虑埋深的mindlin解得出的应力解获得钻孔分量式应变仪位置处的原岩应力值和原岩应变值;
12、执行步骤s3:通过弹性力学小孔应力分析原理得出钻孔井壁四个方向的径向位移参数与孔隙水压力参数,即发生边坡失稳时所述钻孔分量式应变仪应变和所述钻孔分量式应变仪所处的孔隙水压力会发生突变,能对边坡失稳破坏现象起到超前预警的作用。
13、可选地,当边坡预滑体处于稳定阶段,即边坡预滑体底部抗剪力为静摩擦力时,边坡预滑体底部抗剪力与底部法向力之间成正比关系:
14、f稳=μ静n
15、其中:μ静为静摩擦力系数,f稳为静止状态下边坡预滑体底部抗剪力,n为边坡预滑体底部法向力。
16、可选地,在边坡预滑体处于稳定状态时,受力方程如下所示:
17、f1=μ1n1=μ1ma1cosα
18、n1=ma1cosα
19、其中,m为边坡预滑体质量,a1为边坡预滑体所处经纬度时的重力加速,μ1为静摩擦力系数,f1为静止状态下边坡预滑体底部抗剪力,n1为静止状态下边坡预滑体底部法向力;
20、边坡预滑体下方基岩表面在平衡稳定状态时,受力方程如下所示:
21、f1′=μ1n1′=μ1ma1cosα
22、n1′=ma1cosα
23、其中,f1′为静止状态下边坡预滑体下方基岩坡面所受剪力,n1′为静止状态下边坡预滑体下方基岩坡面所受法向力;
24、根据牛顿第二定律分析得出边坡预滑体下方基岩坡面受力方程:
25、f1-f1′=0
26、n1-n1′=0。
27、可选地,当边坡边坡预滑体处于即将失稳阶段时,边坡预滑体底部抗剪力随着时间的进行,逐渐由静摩擦力向动摩擦力进行转换,此时边坡预滑体底部抗剪力值位于:
28、f动≤f≤f稳。
29、可选地,当边坡预滑体处于失稳阶段,边坡预滑体底部抗剪力为动摩擦力,边坡预滑体底部抗剪力与底部法向力之间成正比关系:
30、f动=μ动n
31、其中:μ动为动摩擦力系数,f动为失稳状态下边坡预滑体底部抗剪力,n为边坡预滑体底部法向力。
32、可选地,边坡预滑体在即将失稳时,受力方程如下所示:
33、f2=μ2n2=μ2ma1cosα
34、n2=ma1cosα
35、其中,m为边坡预滑体质量,a1为边坡预滑体所处经纬度时的重力加速度,μ2为动摩擦力系数,f2为静止状态下边坡预滑体底部抗剪力,n2为静止状态下边坡预滑体底部法向力;
36、边坡预滑体下方基岩表面在即将失稳时,受力方程如下所示,
37、f2′=f1′
38、n2′=ma1 cosα
39、其中,f2′为即将失稳状态时边坡预滑体下方基岩坡面所受剪力,n2′为即将失稳状态时边坡预滑体下方基岩坡面所受法向力;
40、在边坡处于即将失稳状态时:
41、n2=n2′
42、根据牛顿第二定律,边坡预滑体下方基岩坡面受力方程如下
43、f2-f2′=m1a1=f3′
44、其中,m1为边坡预滑体失稳影响范围内岩体质量,a1为边坡预滑体下方基岩坡面加速度,f3′为边坡预滑体下方基岩坡面合力;
45、由此可得,
46、
47、根据牛顿第三定律,对边坡预滑体进行正交分解得出垂直方向合力,
48、f3=f3′
49、f3y=f3 sinα=m1a1 sinα
50、于是,对于边坡预滑体垂直方向产生荷载差,
51、δf=ma-f3y。
52、为实现本发明之第三目的,本发明提供一种区域卸荷动力效应的边坡失稳超前预警监测方法的电子设备,所述电子设备包括处理器和存储器,所述存储器中存储有至少一条指令,所述至少一条指令由所述处理器加载并执行以实现上述基于钻孔应变和孔隙水压力的边坡失稳预测方法。
53、综上所述,本发明区域卸荷动力效应的边坡失稳超前预警监测装置及方法所提出的边坡预滑体失稳变形卸荷作用时,对边坡预滑体失稳体下周围岩体所产生的附加应力值,可以有效的判别边坡预滑体所处的失稳演化阶段,进而可以实现由基于钻孔应变和孔隙水压力变化下的边坡预滑体失稳破坏超前预警。
本文地址:https://www.jishuxx.com/zhuanli/20240731/189010.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。