一种确定车辆类型和行驶方向的方法
- 国知局
- 2024-07-31 21:18:15
本发明涉及交通,尤其涉及一种确定车辆类型和行驶方向的方法。
背景技术:
1、车辆类型和行驶方向是智能交通管理和智能驾驶的关键,判断车辆类型和车辆行驶方向,能够确定不同方向及类型车辆流量,实现对不同类型车辆进行合理收费,准确地限制特定类型车辆通行,对逆行车辆进行处罚,实现行驶车辆的智能高效管控和检测。
2、图像方法检测车辆的类型。专利cn114724095a通过获取车辆图像训练样本集,训练车辆类型识别模型,获取待识别车辆图像对应的车辆类型信息。专利cn104361343b采集车辆图像,识别出感兴趣区域,提取车标和车脸特征对车辆类型进行归类。专利cn110147731a获取至少一帧包括目标车辆图像,目标车辆包括排气装置,确定目标车辆所属是否为非机动车类型。论文《基于注意力机制的改进vgg车辆类型识别研究》(农业装备与车辆工程,2022,60(08):82-87)基于车辆图像处理不同类别车辆型号的识别,专利cn116863412a利用高速公路场景中车辆顶视图像数据集,构建基于深度学习的车辆类型检测与识别。
3、激光以及毫米波雷达采集数据识别车辆类型。专利cn112906519b.获得数据采集场景中激光雷达采集的点数据,对所获得的点数据进行聚类,提取点云簇数据中点数据的特征,实现车辆类型识别。专利cn116359913a通过获取毫米波雷达信号,计算目标车辆的车首反射点\车尾反射点和待处理车轮反射点,计算目标车辆的车身长度,并对车轮反射点进行聚类分析,确定目标车辆的类型。专利cn117150391a在高速快路的两侧,预设间距设置若干个毫米波雷达或若干个激光雷达,利用毫米波雷达或激光雷达采集训练车辆的时序轨迹数据,输入构建好的识别模型确定车辆类型。
4、gps数据的多类型车辆分类。专利cn106650801a采用车载位置的gps数据,基于小汽车、小型货车和大型货车三类车辆的特征,运用支持向量机模型对这三类车辆进行自动分类。
5、振动和声波获取数据识别车辆类型。专利cn107730895b在路面结构体中设有振动传感光纤,其中包括一个或多个振动传感光纤传感段,各振动传感光纤传感段之间通过振动传感光纤过渡段连接,实现入式道路车辆类型识别系统和方法。专利cn116665697a在车运行过程中,获取车周围的声音数据,提取k个预设周期内声音数据对应的基频特征,计算基频特征序列与各种特种车辆声音模板特征序列的相关性,确定自车周围环境中是否存在特种车辆,实现对特种车辆的识别。专利cn112986915a采用至少两个声波信号,计算声波信号源相对于车辆的相对位置,对声波信号源进行定位。
6、总之,上述车辆类型和行驶方向识别的方法中,采用图像方法检查车辆类型,拍摄图像受到天气能见度的限制;使用激光雷达、毫米波雷达采集数据识别车辆类型,激光雷达、毫米波雷达为有源主动探测设备,不具有无源性,价格高且容易被发现;利用gps数据的多类型车辆分类方法中需要gps信号,容易受到干扰;采用振动和声波识别车辆类型,至少两个传感器数量,才能确定车辆行驶方向。
技术实现思路
1、针对现有技术的不足,本发明所要解决的技术问题是:提出一种确定车辆类型和行驶方向的方法。该方法利用单个声音记录仪,构建由若干张噪声梅尔频谱图组成的数据集,进而利用深度学习网络同时识别车辆类型和行驶方向。在实际道路的一侧,以规定的角度放置声音记录仪采集车辆噪声信号,以声音记录仪近邻的外行车道内法线为参照标记车辆行驶方向,以噪声梅尔频谱图训练和验证深度学习神经网络后,能够准确确定车辆类型和行驶方向,该方法能够在能见度低的场景中准确车辆类型和行驶方向,具有隐蔽性强、容易安装和造价低的特点。本发明克服了现有技术中采用图像或者视频识别受到雾霾天气可见度的影响,避免了使用毫米波雷达的有源信号隐蔽性差的缺陷,克服了对gps信号的依赖性,减少了声音记录仪数量,避免了多个声音记录仪位置调整和多个传感之间信息耦合的复杂性。
2、本发明解决该技术问题所采用的技术方案是:提供一种确定车辆类型和行驶方向的方法,具体步骤如下:
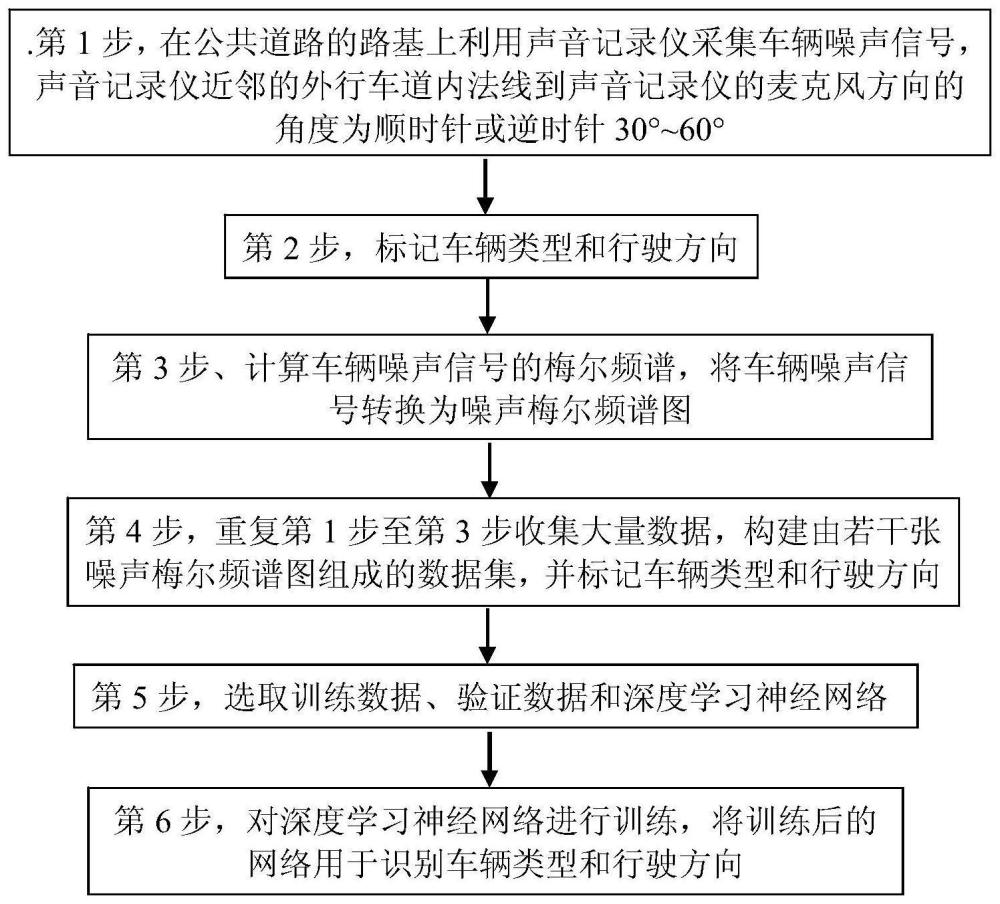
3、第1步,在公共道路旁边的路基上放置声音记录仪,声音记录仪近邻的外行车道内法线到声音记录仪的麦克风方向的角度为顺时针或逆时针30°~60°,利用声音记录仪采集车辆噪声信号;
4、公共道路选择范围包括城乡公路和高速公路等,将三角架放置在公共道路旁边的路基上,声音记录仪水平放置在三角架上,声音记录仪近邻的外行车道内法线到声音记录仪的麦克风方向的角度为顺时针或逆时针30°~60°,以声音记录仪近邻的外行车道内法线到声音记录仪的麦克风方向的角度逆时针为正,顺时针为负;采集同一组车辆噪声信号时,声音记录仪近邻的外行车道内法线到声音记录仪的麦克风方向的角度不变;
5、当车辆接近声音记录仪时开始记录车辆噪声,随着车辆逐渐靠近再远离声音记录仪,声音记录仪接收到的噪声信号逐渐增强,达到最大值后逐渐减弱,直至车辆远离声音记录仪,声音记录仪停止采集;将车辆之间相互没有明显重叠的噪声信号作为采集到的车辆噪声信号;
6、第2步,标记车辆类型和行驶方向;
7、以声音记录仪近邻的外行车道内法线为参照标记车辆行驶方向,将车辆由左向右行驶标记为lr,车辆由右向左行驶标记为rl;需要识别的车辆类型包括轿车、公共汽车、面包车、三轮电动车.....;车辆类型和行驶方向之间用“_”分开,将采集到的车辆噪声信号保存为“车型_行驶方向_序号.wav”文件,即对道路上行驶车辆的类型和行驶方向分别进行标记,并对采集到的车辆噪声信号进行编号,例如:“car_lr_1.wav”文件表示由左向右行驶轿车的第一个噪声数据,“car_rl_1.wav”文件表示由右向左行驶轿车的第一个噪声数据;标记其它车辆类型和行驶方向与此相同;
8、第3步,计算车辆噪声信号的梅尔频谱,将车辆噪声信号转换为噪声梅尔频谱图;
9、将车辆噪声信号经过快速傅里叶变换转换到频域,再由公式(1)得到梅尔频率;
10、
11、公式(1)中,fmel为梅尔频率,f为车辆噪声信号的频率;
12、采用梅尔频率滤波器组对梅尔频谱进行滤波,梅尔频率滤波器组是一类具有非线性分布的滤波器组,其在低频区域分布密集,而在高频区域分布稀疏,这样分布的目的是为了更好得满足人耳听觉特性;梅尔频率滤波器组由多个三角滤波器组成,三角滤波器的传递函数定义如公式(2)所示:
13、
14、公式(2)中fm的定义为:
15、
16、公式中,m是三角滤波器的数量,也被称为梅尔频率滤波器组的阶数,阶数的值是根据信号的截止频率确定的,通常取值为24;fm-1、fm和fm+1分别为第m个三角滤波器的起始点频率、中间点频率和结束点频率,fl和fh是三角滤波器频率范围内的最低频率和最高频率,g是快速傅里叶变换的长度,fs为采样频率,为fmel的逆函数;
17、计算对数能量,在动态范围内对梅尔频谱进行压缩,并将对数能量q(m)作为滤波器的输出,计算公式(4)如下:
18、
19、其中,e(k)为梅尔频谱转换得到的能量谱;
20、第4步,重复第1步至第3步收集大量数据,构建由若干张噪声梅尔频谱图组成的数据集,每张噪声梅尔频谱图都标记了车辆类型和行驶方向;
21、深度学习神经网络需要大量的训练样本,固定声音记录仪方位,采集不同车辆类型和行驶方向下的车辆噪声信号,将车辆噪声信号转换成噪声梅尔频谱图,并保存在含车辆类型和行驶方向的文件夹中,例如,由左向右行驶的轿车的噪声梅尔频谱图保存在mel_car_lr文件夹中,由右向左行驶的轿车的噪声梅尔频谱图保存在mel_car_rl文件夹中。按照同样方法得到其他类型车辆的噪声梅尔频谱图,每种类型车辆及每个行驶方向至少包括100张的噪声梅尔谱图,以满足深度学习神经网络的训练和验证要求。
22、第5步,选取训练数据、验证数据和深度学习神经网络;
23、在已经制备的数据集中,按照8:2的比例选择训练样本和验证样本,并通过加噪和遮挡等方式对各个样本的噪声梅尔频谱图进行数据增强;选择典型深度学习网络作为识别车辆类型和行驶方向的模型,典型深度学习网络包括:vgg-16、google net、resnet、shuffile net、squeeze net、dense net、mobile net等,在保证准确率下选择轻量级深度学习神经网络,有利于减少训练时间,提高识别速度。
24、第6步,对深度学习神经网络进行训练,将训练后的深度学习神经网络用于识别车辆类型和行驶方向;
25、设定深度学习神经网络参数,利用训练样本对深度学习神经网络进行训练,输出训练平均准确率,并用验证样本验证其平均准确率,当训练平均准确率和验证平均准确率不再随训练轮次增加而增加时,停止训练深度学习神经网络,将训练后的深度学习神经网络作为识别车辆类型和行驶方向的模型,进而可以用于车辆类型和行驶方向的识别。
26、与现有技术相比,本发明的突出的实质性特点和显著进步如下:
27、(1)相比采用截取视频以及照相机拍照获得图像识别车辆类型的方法,采集图像容易受到环境可见度的限制,本发明方法采用车辆噪声不会受到可见度的影响,在光照度低的场景中无需补光,仍然能够识别出汽车类型和行驶方向。利用单张图像只能识别车辆类型,不能识别车辆正向与反向行驶,本发明能够识别车辆的两个行驶方向。
28、(2)相比采用激光雷达、毫米波雷达,本发明采用声音记录仪录制车辆噪声信号来识别车辆类型和行驶方向,使用设备造价低,隐蔽性好。相比采用gps方法获取车辆类型,本发明不受gps信号的限制。
29、(3)相比振动传感光纤传检测车辆类型方法,本发明采用录音笔、手机等作为声音记录仪,采集车辆噪声信号的设备更简单、普遍。相比现有使用车辆声音识别车辆类型的方法,本发明在没有增加设备和识别方法的基础上,能够同时识别车辆类型和车辆行驶方向。相比现有使用多个声音传感器采集车辆声音识别车辆类型和位置的方法,本发明只使用一个声音记录仪即可同时识别车辆类型和行驶方向。
30、(4)本发明采用在公共道路旁边的路基上放置声音记录仪,声音记录仪偏离近邻外行车道内法线一定角度采集车辆噪声信号,制备包含车辆类型和行驶方向在内的数据集,相比只包括车辆类型的声音数据集,本发明包含信息更全面。
31、(5)本发明采用在公共道路旁边的路基上放置声音记录仪,声音记录仪偏离近邻外行车道内法线一定角度采集车辆噪声信号,利用了行驶车辆噪声的方向性和声音记录仪的方向性,在相同噪声强度下,车辆在偏向声音记录仪方向行驶时,记录仪记录的噪声要大于车辆背向声音记录仪行驶记录的噪声。
32、(6)本发明采用在公共道路旁边采集车辆噪声,适应于双向车道向前行驶车辆类型和行驶方向的检测,同样适应于单行道上逆行车辆类型和行驶方向的检测。
33、(7)本发明一种识别车辆类型和行驶方法,同样可以推广河流通道中水面船只等交通工具的类型和行驶方向的识别,具有通用性。
本文地址:https://www.jishuxx.com/zhuanli/20240731/189180.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表