一种交通检测系统及方法与流程
- 国知局
- 2024-07-31 21:20:21
本发明涉及交通管理,尤其涉及一种交通检测系统及方法。
背景技术:
1、目前,高速公路出行主要面临的两大痛点是安全和拥堵,造成安全和拥堵的原因是道路设计和规划不合理,不能满足出行要求,以及车辆行驶速度不一致,导致交通流不畅,及时对交通进行实时管理,可以有效减缓拥堵问题和安全问题,实时交通管理需要结合实时道路交通情况以及车辆信息进行处理后,得到有效的管理方案,这也对于交通数据的处理提出了更高的要求,并且采集数据数量级的陡加,对各种交通数据价值挖掘不足、缺乏足够的数据分析和预测能力,无法准确预测交通拥堵、事故发生等突发情况,影响了交通管控和应急处理的及时性和有效性,影响了后续对于交通预测以及及时制定实时交通管理方案都至关重要。并且各种交通数据之间是存在关联性的,相互影响,共同作用最终的交通检测结果,根据不同需求,需要采集不同类型的交通数据,导致交通检测中需要的各类交通数量大,更是缺乏对各类交通数据之间关联性的有效分析进而影响了后续的实时状态风险评估,以及多平台协调控制。
技术实现思路
1、为了克服上述现有技术中高速公路管理中缺乏对交通数据之间关联性的有效分析造成后续的实时状态风险评估、以及多平台协调控制的缺点。本发明的主要目的在于提供一种交通检测系统及方法。
2、为达到上述目的,本发明采用以下技术方案,一种交通检测方法,包括以下步骤:
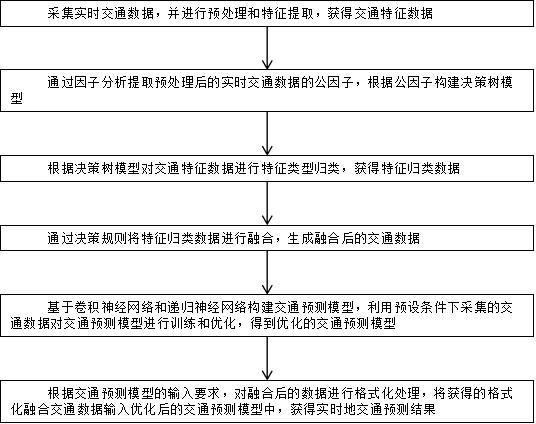
3、采集高速公路的实时交通数据,并进行预处理和特征提取,获得交通特征数据;
4、通过因子分析提取预处理后的交通特征数据的公因子,根据提取到的公因子构建决策树模型;
5、根据决策树模型对交通特征数据进行特征类型归类,获得特征归类数据;
6、通过决策规则将所述特征归类数据进行融合,生成融合后的交通数据;
7、将融合后的交通数据输入构建的交通预测模型中,获得实时交通预测结果。
8、所述将融合后的交通数据输入构建的交通预测模型中,获得实时交通预测结果,包括以下步骤:
9、基于卷积神经网络和递归神经网络构建交通预测模型,利用预设条件下采集的交通数据对交通预测模型进行训练和优化,得到优化的交通预测模型;
10、根据交通预测模型的输入要求,对融合后的交通数据进行格式化处理,将获得的格式化融合交通数据输入优化后的交通预测模型中,获得实时的交通预测结果。
11、所述通过因子分析提取预处理后的实时交通数据的公因子包括以下步骤:
12、对预处理后的实时交通数据进行标准化处理,获得标准化后的实时交通数据;
13、计算标准化后的实时交通数据之间的协方差矩阵,确定潜在因子数,通过解释方差贡献率、kaiser准则、scree图,确定因子数;
14、通过最大似然估计处理标准化后的实时交通数据,获得因子载荷矩阵和特征值,并对因子载荷矩阵进行旋转,根据特征值,确认公因子及公因子含义。
15、所述通过决策规则将特征归类数据进行融合,生成融合后的交通数据,包括以下步骤:
16、根据决策树模型的输出,设计融合规则;
17、根据历史交通数据分析,确定特征归类数据的权重;
18、对特征归类数据进行标准化处理,获得尺度和量级一致的标准化特征归类数据;
19、根据确定的融合规则和特征权重对标准化特征归类数据处理,获得融合特征数据;
20、通过主成分分析对融合特征数据进行降维处理,获得降维融合后的交通数据。
21、所述交通数据包括车流量数据、车辆类型数据、车速数据、交通事故数据以及道路条件数据。
22、所述交通数据的采集包括以下步骤:
23、根据设置在道路两侧的图像采集设备,实时获取车辆图像数据;
24、对实时图像进行预处理,包括去噪、图像增强,获得有效图像数据;
25、有效图像数据通过目标检测算法识别实时图像中的车辆,获得车辆类型数据;其中,对有效图像数据进行边界处理,通过实例分割网络,识别和分割图像中的个体对象,确认每个对象的精准边界,获取准确的车辆信息;
26、通过目标跟踪在连续的图像帧中追踪车辆,获得车辆的运动轨迹、车流量数据;
27、根据纹理特征、边缘检测以及形状特征对有效图像数据进行特征提取,获得道路条件数据;
28、基于时间序列,对车辆类型数据以及道路条件数据进行整合,获得实时交通数据。
29、所述目标跟踪包括:
30、通过卡尔滤波算法kalmanfilter,用于预测和校正目标车辆的位置;再结合匈牙利算法,利用目标跟踪算法,进一步实现目标关联;其中,所述目标跟踪算法包括以下步骤:
31、通过yolo-v5从视频帧中提取目标车辆的位置信息;
32、对每个检测到的目标车辆初始化一个轨迹;初始化包括为目标分配一个唯一的id,并记录其初始位置和其他相关信息;
33、基于目标车辆的当前速度和运动模型,对每个目标车辆的轨迹进行预测,推断目标车辆在下一个时间步的位置;
34、将当前检测到的目标与先前帧中的轨迹利用匈牙利算法进行关联;
35、根据关联结果,更新目标车辆的轨迹信息;
36、定期删除失效的轨迹,以确保系统不会持续跟踪不再存在的目标。
37、所述交通预测结果中高风险区域和时段进行预警标识包括:
38、根据业务理解构造新的特征,其中,根据时间生成是否为高峰时段的标识、根据天气条件判断是否不利于驾驶的标识;
39、利用随机森林算法降低构造的特征的维度,并采用逐步回归方法来剔除对交通预测模型中对预测贡献无关以及线性关系低的特征。
40、所述采集高速公路的实时交通数据包括:图像采集设备、地磁传感器、激光雷达、红外线传感器、设置在车辆上的无线通信设备;
41、所述图像采集设备采集车辆图像;所述地磁传感器获取车流量,所述激光雷达通过发送激光束并测量其反射来获取车辆的位置和运动信息,所述红外线传感器用于检测车辆的存在,记录车流量数据,所述无线通信设备与道路设备通信,实时获取车辆信息,包括数量、速度以及行驶方向。
42、一种交通检测系统,包括:
43、数据采集模块,用于进行预处理和特征提取,获得交通特征数据;
44、数据处理模块,通过因子分析提取预处理后的实时交通数据的公因子,根据公因子构建决策树模型;根据决策树模型对交通特征数据进行特征类型归类,获得特征归类数据;通过决策规则将特征归类数据进行融合,生成融合后的交通数据;
45、模型构建模块,基于卷积神经网络和递归神经网络构建交通预测模型,利用预设条件收集的交通数据对交通预测模型进行训练和优化,得到优化的交通预测模型;
46、预测模块,根据交通预测模型的输入要求,对融合后的交通数据进行格式化处理,将获得的格式化融合交通数据输入优化后的交通预测模型中,获得实时地交通预测结果,将实时地交通预测结果传输至交通数据共享平台,并对交通预测结果中高风险区域和时段进行预警标识,将预警标识通过在高速上的警示装置提示。
47、与现有技术相比较,本发明的有益效果为:本发明中实现了实时交通数据采集:通过多种传感器和设备,能够实时获取车辆的各种数据,并对数据预处理和融合:对采集到的实时交通数据进行预处理和特征提取,根据因子分子提取交通特征数据的公因子,找到交通数据之间的关联性,并根据公因子构建决策树,对交通特征数据进行归类,得到多种类型的交通数据,然后进行数据融合,以便后续处理和分析,以及交通预测模型构建和优化:利用卷积神经网络和递归神经网络等深度学习模型构建交通预测模型,通过预设条件收集的交通数据进行训练和优化,以提高预测准确性和泛化能力。将融合后的交通数据输入预训练好的交通预测模型中,能够实时地获得交通预测结果,并对高风险区域和时段进行预警标识,及时提示驾驶人员注意安全。能够实时采集、处理和预测交通数据,及时反馈交通状态和预警信息,提高了高速公路的交通管理的效率和及时性。通过深度学习模型和目标检测跟踪算法,能够准确识别车辆、预测交通状况,提高了预测结果的准确性。通过融合多种数据源和采集设备,能够获取更全面、更丰富的交通数据,为交通预测提供更全局的视角和更丰富的信息。并且通过预警标识和提示装置,能够及时提醒驾驶人员注意高风险区域和时段,并及时调整行车速度与车道,提高了交通安全性和驾驶体验。
本文地址:https://www.jishuxx.com/zhuanli/20240731/189318.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。