一种城市道路交通流量感知预测方法及其系统
- 国知局
- 2024-07-31 21:27:59
本发明涉及一种城市道路交通流量感知预测方法及其系统,属于智能交通和软件系统领域。
背景技术:
1、随着智能交通系统断积累多源交通数据,数据驱动的交通预测受到广泛关注,准确的方法在交通信号控制、交通路线引导等许多相关应用中具有重要意义。数据已经变成智能交通的核心,如何高效地从海量数据中分析、挖掘所需的信息和规律,结合已有经验和数学模型等生成更高层次的决策支持信息,获得各类分析、评价数据,为交通诱导、交通控制、交通需求管理、紧急事件管理等提供决策支持,为交通管理者、运营者和个体出行者提供交通信息,成为当务之急。
2、交通预测的目标是预测未来固定时间步长的交通状况(例如车流)。一般来说,交通状况受区域路网和历史交通状况的影响。一方面,区域路网的传感器具有特殊的空间相关性。在交通规则的约束下,路网空间呈现出非欧几何结构。另一方面,交通状况的时间序列数据具有波动性,各种交通事件和一些特殊事件(如节日)的发生将进一步影响交通状况的稳定性。具有复杂时空依赖性的不确定交通模式和长期预测的固有困难将降低交通预测的准确性。
3、数据驱动的交通流量感知预测方法的两个主要代表是经典统计和机器学习。经典统计的平稳假设(例如自回归积分移动平均)不适用于长期流量预测。至于机器学习,现有工作依赖于图卷积神经网络和循环神经网络来整合空间和时间域上的信息。然而,图卷积神经网络可能会被错误的道路拓扑图结构误导,而基于循环神经网络的方法计算量大,对长期序列建模的能力有限。提高交通预测准确性的直接方法是部署使用多头自注意力机制的变换器模型来描述长期序列中交通数据的时间依赖性或每个时间步中交通传感器之间的空间依赖性。但是,之前的工作表明,变换器比卷积神经网络需要更多的训练数据。对于这个问题,自监督预训练已被证明是有效的。
技术实现思路
1、本发明提供了一种城市道路交通流量感知预测方法及其系统,为智能交通系统提供深度数据挖掘方法,使其能从所累积的海量交通数据不断学习城市道路的交通模式和交通规律。
2、为实现上述目的,本发明第一方面,提出一种城市道路交通流量感知预测方法,具体包括以下步骤:
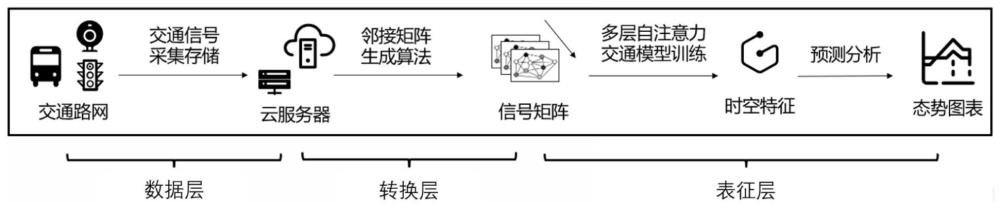
3、s100、构建系统框架,其中,数据层位于交通流量感知预测系统框架的底层,转换层是沟通数据层和表征层的中介层,表征层位于系统框架顶层,由数据驱动对城市道路交通模式进行归纳;
4、s200、构建城市道路交通流量数仓,它可以为后续模块提供数据采集、存储等基础服务;
5、s300、构建交通流量数据转换系统,将城市道路网络空间信息转换为易于表征层模型接收处理的高维矩阵;
6、s400、构建交通流量感知预测模型,该模型时空掩码模块、由路网络空间编码器、交通序列时间编码器、时空特征解码器和特征聚合器构成,它可以从数据中提取道路交通模式;
7、s500、训练交通流量感知预测模型,模型利用基于掩码学习的预训练提高对于城市道路交通流量的时空表征能力,并通过微调最终实现对城市道路交通态势的感知和预测。
8、进一步地,所述步骤s200构建城市道路交通流量数仓,包括部署基于城市道路节点的交通流量监测系统、部署基于云服务器的交通流量数据存储系统。
9、进一步地,对于转换层,道路空间信息和高维数据矩阵的转换过程,所述步骤s300具体包括以下步骤:
10、s301、计算城市道路网络各个节点交通流量监测设备之间的路网距离:
11、dij=(xi-xj)2+(yi-yj)2
12、其中,dij表示交通流量监测设备i,j之间的距离;
13、s302、以交通流量监测设备为图结点,使用阈值高斯核函数生成邻接矩阵:
14、
15、其中,wij表示监测设备i,j的边权,σ是距离标准差,k是阈值。
16、进一步地,对于表征层,交通流量感知预测模型的预训练过程,所述步骤s400具体包括以下步骤:
17、s401、对输入数据执行空间掩蔽,在每个时间步中随机屏蔽固定数量的传感器节点,被屏蔽的传感器节点被替换为可学习的嵌入es,所有传感器节点都输入到编码器;
18、s402、对输入数据执行时间掩蔽,输入序列的某些时间步长被随机屏蔽,掩码时间步长被替换为可学习的嵌入et,为了提高计算效率,只有未屏蔽的步骤被输入到时间编码器,相反,未屏蔽步骤和et的串联被输入到解码器以重建原始序列;
19、s403、构建道路网络空间编码器,路网空间编码器旨在动态捕捉道路网络的特征,并描述空间域中每个时间步长的差异,使用多层感知机作为主干网络,以便允许模型以更少的计算预算实现相同的性能,给定一个空间掩码序列,路网空间编码器应用多层核大小等于1的一维卷积来提取空间特征,也就是说,流量序列中的每个时间步独立地输入到共享权重的多层感知机;
20、s404、构建交通序列时间编码器,交通序列时间编码器旨在从不同时间步长的交通状况变化中捕获时间特征,由于由大量传感器节点组成的道路网络内的空间信息被提取为空间特征,减少了计算开销,因此允许使用自注意力机制来处理不相邻的时间步之间的信息;
21、s405、构建时空特征解码器,时空特征解码器旨在从编码器提取的时空特征中重建原始序列,之后,解码器将恢复屏蔽的传感器节点,并在每两个未屏蔽的时间步长之间填充缺失的流量条件,恢复序列与原始序列的误差计算如下:
22、
23、均值err被反向传播以在预训练阶段优化整个编码器的参数;
24、s406、构建特征聚合器,特征聚合器能够整合由时空编码器提取的特征。
25、进一步地,所述步骤s401中,编码器对所有传感器节点之间的空间依赖性进行建模,并利用解码器恢复被掩蔽的节点,虽然每个时间步的掩码节点数是固定的,但掩码节点的索引在不同的时间步是不同的,空间编码器的输入表示为:
26、
27、进一步地,所述所述步骤s402中,时间编码器对原始序列中可能不相邻的未屏蔽时间步长之间的时间依赖性进行建模,空间编码器的输入表示为:
28、
29、进一步地,所述步骤s405中,解码器的输入表示如下:
30、fst=f′st∪{et:n∈tm}k。
31、进一步地,所述步骤s406中,使用门控时间卷积网络作为ffm的骨干网络,该网络利用跨步一维时间卷积对时空特征进行汇聚融合,它将序列中t个时间步长融合为一个,值得注意的是,需要将卷积步幅设置为t,防止两个卷积操作重叠,卷积块的堆叠最终实现了时空特征的融合。
32、进一步地,模型训练包括预训练和微调两个阶段,所述步骤s500具体包括以下步骤:
33、s501、在预训练阶段,为了降低优化难度,提出了交通掩码建模自监督预训练任务,该任务通过重建被掩蔽的交通序列数据对道路网络空间编码器和交通序列时间编码器的参数进行优化,损失函数定义如下:
34、
35、s502、在微调阶段,预训练的编码器道路网络空间编码器和交通序列时间编码器被加载到模型中,对特征聚合器进行随机初始化,并且三者针对交通态势预测任务进行微调,输入序列将经过以上三个模块以获得最终输出,损失函数定义如下:
36、
37、基于相同的技术构思,本发明第二方面,提供一种城市道路交通流量感知预测系统,包括数据层、转换层、表征层,所述数据层的数据用于执行本发明第一方面所述的城市道路交通流量感知预测方法。
38、本发明一种城市道路交通流量感知预测方法及其系统,该系统的基本组件包括数据层、转换层、表征层。其中,表征层模型由道路网络空间编码器、交通序列时间编码器和特征融合模块组成。道路网络空间编码器旨在捕获单个时间步内的空间依赖性。交通序列时间编码器用于捕获序列数据的时间依赖性。特征融合模块集成了时空特征来预测交通状况。同时,针对模型训练,本发明提出了一种新的参数优化策略,将优化过程分为预训练阶段和微调阶段。在预训练阶段,随机屏蔽了序列数据,构建了一个空间-时间自监督的预训练任务,称为掩码交通建模,其目的是重建被破坏的交通序列数据,为模型提供更好的初始化。在微调阶段,预训练的自动编码器与特征聚合器相结合,通过使用整个交通序列作为输入,重新训练以预测交通状况。此外,使用多层感知器作为道路网络空间编码器中图卷积神经网络的辅助工具,以减少错误图结构的影响。此外,扩张卷积被引入到特征聚合器中,以扩大感受野,同时整合时空特征。
39、相比于现有技术,本发明至少具有如下优点:
40、1.将预训练技术引入交通路网建模,提出自监督预训练任务以更好的捕获时空相关性,提高交通预测精度;
41、2.简化每个模块的责任,显著降低参数优化难度,在道路网络空间编码器中,以多层感知机辅助图卷积神经网络作为空间特征提取器,此外,在交通序列时间编码器中,引入时间下采样策略,利用空洞卷积扩大时间卷积网络的时间感受野,并且缓解计算负担;
42、3.与其它方法相比,使的方法在两个基准上做到以更少的参数和更小的计算预算实现高性能。
本文地址:https://www.jishuxx.com/zhuanli/20240731/189649.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表