一种防止无人集卡碰撞港机设备的方法及系统与流程
- 国知局
- 2024-07-31 21:28:47
本申请涉及无人集卡,尤其涉及一种防止无人集卡碰撞港机设备的方法及系统。
背景技术:
1、随着科技的发展,无人集卡被广泛应用于港口、工业园区等场景。但在实际作业的过程中,港口的港机设备会根据位置进行移动,在移动过程可能会存在与无人集卡发生碰撞的风险,如图4所示。目前港口的避碰策略是仅依靠传感器和车辆本体的局部避障功能,但港口地理环境较为复杂,温度、盐雾较大,整体自然环境相对较差,对各类传感器精度影响很大;设备表面灰尘杂物、安装精度、码头作业震动等因素也会影响设备的正常工作,并且仅依靠传感器和车辆本体的局部避障功能,不能快速,准确识别正在移动的港机,会有碰撞风险,而且现场可能因为天气,温度等情况会造成传感器雷达相应延迟,造成碰撞事故。
技术实现思路
1、有鉴于此,本发明提供一种防止无人集卡碰撞港机设备的方法及系统,以解决现有技术中无人集卡在天气恶劣等情况下,无法避开港机设备,导致碰撞的技术问题。
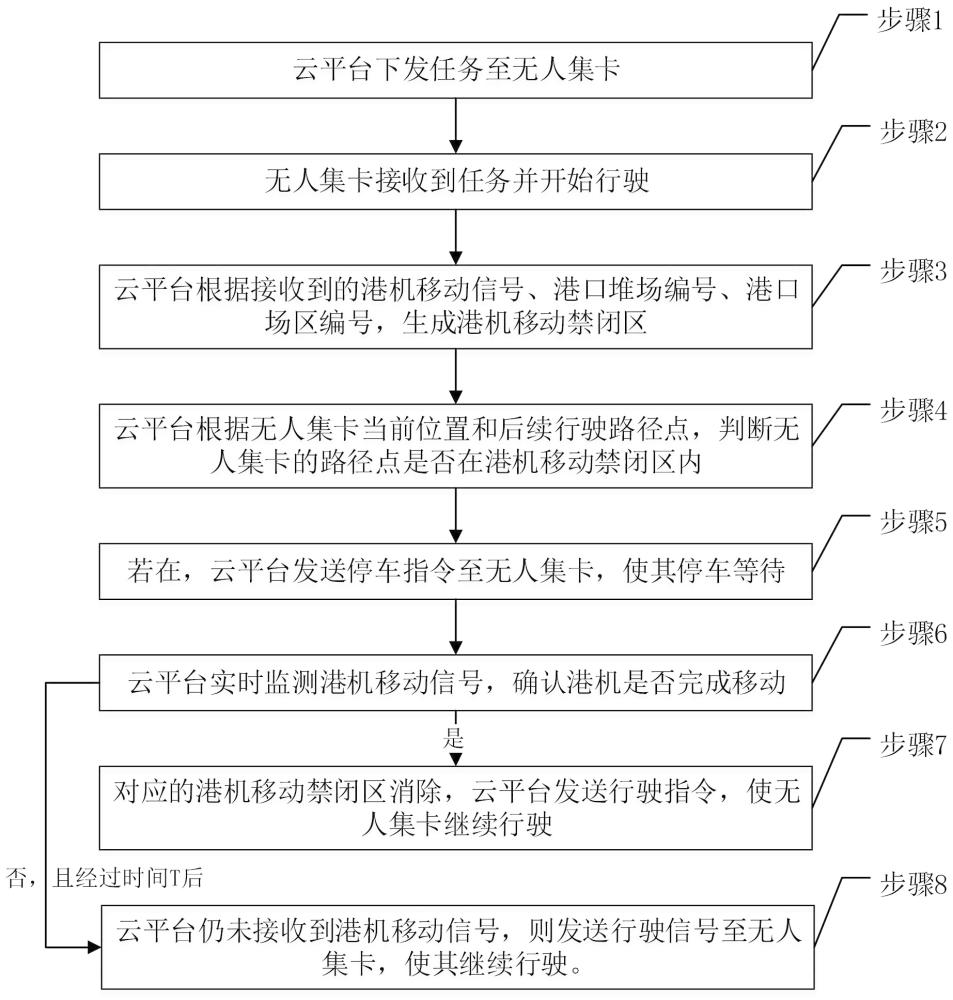
2、本发明提供一种防止无人集卡碰撞港机设备的方法,应用于港口,所述方法包括:步骤1,云平台下发任务至无人集卡;步骤2,无人集卡接收到任务并开始行驶;步骤3,云平台根据接收到的港机移动信号、港口堆场编号、港口场区编号,生成港机移动禁闭区;步骤4,云平台根据无人集卡当前位置和后续行驶路径点,判断无人集卡的路径点是否在港机移动禁闭区内;步骤5,若在,云平台发送停车指令至无人集卡,使其停车等待;步骤6,云平台实时监测港机移动信号,确认港机是否完成移动;步骤7,若港机完成移动,则对应的港机移动禁闭区消除,云平台发送行驶指令,使无人集卡继续行驶。
3、进一步的,所述港口包括多个场区,每个场区包括多个堆场。
4、进一步的,所述港机移动信号包括港机水平移动方向和港机垂直移动方向。
5、进一步的,所述步骤3包括:步骤31,云平台根据接收到的港机水平移动方向,获取相邻堆场编号;步骤32,云平台根据接收到的港机垂直移动方向,获取所在场区编号;步骤33,通过港机当前所在场区主干道两侧相邻堆场的顶点坐标生成港机移动禁闭区。
6、进一步的,所述场区主干道为港机移动时经过的主干道。
7、进一步的,所述方法还包括:步骤8,当经过t时间后,云平台仍未接收到港机移动信号,则发送行驶信号至无人集卡,使其继续行驶。
8、进一步的,所述后续行驶路径点为无人集卡行驶路径后续30米路径点。
9、本发明还提供一种防止无人集卡碰撞港机设备的系统,所述系统包括:云平台,用于下发任务至无人集卡,根据接收到的港机移动信号、港口堆场编号、港口场区编号,生成港机移动禁闭区,根据无人集卡当前位置和后续行驶路径点,判断无人集卡的路径点是否在港机移动禁闭区内,若在,则发送停车指令至无人集卡,使其停车等待,当港机完成移动,对应的港机移动禁闭区消除时,发送行驶指令,使无人集卡继续行驶;无人集卡,通过网络与云平台相连,用于接收云平台下发的任务并开始行驶,接收云平台发出的停车指令并停车等待,接收云平台发出的行驶指令并继续行驶;港机,通过应用程序与云平台相连,用于通过应用程序上报港机移动信号至云平台。
10、进一步的,所述所述云平台还用于,当经过t时间后仍未接收到港机移动信号,则发送行驶信号至无人集卡。
11、进一步的,所述港口包括多个场区,每个场区包括多个堆场。
12、本发明提供一种防止无人集卡碰撞港机设备的方法及系统,该技术方案根据港机移动的线路,生成临时禁闭区,无人集卡到达该区域前停车等待,待禁闭区消除时继续行驶。该方案不依赖于车辆传感器和车辆本体的局部避障功能,即使在恶劣天气环境下,也能通过云平台下发的指令,避开港机设备,避免由于天气等情况导致的碰撞,提高作业效率。
技术特征:1.一种防止无人集卡碰撞港机设备的方法,应用于港口,其特征在于,所述方法包括:
2.根据权利要求1所述一种防止无人集卡碰撞港机设备的方法,其特征在于,所述港口包括多个场区,每个场区包括多个堆场。
3.根据权利要求1所述一种防止无人集卡碰撞港机设备的方法,其特征在于,所述港机移动信号包括港机水平移动方向和港机垂直移动方向。
4.根据权利要求3所述一种防止无人集卡碰撞港机设备的方法,其特征在于,所述步骤3包括:
5.根据权利要求4所述一种防止无人集卡碰撞港机设备的方法,其特征在于,所述场区主干道为港机移动时经过的主干道。
6.根据权利要求1所述一种防止无人集卡碰撞港机设备的方法,其特征在于,所述方法还包括:
7.根据权利要求1所述一种防止无人集卡碰撞港机设备的方法,其特征在于,所述后续行驶路径点为无人集卡行驶路径后续30米路径点。
8.一种实现权利要求1-7所述防止无人集卡碰撞港机设备的方法的系统,其特征在于,所述系统包括:
9.根据权利要求8所述一种防止无人集卡碰撞港机设备的系统,其特征在于,所述所述云平台还用于,当经过t时间后仍未接收到港机移动信号,则发送行驶信号至无人集卡。
10.根据权利要求8所述一种防止无人集卡碰撞港机设备的系统,其特征在于,所述港口包括多个场区,每个场区包括多个堆场。
技术总结本发明提供一种防止无人集卡碰撞港机设备的方法,应用于港口,所述方法包括:步骤1,云平台下发任务至无人集卡;步骤2,无人集卡接收到任务并开始行驶;步骤3,云平台根据接收到的港机移动信号、港口堆场编号、港口场区编号,生成港机移动禁闭区;步骤4,云平台根据无人集卡当前位置和后续行驶路径点,判断无人集卡的路径点是否在港机移动禁闭区内;步骤5,若在,云平台发送停车指令至无人集卡,使其停车等待;步骤6,云平台实时监测港机移动信号,确认港机是否完成移动;步骤7,若港机完成移动,则对应的港机移动禁闭区消除,云平台发送行驶指令,使无人集卡继续行驶。该技术方案用于解决现有技术中无人集卡在天气恶劣等情况下,无法避开港机设备,导致碰撞的技术问题。技术研发人员:安哲文,骆嫚,赵威受保护的技术使用者:东风悦享科技有限公司技术研发日:技术公布日:2024/7/29本文地址:https://www.jishuxx.com/zhuanli/20240731/189686.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表