停车场自动缴费方法及系统与流程
- 国知局
- 2024-07-31 21:53:35
本发明涉及停车管理,具体为停车场自动缴费方法及系统。
背景技术:
1、停车场作为目前城市不可或缺的公共场所,为大量的汽车提供了安全合理的停车空间,而随着汽车的日益剧增,单层停车场已经无法满足目前的汽车需求,因此大量多楼层停车场出现,这种多楼层的立体停车场的出现大幅增加了公共停车位,满足了目前日益增长的停车需求。
2、目前停车场主要是采取时间收费制度进行自动缴费,通常停车场自动缴费方法是结合etc系统计算停车时间并根据当前车辆变化进行自动缴费。但是对于多层停车场而言,目前etc系统得到的进出地下停车场的时间收费计费标准较为单一,由于多层停车场的层数停车位要远多于单层停车场,车主在寻找停车位的过程相比于单层停车场寻找停车位的过程需要花费更多的时间,因此这些时间的时间缴费计算应该与停车缴费时间计算区分开来。
3、为此,提出停车场自动缴费方法及系统。
技术实现思路
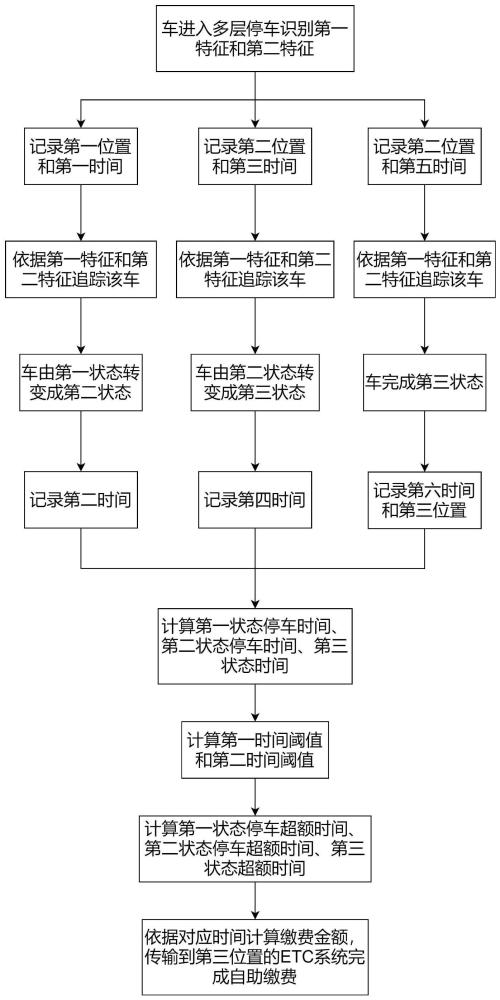
1、本发明的目的在于提供停车场自动缴费方法及系统,通过摄像头识别当前多层停车场入口处车的车牌特征和车自身特征,通过特征让摄像头追踪并向系统传输数据自动计算车驶入车泊位前、车泊位停车时和离开车泊位到出口的三个阶段的时间和停车时所处楼层,依据三个阶段的时间自动计算该车所花费的停车缴费金额,依据摄像头识别的该车所处入口、车泊位和出口位置计算该车驶入车泊位前和离开车泊位到车出口的时间阈值,依据三个阶段的时间阈值和对应的花费时间判断是否有人因为各种原因过度占用公共停车通道,并对其超出部分自动计算额外缴费金额,在车驶出出口时,通过摄像头获取车状态和所处位置,系统将缴费金额和额外缴费金额进行计算并发送给对应位置的etc系统进行自动缴费。
2、为实现上述目的,本发明提供如下技术方案:
3、停车监控模块,当入口处摄像头监控到有车进入停车场后,通过摄像头将所述车辆的图片数据传输到系统分析所述车辆的第一特征和第二特征,所述摄像头依据所述第一特征和所述第二特征追踪所述车辆状态进行缴费计时;
4、所述第一特征为车牌号特征,所述第二特征为车形状颜色特征;
5、进一步地,所述第一特征和所述第二特征由车辆特征识别模型进行识别;
6、所述车辆特征识别模型包括车牌号识别模型和车辆特征识别模型;
7、所述第一特征由所述车牌号识别模型进行识别;所述第二特征由所述车辆特征识别模型进行识别;
8、进一步地,所述车牌号识别模型包括车牌号输入模块、车牌检测模块、车牌号识别模块和车牌号输出模块;
9、所述输入模块用于输入所述摄像头获取的车辆图片数据;所述车牌检测模块用于检测车牌位置;所述车牌号识别模块用于识别车牌号;所述输出模块用于输出识别结果;
10、输入所述车辆图片数据至所述输入模块生成输入数据a1;将所述输入数据a1输入所述车牌检测模块检测车牌所处位置生成特征数据a2;所述特征数据a2输入所述车牌号识别模块识别车牌号特征生成特征数据a3;所述特征数据a3输入输出模块中输出识别车牌号结果;
11、所述车辆特征识别模型包括车辆特征输入模块、车辆轮廓特征识别模块、车辆颜色特征识别模块和车辆特征输出模块;
12、所述输入模块用于输入所述摄像头获取的车辆图片数据;所述车辆轮廓特征识别模块用于识别车辆的轮廓特征;所述车辆颜色特征识别模块用于识别车辆颜色特征;所述输出模块用于输出车辆的所有特征;
13、输入所述车辆图片数据至所述输入模块生成输入数据b1;将所述输入数据b1输入所述车辆轮廓特征识别模块分析车辆轮廓特征得到轮廓特征数据b2;将所述输入数据b1输入所述车辆颜色特征识别模块分析车辆颜色特征得到颜色特征数据b3;将所述轮廓特征数据b2和所述颜色特征数据b3输入输出模块输出车特征数据;
14、进一步地,停车第一状态缴费计时模块,所述摄像头将所述车辆的位置传输给系统,系统记录第一状态、第一时间和第一位置,所述摄像头依据所述第一特征和所述第二特征追踪所述车辆,追踪过程中所述摄像头传输系统所述车辆的图片数据,所述系统分析所述车辆的状态,当所述车辆的状态由所述第一状态转成第二状态,所述系统记录当前时间为第二时间;
15、所述第一状态为准备停车状态,所述第二状态已停车状态;所述第一时间为进入停车场时间点,所述第二时间为找到停车的车泊位时间点;所述第一位置为停车场入口位置;
16、停车第一状态计费模块,所述摄像头识别所述车辆停车的车泊位位置并反馈所述系统,所述系统依据所述车泊位位置计算第一状态时间阈值,所述系统依据所述第一时间、第二时间和第一状态阈值计算第一状态缴费数据;
17、进一步地,所述第一时间阈值为所述车辆从入口到所述车泊位的参考时间阈值;
18、所述参考时间阈值依据所述停车场的所述入口位置、所述车泊位位置和所述车泊位占用率获得;
19、所述第一时间阈值计算公式如下:
20、
21、
22、其中,tssl为所述第一时间阈值上限,tsfa为所述第一时间阈值下限,spdtssl为所述tssl的上限速度,spdtsfa为所述tsfa的下限速度,所述λcarn为所述停车场车泊位占用率,sfld为所述停车的楼层数,sdis为某一层所述车辆经过的多段路线,sscar(d,f)为多段所述路线的起点,secar(d,f)为多段所述路线的终点;
23、所述计算方法的路径计算,由所述摄像头拍摄所述车辆经过的路径关键节点;
24、所述路径关键节点包括入口位置、停车位置、路径拐弯位置、坡底位置和坡顶位置;
25、所述第一时间阈值的计算中的下限行驶速度数据为停车场最低行驶速度;所述第一时间阈值的计算中的上限速度数据参考所述车辆能够上坡的最低行驶速度;
26、进一步地,停车第二状态缴费计时模块,所述系统识别到所述车辆由所述第一状态转为所述第二状态,所述系统开始记录第三时间,所述摄像头依据所述第一特征和所述第二特征继续追踪所述车辆并向系统传输所述车辆的图片数据进行分析,当所述车辆由所述第二状态转为第三状态,所述系统记录第四时间;
27、所述第二状态已停车状态;所述第三时间为开始停车时间点,所述第四时间为结束停车时间点;
28、停车第二状态计费模块,所述系统依据所述第二位置所处楼层、所述第三时间和所述第四时间计算第二状态缴费数据;
29、进一步地,停车第三状态缴费计时模块,所述系统识别到所述车辆由所述第二状态转为所述第三状态,所述系统开始记录第五时间,所述系统记录所述摄像头识别所述车泊位位置为第二位置,所述摄像头依据所述第一特征和所述第二特征继续追踪所述车辆并向系统传输所述车辆的图片数据进行分析,当所述车辆完成第三状态时,所述系统记录当前时间为第六时间,所述摄像头将所述车辆所在的位置传输给系统,所述系统记录当前位置为第三位置;
30、所述第三状态为离开状态;所述第三位置为停车场出口位置;所述第五时间为驶离车泊位时间点,所述第六时间为离开停车场时间点;
31、所述第一状态、所述第二状态和所述第三状态判断方法为通过所述摄像头获取所述车辆的多张图片,所述车辆的多张图片包括所述第二特征,将多张所述车辆的图片按时间顺序排序,所述车辆的多张图片输入车辆特征相似度对比模型中进行对比;
32、进一步地,所述车辆特征相似度对比模型包括图片输入模块、特征强化模块、相似度对比模块和相似度输出模块;
33、所述输入模块用于输入多张所述车辆的图片;所述特征强化模块用于强化所述车辆的第二特征;所述相似度对比模块用于对比特征强化后图片的相似度;所述输出模块用于输出对比结果;
34、多种所述车辆的图片输入所述输入模块获取输入数据c1;所述输入数据c1输入所述特征强化模块增强所述第二特征获得增强图片c2;所述增强图片c2输入所述相似度对比模块对比所述图片相似度得到相似度数据c3;所述相似度数据c3输入输出模块中输出对比结果;
35、图像边缘增强计算公式如下:
36、
37、其中,rpic为边缘增强后图像,picj为需要边缘增强的图像,filj为边缘滤波器,n为所述边缘滤波器数量;
38、相似度对比计算公式如下:
39、
40、其中,csim为相似度对比度,picbi为需要对比的图像像素,picai为对比参考图像像素,num为像素数量;
41、若前后两张所述车辆图片相似度低且有第二状态记录,则判断为第一状态;若前后两张图片相似度高,则判断为第二状态;若前后两张图片相似度低且已有第二状态记录,则判断为第三状态;
42、停车第三状态计费模块,所述系统依据所述摄像头传输的所述第二位置和第三位置计算第二时间阈值,所述系统通过所述第五时间、所述第六时间和所述第二时间阈值计算第三状态缴费数据;
43、进一步地,所述第二时间阈值为所述车辆从车泊位到所述出口的参考时间阈值;
44、所述参考时间阈值依据所述停车场的所述车泊位位置、所述出口位置获得;
45、所述第二时间阈值计算公式如下:
46、
47、
48、其中,tesl为所述第二时间阈值上限,tefa为所述第二时间阈值下限,spdtesl为所述tesl的上限速度,spdtefa为所述tefa的下限速度,efld为所述停车的楼层数,edis为某一层所述车辆经过的多段路线,escar(d,f)为多段所述路线的起点,eecar(d,f)为多段所述路线的终点;
49、所述计算方法的路径计算,由所述摄像头拍摄所述车辆经过的路径关键节点;
50、所述路径关键节点包括停车位置、出口位置、路径拐弯位置、坡顶位置和坡底位置;
51、所述第二时间阈值的计算中的下限行驶速度数据为停车场最低行驶速度;所述第二时间阈值的计算中的上限速度数据参考所述车辆能够上坡的最低行驶速度;
52、进一步地,停车自动缴费模块,所述缴费方法为所述摄像头依据所述第一特征和所述第二特征追踪所述车辆,所述系统通过所述摄像头传输的图片数据分析所述第一状态、所述第二状态和所述第三状态的停车时间计算总缴费数据;所述总缴费数据依据所述摄像头识别的所述车辆的所述第三位置,所述系统将所述总缴费数据传输给所述第三位置的etc系统完成自动缴费;
53、所述总缴费数据计算包括第一状态缴费数据、所述第二状态缴费数据和所述第三状态缴费数据;所述缴费的费用数据计算公式如下:
54、mparcar=θfs·tfs+θss·λf·tss+θts·tts+θtef·tef+θtet·tet;
55、mparcar为所述缴费的费用数据,tfs为所述第一状态的停车时间,θfs为所述第一状态的缴费额度,tss为所述第二状态的停车时间,λf为所述第二位置所在楼层的缴费权重,θss为所述第二状态的缴费额度,tts为所述第三状态的停车时间,θts为所述第三状态的缴费额度,tef为所述第一状态超时的时间,θtef为所述第一状态超时的缴费额度,tet为所述第三状态超时的时间,θtet为所述第三状态超时的缴费额度。
56、与现有技术相比,本发明的有益效果为:
57、1、当车进入多层停车场后,通过一种车辆识别模型获取该车的车牌号和汽车特征,系统从汽车进入多层停车场后开始计时,通过分布在多层停车场内的摄像头根据车牌号信息和汽车特征追踪该车,在追踪过程中通过一种车辆相似度识别模型向系统定时发送该车在多层停车场内的当前状态,系统根据汽车不同状态获取不同状态记录对应的时间区间,直至汽车驶出多层停车场后完成追踪,通过该方法将多层停车场的找寻车位时间和驶离时间与正常停车时间进行区分计算,缓解了因为寻找浅层停车位造成的拥堵,增加了多层停车场的使用率。
58、2、当摄像头识别到汽车停在车泊位后,根据当前车泊位到入口距离和车泊位占有率计算进入时间阈值区间,当摄像头识别到汽车离开车泊位后,通过一种时间阈值计算公式自动计算当前车泊位与出口距离计算出口时间阈值区间,通过系统记录的从该车进入到停车时间自动对比进入时间阈值区间和该车离开到出口时间对比出口时间阈值区间,对超出时间阈值的进行额外收费惩罚,在区分停车时间缴费计算的同时也从多角度考虑停车收费的情况,不仅考虑到有人恶意占用车泊位的情况,也考虑到部分人因为自身原因恶意占用公共停车通道的情况。
59、3、通过摄像头识别当前车的特征并进行追踪,根据该车状态变化反馈系统记录对应时间,在该车完成停车离开多层停车场后,根据系统记录的时间通过一种综合缴费公式自动计算该车的停车时间,并根据时间自动计算出需要缴费的金额并反馈给出口处的etc自动缴费系统进行自动缴费,该系统能有效改善etc系统把用户找车位的时间也按照停车时间计算的情况,同时结合不同停车层收取不同的费用进一步增加了深层停车位的使用率。
本文地址:https://www.jishuxx.com/zhuanli/20240731/191469.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表