一种道路停车视频取证的计费异常处理方法与流程
- 国知局
- 2024-07-31 22:23:49
本发明属于路侧停车,具体的说,涉及一种道路停车视频取证的计费异常处理方法。
背景技术:
1、随着城市化进程的加快,停车问题日益凸显,道路停车管理成为城市治理的一大难题。为了有效管理道路停车,提高停车资源的使用效率,很多城市开始采用视频取证技术来对道路停车进行监管。然而,在实际应用中,由于各种原因,如技术故障、人为干扰等,导致计费异常的情况时有发生。这不仅给车主带来了不必要的经济损失,也影响了道路停车管理的公平性和公正性。
2、现有道路停车的路侧高位视频取证有以下缺点:对运营方而言,受高位视频的自动取证准确率影响,易出现只有入场没有离场的订单、以及没有离场只有入场的订单;对于这部分订单,人工纠正效率低,直接丢弃会造成收费损失。
3、鉴于此,提供一种提高路侧高位视频自动取证场景下的计费准确度,针对车牌识别错,进出记录未识别的异常场景,能有效纠正车牌、自动补齐进出记录的道路停车视频取证的计费异常处理方法以克服上述问题。
技术实现思路
1、本发明要解决的技术问题在于克服现有技术的不足,提供一种道路停车视频取证的计费异常处理方法,以实现对路侧高位视频计费系统中各个施工设备的实时监测和数据分析而有助于提高视频取证的准确度以及针对异常计费订单的审核效率。
2、为解决上述技术问题,本发明提供的一种道路停车视频取证的计费异常处理方法,包括以下步骤:
3、针对路侧每个车位,通过比较前后两个取证事件,根据不同的情况进行不同的处理;
4、情况一:当第一个事件为入场车牌a,第二个事件为离场车牌a,则为正常进出记录,无需处理;
5、情况二:当第一个事件为入场车辆a,第二个事件为入场车牌a,寻找两个事件间隔内定期抓拍秒图(秒图自动30秒进行抓拍),如果秒图没有出现空车位,且两个入场车牌a置信度超过c,则认为两次事件相同,自动丢弃第二个入场车牌a,取第一个入场车牌a作为该笔订单的入场时间,否则进入人工审核;
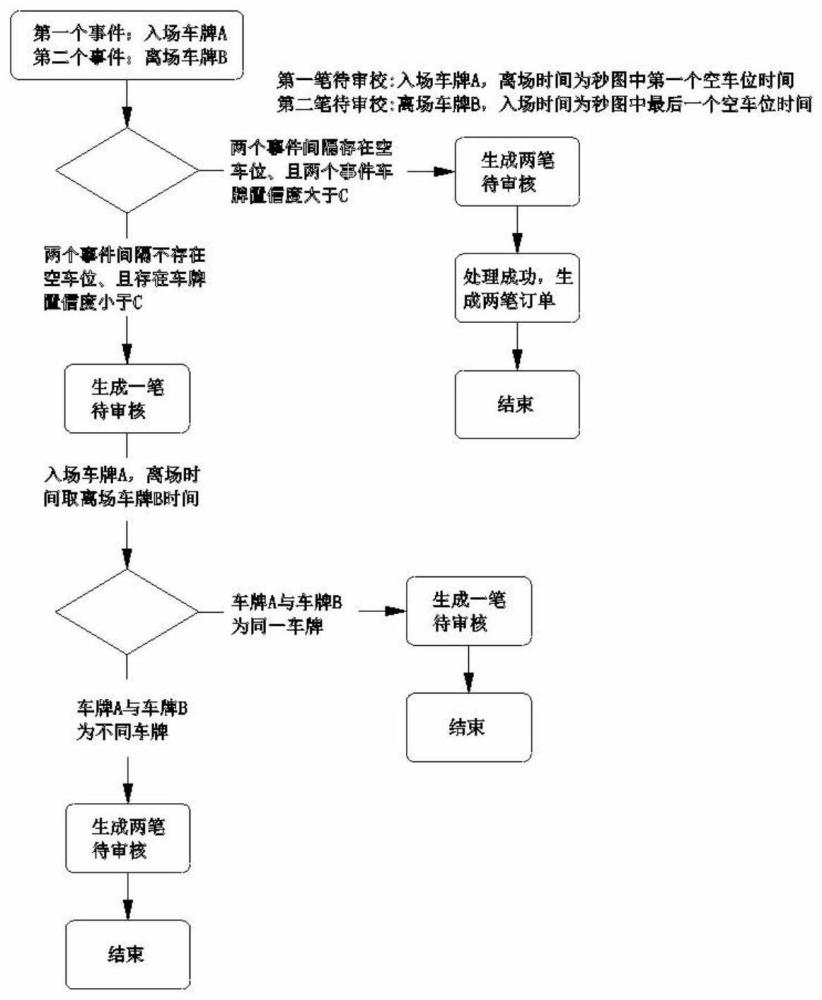
6、情况三:第一个事件为入场车牌a;第二个事件为离场车牌b,判断两个车牌置信度是否超过c,根据两个事件间隔内的秒图是否存在空车位,如果置信度超过c,且两个事件间隔内存在空车位,则将第一个空车位时间作为第一个事件的离场事件,同时将最后一个空车位时间作为第二个事件的入场时间,并将两条记录生成待审核,人工审核后该订单生效;
7、情况四:第一个事件为入场车牌a;第二个事件为入场车牌b,判断两个事件的车牌置信度是否高于c,并判断两个事件间隔内的秒图中是否存在空车位,如果置信度高于c、且秒图存在车位,则将第一个空车位时间作为第一个事件的离场时间,并生成待审核,审核通过后,第一个事件对应的订单生效。
8、优选的,在s1中,进行车牌识别置信度的动态调整,假设基础置信度阈值为s,天气影响因子为w,光照影响因子为l,拍摄角度影响因子为a,动态调整后的置信度阈值c通过以下公式计算:c=s*w*l*a,每个影响因子(w、l、a)都应该是一个介于0和1之间的数值,其中1表示没有影响,而小于1的值表示需要增加置信度阈值,下面是对每个影响因子的进一步说明和可能的取值范围:天气影响因子(w):
9、晴天:1.0
10、雨天:0.8
11、雾天:0.6
12、雪天:0.5
13、光照影响因子(l):
14、强光:0.8
15、正常光照:1.0
16、弱光:1.2
17、阴影:1.5
18、拍摄角度影响因子(a):
19、正面拍摄:1.0
20、轻微倾斜:0.9
21、较大倾斜:0.7
22、极端角度:0.5。
23、优选的,s是基础置信度阈值,通常是一个固定的值,表示在无特殊环境条件下车牌识别算法所能接受的最低置信度,w根据当前天气状况(如晴天、雨天、雾天等)来调整置信度阈值,即,雨天可能导致车牌识别率下降,因此w可能会小于1,l根据当前光照条件(如强光、弱光、阴影等)来调整置信度阈值,强光照可能导致反光,弱光可能导致车牌信息不清,因此这个因子可以帮助算法在这些情况下更加稳健,a根据摄像头与车牌之间的角度来调整置信度阈值,当摄像头与车牌垂直时,识别效果通常最好,角度偏斜可能导致识别难度增加。
24、优选的,w、l和a可以根据实际情况通过传感器数据来确定,它们通常是在0到1之间的数值,其中1表示没有调整(即基础置信度阈值),小于1表示需要提高置信度阈值(即需要更高的置信度才认为是正确的识别),而大于1则表示可以降低置信度阈值(即在较差的条件下仍然接受较低的置信度)。
25、优选的,在高峰时段,多个车辆同时进出确实会增加车牌识别的难度,可能导致误判或漏判,为了处理这种情况,算法可以采取使用多目标跟踪和增加图像预处理步骤,以及调整置信度阈值等,多目标跟踪:在复杂场景中,可以通过多目标跟踪算法来区分和追踪不同的车辆,多目标跟踪通常涉及目标检测、数据关联和轨迹维护等步骤,假设t表示时间,n表示检测到的车辆数量,d_t表示在时间t检测到的车辆集合,t_t表示在时间t的车辆轨迹集合,多目标跟踪的目标是建立d_t和t_t之间的对应关系,并为每个车辆维护一个连续的轨迹,公式为:t_t=mot(d_t,t_(t-1)),mot是一个多目标跟踪函数,它根据当前检测到的车辆d_t和上一时刻的车辆轨迹t_(t-1)来更新和预测当前时刻的车辆轨迹t_t;置信度阈值调整:在处理多车辆场景时,需要提高置信度阈值以减少误判,由于车辆之间的遮挡、相互干扰等因素,每个单独车辆的车牌识别置信度可能会下降,因此,算法可以根据场景中的车辆密度动态调整置信度阈值,公式为:c=s*d,其中d是一个根据车辆密度计算的因子,当车辆密度高时(即多车辆同时进出),d会小于1,从而提高置信度阈值;当车辆密度低时,d会接近或等于1,保持或降低置信度阈值;图像预处理:为了提高车牌识别的准确性,特别是在多车辆场景中,使用图像预处理技术,即背景减除、图像增强和去噪,以改善图像质量,从而提高车牌检测的准确性和鲁棒性。
26、采用上述技术方案后,本发明与现有技术相比具有以下有益效果。
27、1、本发明中,当高位视频对路侧在停车辆进行拍照取证时,根据同一车位上对不同车辆、不同进出记录,结合高位视频的连续秒图以及高位视频取证的车牌置信度,依据算法规则进行自动匹配,根据不同场景,自动生成完整的取证记录、或生成人工待核对的审核单,减少因高位视频相机误差导致的计费错误,提高路侧计费准确度,减少客户投诉,提高收费金额。
28、2、本发明中,针对车牌识别错,进出记录未识别的异常场景,能有效纠正车牌、自动补齐进出记录。
技术特征:1.一种道路停车视频取证的计费异常处理方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种道路停车视频取证的计费异常处理方法,其特征在于,在s1中,进行车牌识别置信度的动态调整,假设基础置信度阈值为s,天气影响因子为w,光照影响因子为l,拍摄角度影响因子为a,动态调整后的置信度阈值c通过以下公式计算:c=s*w*l*a,每个影响因子(w、l、a)都应该是一个介于0和1之间的数值,其中1表示没有影响,而小于1的值表示需要增加置信度阈值,下面是对每个影响因子的进一步说明和可能的取值范围:天气影响因子(w):
3.根据权利要求2所述的一种道路停车视频取证的计费异常处理方法,其特征在于,s是基础置信度阈值,通常是一个固定的值,表示在无特殊环境条件下车牌识别算法所能接受的最低置信度,w根据当前天气状况来调整置信度阈值,即,雨天可能导致车牌识别率下降,因此w可能会小于1,l根据当前光照条件来调整置信度阈值,强光照可能导致反光,弱光可能导致车牌信息不清,因此这个因子可以帮助算法在这些情况下更加稳健,a根据摄像头与车牌之间的角度来调整置信度阈值,当摄像头与车牌垂直时,识别效果通常最好,角度偏斜可能导致识别难度增加。
4.根据权利要求3所述的一种道路停车视频取证的计费异常处理方法,其特征在于,w、l和a可以根据实际情况通过传感器数据来确定,它们通常是在0到1之间的数值,其中1表示没有调整,小于1表示需要提高置信度阈值,而大于1则表示可以降低置信度阈值。
5.根据权利要求4所述的一种道路停车视频取证的计费异常处理方法,其特征在于,在高峰时段,多个车辆同时进出会增加车牌识别的难度,导致误判或漏判,通过多目标跟踪算法来区分和追踪不同的车辆,假设t表示时间,n表示检测到的车辆数量,d_t表示在时间t检测到的车辆集合,t_t表示在时间t的车辆轨迹集合,多目标跟踪的目标是建立d_t和t_t之间的对应关系,并为每个车辆维护一个连续的轨迹,公式为:t_t=mot(d_t,t_(t-1)),mot是一个多目标跟踪函数,它根据当前检测到的车辆d_t和上一时刻的车辆轨迹t_(t-1)来更新和预测当前时刻的车辆轨迹t_t;再对置信度阈值调整,即提高置信度阈值以减少误判,公式为:c=s*d,其中d是一个根据车辆密度计算的因子,当车辆密度高时,d会小于1,从而提高置信度阈值;当车辆密度低时,d会接近或等于1,保持或降低置信度阈值;最后进行图像预处理,即背景减除、图像增强和去噪。
技术总结本发明公开了一种道路停车视频取证的计费异常处理方法,涉及路侧停车施工监控技术领域,包括以下步骤:S1、针对路侧每个车位,通过比较前后两个取证事件,根据不同的情况进行不同的处理;S2、当第一个事件为入场车牌A,第二个事件为离场车牌A,则为正常进出记录,无需处理;S3、当第一个事件为入场车辆A,第二个事件为入场车牌A,寻找两个事件间隔内定期抓拍秒图,如果秒图没有出现空车位,且两个入场车牌A置信度超过C,则认为两次事件相同,自动丢弃第二个入场车牌A,取第一个入场车牌A作为该笔订单的入场时间,否则进入人工审核。本发明中,针对车牌识别错,进出记录未识别的异常场景,能有效纠正车牌、自动补齐进出记录。技术研发人员:付泽盛,赵灵志受保护的技术使用者:浙江咪网电子科技有限公司技术研发日:技术公布日:2024/7/9本文地址:https://www.jishuxx.com/zhuanli/20240731/193177.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。