基于行动节点曲线建模的自助收银放到一体化AI系统的制作方法
- 国知局
- 2024-07-31 22:23:41
本发明涉及零售行业自助收银,具体涉及一种基于行动节点曲线建模的自助收银放到一体化ai系统。
背景技术:
1、零售行业,尤其是商超自助通道的结算,对商家造成了较大的损失。商超现有手段是通过监控摄像头来人工进行查看,另外人工通道安排人员进行人工监督,但存在成本高的缺陷。
2、近几年ai收银秤、标签秤等智能化设备开始进入商超。摄像头通过拍摄秤盘上的商品,运用深度学习神经网络的技术进行商品的类别识别,进而收银员和称重员无需记录条码,直接进行结算。
3、自助结算通道的自助收银机,安装有条码扫描摄像头用于矿泉水等标品的扫描。该摄像头还可以用来拍摄图片,进行动作的识别。识别的技术方案是:
4、1)采集扫码动作作为训练样本。
5、2)利用深度神经网络判断该动作是否属于收银动作。
6、3)然后去比对收银动作和收银系统中收到的结算信息是否一致。
7、动作识别是人工智能领域一种比较常见的图像识别技术。主要流程是:
8、①定义需要识别的内容,设立标准。比如某个具体的手势等。
9、②采集图片后,搭建网络结构进行训练。网络结构一般是选用学术上的一个基础网络,然后进行场景化的结构调整
10、③利用深度学习框架,比如caffe tf pytorch等开源深度学习框架进行训练。获取识别网络。
11、现有自助通道防损实现方法及缺陷如下:
12、方案1:通过自助通道顶部监控摄像头,人工进行监控。
13、方案2:通过在收银台假设摄像头监控收银动作,与监控摄像头进行屏幕上实时显示收银过程,进行人为监控。
14、方案1和方案2的缺陷:
15、1、人工判断难度大。
16、2、无法准确辨别是否漏扫、假扫。
17、3、无法做到拦截及时拦截。
18、4、人工判断需要时间。
19、方案3:收银自助机上外加摄像头。判断是否存在扫码动作以及托盘是否存在变化,以此来判断漏扫行为。
20、方案3的缺陷:
21、1、漏扫动作识别误报率高,导致频繁人工解锁,影响结算速度,需要投入大量的监管人员。误报率高的部分情况如下:故意来回放置商品,会导致多次扫码动作被识别。真实存在多次扫码,多次识别。
22、2、无法监控自助台、托盘外的漏扫动作。缺少购物车实时联动识别。
23、3、对于刻意隐藏商品的漏扫行为无法识别。比如藏在其他物品下面躲避摄像头检测。
24、4、无法实现错扫检测。只监控扫码动作,但是扫码商品是否为结算真实商品无法监控。比如:苹果购物袋外面贴了价格较低的西红柿的标签;一个购物袋有多个标签需要扫描的,但是顾客只进行一次扫描。
技术实现思路
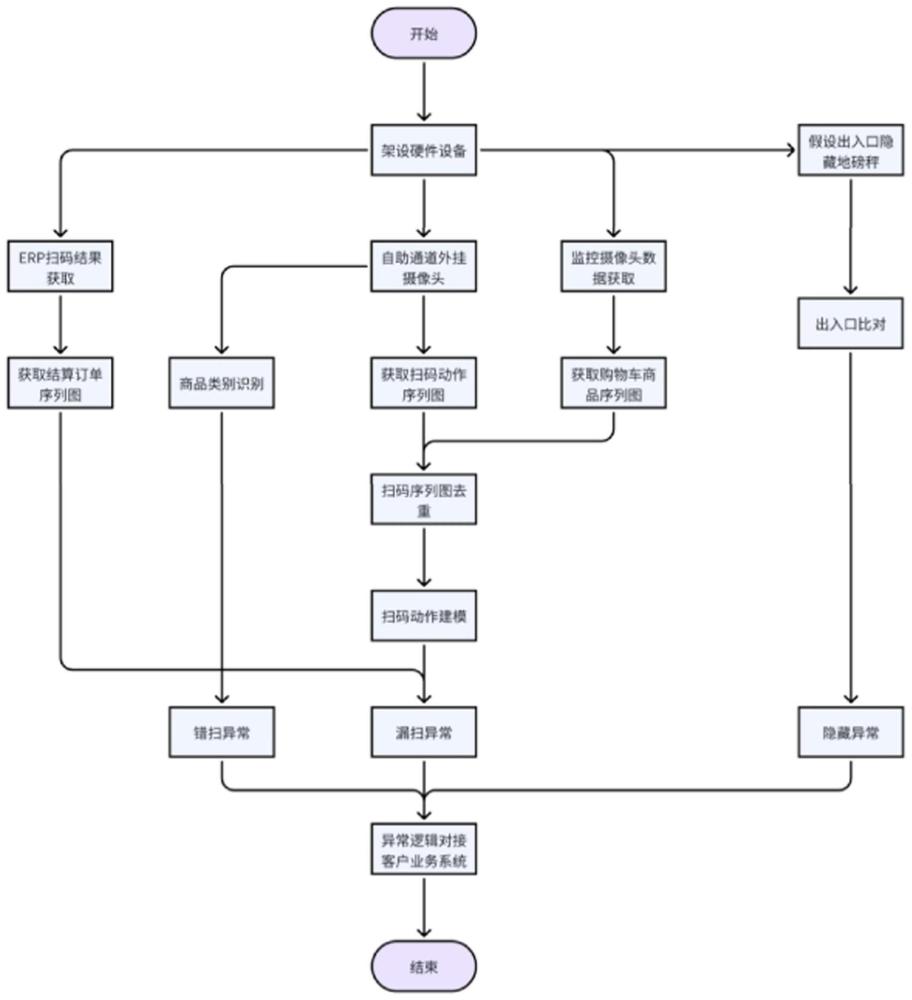
1、本发明主要解决现有技术中存在的不足,提供了一种基于行动节点曲线建模的自助收银放到一体化ai系统,其具有防损防盗功能、操作便捷和运行稳定性好的特点。通过监控摄像头与自助机监控摄像头序列结合的方法,解决了漏扫和错扫的问题。
2、本发明的上述技术问题主要是通过下述技术方案得以解决的:
3、一种基于行动节点曲线建模的自助收银放到一体化ai系统,其特征在于包括如下操作步骤:
4、第一步:硬件架设,在自助结算机处外接摄像头,定义为i目摄像头;自助通道的监控摄像头,定义为ii目摄像头,定义标品扫码摄像头为iii目摄像头;出入口假设地磅秤以及人脸识别装置,定义为iv目摄像头。
5、第二步:会员信息出入口信息绑定,会员入口,采集重量信息,并绑定人脸。
6、第三步:会员入场,采集重量信息,并绑定购物信息,获取ii目摄像头采集数据,调用fcn图像分割算法,定位出购物车位置。
7、第四步:新建购物车节点序列c[t],并初始化该序列为空c[t]=null。
8、第五步:ii目摄像头获取购物车位置,设定连续抓拍频率为10ms,图像预处理,图像分割网络,输出购物袋个数,判断个数是否减少,如果减少,则新增商品离开车的序列节点ck。
9、第六步:获取中间数据:购物车商品节点、扫码节点、结算节点,通过iii目摄像头获取订单信息mk。
10、第七步:无效ak去重,通过ck、k+1ms范围内的ak合并;ak为扫码序列节点,即判定通过跟踪人手中心位置,完成一个扫描动作后,图片抓拍的位置节点保持一致,则认定一次扫描动作结束,新增一次扫描序列节点ak。
11、第八步:漏扫判断,满足下列条件任一个,获取ii目摄像头和i目摄像头监控数据并上传至客户业务端:1、ck>ak,表明商品离开购物车的节点数量大于扫码数量,则存在漏扫行为;2mk&ck==0,表明离开车的动作和扫码动作不匹配,则存在漏扫行为;错扫判断:满足下列条件,则存在错扫风险,获取ii和i目摄像头监控数据并上传至客户业务端:(mk&ck==1)&&(s(lk)!=s(ck));表示离开购物车动作和扫码动作一致匹配,但是扫码商品价格和识别商品价格不一致,则表示错扫。比如扫码时进入结算的价格是苹果。但是实际商品是榴莲。
12、作为优选,判断是否为新会员,如果是,则新建临时会员购物序列。
13、作为优选,i目摄像头提前完成标定摄像头区域,硬件架设结束后就已经完成且保存在服务器端,i目摄像头设置连续拍照间隔为10ms一张,并进行单张图片处理,舍弃无效图片,保留有效中心位置pt(x,y),绘制节点曲线y={pt(x,y)}t=0,δt=10ms。
14、作为优选,计算区域边界焦点d1和d2,存在且唯一,则标记为有效序列扫码节点{ak,lk},其中lk为商品品类。
15、作为优选,d1和d2是连拍图片获取的位置中心点拟合的曲线与拍摄边界的焦点,公式如下:
16、节点曲线为y={pt(x,y)};
17、x=(x1,x2,..,xn);
18、y=(y1,y2,...,yn);
19、拟合二次多项式:p=polyfit(x,y,2);
20、生成拟合曲线所需的x值:xx=linspace(1,10,100);
21、拟合曲线:y_polyfit=polyval(p,xx);
22、则记下来计算边界值,得到d1(x=0,y1),d2(x,y=0)。
23、作为优选,单张图片处理采用3任务深度神经网络,完成是否为人手、中心位置坐标输出、商品品类;
24、3任务深度神经网络整体结构采用的是yolov3的结构,包括conv2d1*1的特征为f(x,y);
25、先进行卷积layers.conv(f(x,y),kernel(1,1));
26、然后上采样resize(layers.conv(f(x,y),kernel(1,1)),2);
27、最后线性变换lp,能够将人手标签的预测特征值进行因子抑制,得到:resize(layers.conv(f(x,y),kernel(1,1)),2)*h(x,y);
28、卷积、上采样和线性变换lp三者之间的关系是函数运算关系。
29、卷积为一种常见的标准cnn的计算组件,卷积如下计算如下:
30、
31、
32、
33、
34、作为优选,上采样的pytorch实现方式为:
35、x=torch.randn(x,y,h,n);
36、insert=nn.functional.interpolate(x,sacle_factor=2);
37、y=insert(x);
38、线性变换lp,则卷积核为对角,套用卷积计算即可,卷积矩阵如下:
39、a,0,0
40、0,b,0
41、0,0,c。
42、作为优选,图像预处理采用图像尺寸变换和归一化处理;图像分割网络采用unet结构,unet是一种用于图像分割的卷积神经网络结构,具有一个对称的u形结构,包括编码器和解码器部分;编码器部分,也称为收缩路径,用于特征提取和上下文信息捕获,这一部分由一系列卷积层和最大池化操作组成,每经过一次池化操作,特征图的尺寸减半,但通道数通常会增加;解码器部分,也称为扩张路径,用于上采样特征图,以恢复原始图像的分辨率;这一部分包括上采样操作和卷积层,上采样通常通过转置卷积或插值实现。
43、作为优选,外接摄像头i目分辨率不低于200w,像素1.2mp。
44、本发明能够达到如下效果:
45、本发明提供了一种基于行动节点曲线建模的自助收银放到一体化ai系统,与现有技术相比较,具有防损防盗功能、操作便捷和运行稳定性好的特点。通过监控摄像头与自助机监控摄像头序列结合的方法,解决了漏扫和错扫的问题。
本文地址:https://www.jishuxx.com/zhuanli/20240731/193167.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。