支持脱机的停车场多门多车道智能收费系统的制作方法
- 国知局
- 2024-07-31 22:26:40
本技术涉及一种停车场多门多车道收费系统,特别涉及一种支持脱机的停车场多门多车道智能收费系统,属于停车场智能收费。
背景技术:
1、随着汽车保有量的急剧攀升,很多城市的停车难问题日渐突出。如何解决停车难问题已经迫在眉睫。目前,很多地方已经把停车场作智慧城市的构成部分,并与其它智慧城市的构成部分渐渐结合在一起,设计一个智能停车场收费管理系统已经变的越来越重要。
2、当前停车场收费管理系统正在向智能化的方向前进,车牌识别技术的出现提高了交通的流动性,车牌识别采用图像处理和字符识别技术自动读取车牌识别车辆。虽然结合当前的识别技术设计出了不少智能停车系统,但是却都不能做到100%的智能控制实现不停车收费。
3、现有技术停车场管理系统需要解决的主要问题和本技术关键技术难点包括:一是相机识别率的限制较大,现有技术比较好的相机的识别率高达97%,当车牌识别错误时,会对整个系统带来一系列问题,同时还需要人工处理跟进,影响了停车场的智能化管理。二是当前的相机类型不统一,除了基于本系统的联讯捷相机,还包括像大华相机,海康相机,臻识相机主流的相机类型。每种类型的相机都有自己的特性,在不同的环境下识别正确率各有优劣,生产相机的各个公司也并不统一,所以基本上是每一个停车系统场都是基于某一个类型的相机开发的,降低了软件的开发效率,没有充分利用主流相机共有的特性和优势。三是当前的识别设备不仅有相机,还有etc以及用于显示的led等电子设备,一个完整的停车场系统,需要充分利用以上资源,结合各个硬件的特性来设计,但现有技术的停车场系统没有充分关联相机、etc、led等电子设备,在车牌被相机识别错误的情况下会出现严重错误,无法实现智能收费,停车场系统的智能程度较低。四是停车场的收费问题也是当前需要注意的焦点,同一个停车场会出现收费标准不统一,收费混乱等情况,其原因除却人为的因素外,就是停车场系统收费模块设计不合理。五是当前的停车场系统收费,一般在门处设置收费亭收费,多个门需要设置多个收费亭,甚至多个车道也需要设置多个收费亭,没有充分利用人力资源,存在大量的人财物的浪费,进出收费亭的效率也比较低,经常造成进出停车场的拥堵。
4、基于以上背景,实现出一个能基于多个相机类型识别,一个客户端控制多门多车道,可以自动纠正识别错误而且可以维护各种收费标准的智能停车场收费系统就显得尤为必要。
技术实现思路
1、本技术针对主流相机类型,实现了基于软硬件结合的智能停车场收费管理系统:针对相机特性,基于多线程和神经网络技术建立基于四种不同类型、不同型号相机的双相机识别算法,解决了监控系统的任意一个车道支持不同类型、不同型号的相机组合成双相机识别的问题。提出了基于自学习的近似字典和模糊匹配算法,使车辆车牌在相机识别错误的情况下也能实现车辆自动出场,实验结果表明模糊匹配算法使停车场系统的智能程度提高了约17%,由此解决了在相机识别错误情况下,车辆自动出场的问题。基于相机的特性建立收费亭脱机出场处理与相机脱机处理方法,由此解决了在停车场断网的情况下,车辆自动出场的问题。针对传统停车场在每个门处设置一个或多个收费亭管理车道的情况,采用对停车场系统的建模与面向对象的方法使得客户端同时监控多个收费亭的多个车道,一个收费亭端的客户端不仅可以同时控制收费亭端所有的出车道和入车道,还可以授权控制其它收费亭的出车道和入车道。建立了可维护的智能收费模块,设计多种基于时空的收费标准与收费策略并实现多种收费渠道。
2、为实现以上技术效果,本技术所采用的技术方案如下:
3、支持脱机的停车场多门多车道智能收费系统,一是采用多线程和神经网络技术构建基于不同类型、不同型号相机的双相机识别算法,提出基于自学习的近似字典和模糊匹配算法;二是基于停车场系统的建模和面向对象的方法建立客户端同时管理多个门下多个车道的特色模块;三是设计多种基于空间与时间的收费策略,提升系统收费的智能性,实现注册车辆的不停车收费;具体包括:
4、1)基于多设备的模糊车牌精准识别,包括:基于人工置信度的计算、基于置信度的异构双相机识别算法、基于多设备的出入场控制算法、多类型相机支持,针对相机特性,基于多线程和神经网络建立基于四种不同类型、不同型号相机的双相机识别算法,监控系统的任意一个车道支持不同类型、不同型号的相机组合成双相机识别;
5、2)出场车牌识别的模糊匹配算法,包括:基于自学习的近似字典、基于近似字典的模糊匹配算法,使车辆车牌在相机识别错误的情况下也能实现车辆自动出场;
6、(3)网络故障的智能优化处理,包括:脱机判断、相机脱机处理,基于相机的特性建立收费亭脱机出场处理与相机脱机处理方法,解决在停车场断网的情况下,车辆自动出场问题;
7、(4)单一客户端管理多门多车道,包括:多车道实现、多车道监控,针对传统停车场在每个门处设置一个或多个收费亭管理车道的情况,采用对停车场系统的建模与面向对象的方法使得客户端同时监控多个收费亭的多个车道,一个收费亭端的客户端不仅可以同时控制收费亭端所有的出车道和入车道,还可以授权控制其它收费亭的出车道和入车道;
8、(5)基于时空关联的智能收费策略,包括:基于基础收费标准的计算、基于优惠标准的算法,建立可维护的智能收费模块,通过多种基于时空的收费标准与策略实现多渠道收费。
9、优选地,基于人工置信度的计算:
10、1.置信度的获取
11、(1)当双相机类型是不同型号的相机组合时,置信度为相机识别返回的置信度;
12、(2)当双相机组合为不同类型的相机组合时,置信度是根据该台相机型号与相机ip从数据库读取的值,每次相机识别错误之后系统自动更新数据库中该台相机的人工置信度;
13、2.人工置信度的计算
14、记初始置信度为dgo,最近识别的m辆车中识别错误的车辆数为cw,车辆的置信度为dg,置信度:
15、dg=dgo-cw/m 式1
16、3.选取相机类型
17、记相机对于不同车牌的识别正确率为cr,记识别临界值为cr,有cr=cr+a,a∈(0.01,1-cr),其中a为调节临界值因子,设双相机中相机1的人工自信度为dg1,相机2人工自信度为dg2;
18、当dg1≥cr&&dg2≥cr时,2台相机的识别度都非常的高,选取最先识别到车牌的那一台相机;
19、当dg1<cr||dg2<cr时,最近2台相机的其中某1台相机或2台相机识别最近出错的几率比较高,选取人工置信度较高的那一台相机。
20、优选地,基于置信度的异构双相机识别算法:数据结构体保存相机的识别信息,记结构体为ci,每一台相机ip与ci构成一个键值对,键值key是ip,value是与其对应的ci,如果是双相机,两个不同的ip对应于同一个ci;
21、1.记相机本次识别到车牌的时间与上次识别到车牌时间的时间差为span,通过设置span的大小来控制双相机识别的效率:
22、span=datetime.now()-ci.time 式2
23、设span=250ms,双相机触发的时间差不超过250ms,如果超过250ms,说明识别的不是同一辆车,将当前识别的车牌记录下来,如果span在250ms之内,说明相机识别的结果是对同一个车牌识别的结果;
24、2.算法开启两个线程,每一个相机对应于一个线程,记相机1开启的识别线程为t1,相机2开启的识别线程为t2,两个线程分别共享同一个结构体ci,对ci进行读写,当t1对ci进行读写时,t2等待,只到t1读写完毕,t2对同一个ci进行读写时,t1等待,只到t2读写完毕;
25、2个识别线程t1,t2分别触发识别线程。识别线程算法流程如下:1)获取对应车道的相机参数,初始化ci,开启相机识别线程t1,t2,等待触发;2)车辆到来识别线程触发,获取相机信息,车牌信息p,置信度dg,转①;①判断ci是否加锁,如果加锁,就等待,否则转到②;②根据ci判断ci.plate_last==p,如果为true,转到3),否则转到③;③根据ci,计算时间差span=ci.time-datetime.now(),判断span>250ms,如果为true,转到④,否则转到⑤;④说明是一个新纪录(另外一辆车),将置信度dg,车牌p,识别时间写入ci,ci.plate=p,ci.last_plate=ci.plate,ci.dg=dg,ci.time=datetime.now(),并向数据库插入车牌信息,转3);⑤判断是否与上次识别的相机同是联讯捷类型相机,如果不是转⑥,否则转⑨;⑥判断两相机置信度是否大于临界值cr,如果大于转3),否则转⑦;⑦比较置信度ci.dg>dg,如果为fast,转到3),否则转到⑧;⑧获取车牌p、置信度dg,更新结构体ci,ci.plate=p,ci.last_plate=ci.plate,ci.dg=dg,修改数据库中的车牌信息,转3);⑨确认是否同一型号,如果不是同一型号转⑦(此时转⑦比较的置信度是相机置信度不是人工置信度),否则转⑩;⑩利用bp神经网络训练的权值与ci得到识别较准确的相机的型号。如果相机型号是此次识别的相机型号转⑧,否则转3);3)算法结束。
26、优选地,基于多设备的出入场控制算法:
27、1.etc嵌入系统:etc通过无线设备获取车牌,在系统中嵌入etc,对装有etc的车实现不停车收费,etc作为某一类型相机,实现etc与相机双设备联合识别,etc和相机独立工作,每次识别同一辆车的车牌,当相机识别异常的情况下,根据etc的识别结果获取车牌。
28、2.led嵌入系统
29、1)将pc作为服务端,led作为客户端;
30、2)led不断的给pc发送心跳包,在pc端进行监听工作,当监听到led时,记录下led的ip,作为pc端的一个客户;
31、3)led的ip做为车道类的一个属性,当pc要给该ip对应的车道发送语音信息时,控制led发送信息;
32、主线程算法流程:1)主线程开启pc-led连接线程t1,相机线程c1;2)c1获取相关信息message,并调用t1所获取的led客户;3)c1对该led客户发送message;4)算法结束;
33、pc-led连接线程流程:
34、1)主线程开启pc-led连接线程t1,转2)﹔
35、2)线程t1开启监听线程l1,l1监听到客户端led,记录下led的ip,开启确认此ip的接收线程s1,转3);
36、3)开启接收线程s1,接收led发来的心跳包,如果该ip对应的led屏发来心跳包为空,则转4),否则给led发生确认收到指令,转5)﹔
37、4)移除该ip对应的客户端,转5);
38、5)算法结束。
39、优选地,多类型相机支持:1)首先客户端配置不同的相机类参数包括相机ip、相机类型、所属车道;2)构造一个相机的基类,各种不同类型的相机作为实体,各自创建一个类并且继承相机的基类;3)相机的基类作为车道的属性,由不同的相机ip和类型来创建不同类型的相机类,返回相机类对象的实例,相机基类作为“特定类型的相机类”对象实例的引用;4)每个相机类一旦创建就开启识别线程,当有车辆经过时,相机识别到车牌,触发识别线程中的车牌处理回调函数实现车牌处理。
40、优选地,基于自学习的近似字典:
41、(1)近似字典:近似权重反映相机将字符s识别成字符t的概率,2个字符近似权重越大,说明相机将字符s识别字符t的概率也越大,规定任意2个字符组成的字符对的近似权重最大为9,最小为0,相同2字符组成的字符对的近似权重为9,不同字符组成字符对的近似权重为0,近似权重为0的不同字符对在后期会随着车牌被相机识别错误次数的增加而变大,但最大不大于9,规定由字符对和字符对对应的近似权重组成的数据表为近似字典,列出近似权重大于8的近似字典;
42、在数据库中设有保存近似字典的数据表,字段为:字符1,字符2,近似权重,错误次数。
43、(2)近似字典的自学习算法:近似字典在车辆出场时随车牌识别错误次数的增加而增加,设<s1,s2>为近似字符对,ds12=similar<s1,s2>为近似权重,ns12=sum<s1,s2>为近似字符识别错误的次数,算法流程为:
44、1)获取近似字符转①;
45、①判断是否获取到近似字符,如果是转②,否则转2)﹔
46、②判断近似字符对是否在字典中,如果在转③,否则转⑥;
47、③判断近似权重是否等于9,如果是转2),否则转④;
48、④读取数据库,判断次错误次数n>4,如果为false,ns12++,写入数据库,转2),如果为true,ns12++,转⑤;
49、⑤近似字符的近似权重加1,即d s12++,将错误次数加1,更新数据库和数据字典,转2);
50、⑥将字符对<s1,s2>、近似权重ds12=similar<s1,s2>=0,错误次数ns12=sum<s1,s2>=1插入数据库,转2);
51、2)算法结束。
52、优选地,基于近似字典的模糊匹配算法:
53、(1)模糊匹配方法:记近似度为d,p为相机识别到的车牌,t为待匹配的车牌,模糊匹配临界值为w,xi为p的第i个字符,yi为t的第i个字符,d为字符对的近似权重且d=f(xi,yi),l为车牌长度,近似度公式如2:
54、
55、若d大于或等于给定的模糊匹配临界值w,则p、t视为同一车牌,否则视为不同的车牌,模糊匹配临界值w根据环境和相机识别的优劣选择,取值为w1,w2,w3,m为最大权重9,s为允许模糊字符的数目,fa为调节因子,临界值计算公式如式3、式4、式5:
56、w1=l*m 式3
57、w2=(l-s)*m+s*fa fa∈(0,m]且fa∈n 式4
58、w3=(l-s)*m 式5
59、其中w取值w1称精确匹配,不允许车牌识别错误的字符,取值w2称近似模糊匹配,允许p,t有s个字符的差别,但字符差别不应偏离字符字典,且fa越大,要求不同字符之间的近似权重越大,取值w3称普通模糊匹配,允许p,t有s数量个不同的字符,且不同字符的近似权重为0;
60、记直接利用近似度公式计算近似度比较模糊匹配临界值来判断p,t是否匹配的算法为一般模糊匹配,一般模糊匹配解决车牌识别错误类型是p,t对应位上识别错误的情况;
61、(2)基于最大共享子序列的模糊匹配:对于p,t按照最大共享子序列的方法来匹配,判断字符对的近似权重是否大于或等于规定临界值dt,记d(i,j)为p的前i个字符串与t的前j字符串的最大近似度,得p,t基于最大共享子序列递归公式关系如式6:
62、
63、当d(l,l)≥w时,说明是同一车牌,匹配成功;当d(l,l)<w说明识别的是不同车牌,匹配失败,该递归公式采用动态规划算法,使错位车牌一次匹配的时间复杂度降低;
64、记一般模糊匹配与基于最大共享子序列的模糊匹配统称为基于近似字典的模糊匹配,模糊匹配根据模糊匹配临界值的选择有精确、普通、近似模糊匹配三种,每一种模糊匹配首先调用一般模糊匹配来匹配车牌,当利用一般模糊匹配匹配不到在场车牌时,系统自动使用基于最大共享字序列模糊匹配去匹配在场车牌;
65、(3)模糊匹配算法流程:
66、1)获取相机识别的车牌p;
67、2)获取车道近似度临界值w,获取数据库在场车辆车牌数组t[],记数组大小为n,并设i=0;转①;
68、①判断i==n,且i++,如果为false,转到②,如果为true,转到③;
69、②判断p==t[i],如果为true,转到3),否则转到①;
70、③将i赋值为0,取在场车辆t[i]与p进行一般模糊匹配(i从0到n)转到④;
71、④判断i==n,且i++,如果为false,转到,如果为true,转到⑥;
72、⑤利用近似度公式,计算两车牌的近似度如果d≥w,记录此车牌t[i],转到④,否则直接转到④;
73、⑥判断是否有近似车牌记录,如果为true,取出唯一的车牌t[x],调用基于字典的自学习算法计算近似字符对,转到否则转到⑦;
74、⑦将i赋值为0,开始取在场车辆t[i]与p进行基于最大共享子序列的模糊匹配(i从0到n),转到⑧;
75、⑧判断i==n,且i++,如果为false,转到步骤⑨,如果为true,转到步骤⑩;
76、⑨利用基于最大共享子序列的模糊匹配公式,计算两车牌的近似度,如果d≥w,记录此车牌t[i],转到⑧,否则直接转到⑧;
77、⑩判断是否有近似车牌记录,如果为true,取出唯一的车牌t[x],转到否则转到人工处理,转3);
78、返回近似度最大的车牌t[x],转到3);
79、3)算法结束。
80、优选地,网络故障的智能优化处理:
81、(一)脱机判断:记车牌获取的时间为ptime、服务器时间severtime、相机时间cameratime、收费亭端时间clienttime和当前时间currentime,这四个时间在每次启动系统时进行同步处理,即要求服务器时间等于收费亭端时间等于相机时间等于当前时间:
82、severtime=cameratime=clienttime=currentime 式7
83、相机每次捕获到车牌后触发收费亭端的回调函数,将车牌信息发送给收费亭端,收费亭端获取到车牌之后,进入车辆出场处理流程,正常情况下,相机获取车牌的时间与收费亭执行相机回调函数获取车牌信息后进入车辆出场流程之间的时间差最多不超过60s,当ptime+60<clienttime时,说明相机与收费亭端曾经脱机,此时的车牌信息是重新连接网络之后相机将内部保存的车牌信息传入到收费亭端的车牌信息;
84、(二)相机脱机处理
85、1.相机获取到车牌转①;
86、①相机判断是否与收费亭端脱机,若是转②,否则转④;②判断车辆是否月租车类型,若是转③,否则转⑧;③相机作为一个独立系统,采用485通信控制着闸道开启与led显示,实现车辆自动出场,转2);④触发收费亭端的出场流程,传送照片和相关信息,转⑤;⑤判断ptime+60<clienttime,若为true转⑥,否则转⑦;⑥说明是脱机时期的车牌信息,保存照片信息,进行收费亭脱机出场处理,转2);⑦收费亭端来控制车辆进入正常情况下的出场流程,转2);8手动处理,转2)﹔2)算法结束。
87、优选地,基于时空关联的智能收费策略:
88、(一)基于基础收费标准的计算:基础收费标准的计算是后期收费的基础,先按基础收费标准算出收费总金额,然后按照优惠标准计算优惠总金额,总金额与优惠金额之间的差值就是应收费用。虽然不同的停车场内或同一个停车场中不同停车区内的基础收费标准可能不同,但基础收费标准的计算式统一。对于某一条收费标准:记免费时间为free_time简记为ft,起始时间start_hour简记为st,起始费用为strat_fee简记为ste,后续时间为follow_time简记为fwt,后续金额为follow_fee简记为fwe,基本收费总金额为feel,车辆入场时间为datatime_in,出场时间为datetime_out,在场时间t为:
89、t=datetime_out-datetime_in 式8
90、费用计算式为:
91、
92、(二)基于优惠标准的算法:设相对时间优惠标准为每周d1到每周d2的t1到t2;入场时间的日期为c1,时间点为t1,出场时间为c2,时间点为t2;
93、1)首先根据停车区,选取基于该区的收费规则;
94、2)根据车辆出场入场时间、费用公式计算收费总金额w;
95、3)停车区,选取基于该区的n个优惠标准并用对象数组r[]保存下来,由于有多种优惠标准,所得的优惠金额可叠加,所以针对每一种优惠标准来计算优惠金额,初始化参数:令i=0,优惠金额summoney=0;转①;
96、①判断i==n,i++如果为true转4),否则转②;
97、②初始化该优惠金额sum=0;根据对应的优惠标准r[i],查看该标准内的优惠类型,转入不同的优惠函数,进行相对时间优惠的计算,转③;
98、③判断在场时间一共横跨几天,如果为0天转④,为1天转⑦,其它转
99、④判断该天是否在优惠标准内,即c1所在的时间的周期是否属于[d1,d2],若为false,转4)。否则转⑤;
100、⑤判断该天出入场时间点与优惠标准时间点是否有交集,即若为false,转否则转⑥;
101、⑥取[t1,t2]∩[t1,t2]的交集时间[ts,te],算出时间差t,根据相对时间优惠计算公式f5算出优惠金额,转④;
102、⑦判断该天是否在优惠标准规定的时间内,即c1所在的时间的周期是否属于[d1,d2],若为false,转⑩,否则转⑧;
103、⑧判断该天入场时间点是否大于等于优惠标准的结束时间,即t1≥t2,若为true,转⑩,否则转⑨;
104、⑨取出该天的在场时间与优惠标准的时间段的交集,即[max(t1,t1),t2],计算时间差t,根据相对时间优惠类型计算公式f5算出优惠金额,转⑩;
105、⑩判断次天是否在优惠标准的周期内,即c2所在的时间的周期是否属于[d1,d2],若为false,转否则转
106、判断次天出场时间点是否小于等于优惠标准的开始时间,即t2≤t1,若为true,转否则转
107、取次天的在场时间与优惠标准的时间段的时间交集,即[t1,min(t1,t2)],计算时间差t,根据相对时间优惠计算公式算出优惠金额,转
108、按照算法⑦-算出第一天和最后一天的优惠金额然后累加,对于中间的每一天,只需判断该天是否在优惠标准的周期内,如果不在,计算下一天;如果在,取出该天与优惠标准内时间段的交集[t1,t2],根据相对时间优惠计算公式算出优惠金额,转
109、summoney+=sum;转①;
110、4)算法结束。
111、优选地,单一客户端管理多门多车道:
112、(1)监控界面类设置:将监控分为二部分,一部分是入场的监控,另一部分是出场的监控,在入场监控中管理多个入车道的监控,在出场的监控中管理多个出车道的监控,采用面向对象的方法,针对监控界面的显示创造6个类:主监控界面类fmpmsmonitor,入场监控界面类ucpmsmonitorunitinfin、出场监控界面类ucpmsmonitorunitinfout、出车道监控类ucpmsmointorinfout、入车道监控类ucpmsmointorinfin和车道监控类的基类ucpmsmointorinf。
113、入场监控界面类对象数组和出场监控界面类对象数组作为主监控界面类fmpmsmonitor中的属性,在算法的初始化中,首先从数据库读取该主机号对应的车道号,然后根据车道号判断车道的类型,对于出车道调用出场监控界面类,获得出场监控界面,保存在主界面类中的出场监控界面类对象数组中,入车道调用入场监控界面类,保存在主界面类中的入场监控界面类对象数组中;
114、出场车道监控类和入场车道监控类继承车道监控类的基类,基类负责构造车道共有的界面,对于不同车道类型,创建不同的监控界面类,每一个车道创建一个车道监控类的实体对象,统一交给车道监控界面类,对于每一个车道里面的相机则利用多态技术,开启相机线程来对各自的车道独立监控;
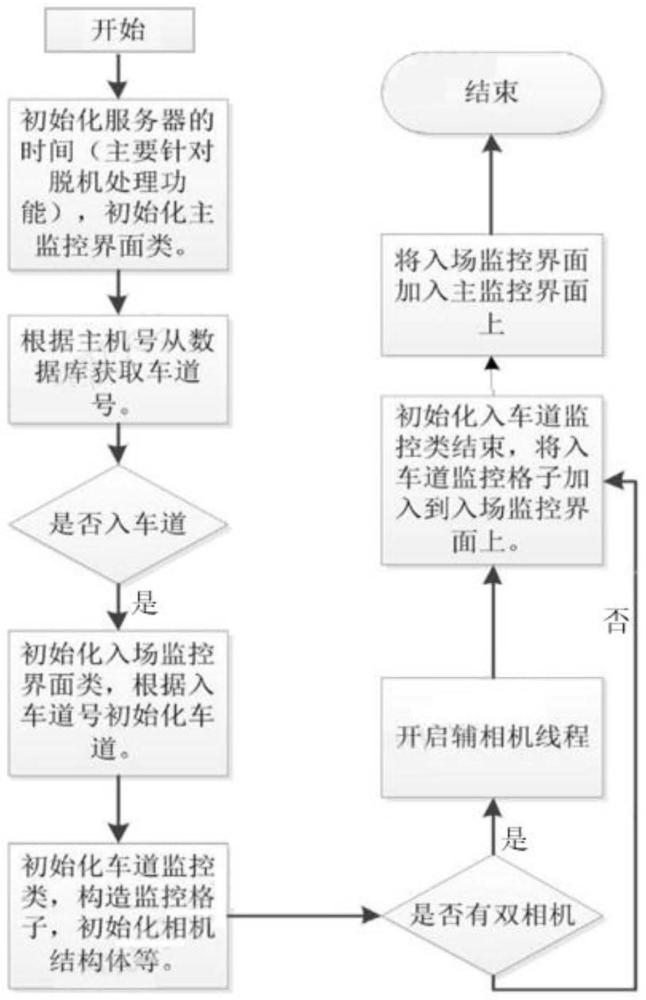
115、(2)入车道监控初始化
116、1)算法开始:获取服务器时间,初始化主监控界面,由主机号从数据库读取此主机号对应的车道号,转①;①判断是否入车道,如果是入车道转②,出车道转②初始化入场监控界面类,对于此入车道号初始化一个车道(根据车道号读取数据库的车道信息,包括车道各种参数等),转③;③初始化入车道监控类,构造监控格子(监控界面和下面的识别结果显示方格),转④;④初始化相机结构体,转⑤;⑤根据②读取的参数,初始化该车道,转⑥;⑥开启相机监控线程,转⑦;⑦根据②获取的车道参数,判断是否有辅助相机,如果有转⑧,否则转⑨;⑧开启辅助相机线程,转⑨;⑨初始化入车道监控类完毕,将入车道监控格子加到入场监控界面上。⑩入场监控界面类初始完毕,转将入场监控界面添加到主监控界面上,实施监控转2)﹔出场监控界面和入场监控界面的初始化基本一致,转2);
117、2)监控界面类初始化成功,算法结束;
118、整个监控界面的初始化算法是利用多线程,针对每一个车道的每一台相机开启一个识别线程,对每一个监控类赋予不同职责,确保多线程识别准确性;
119、算法流程形式化:1)算法开始,读取主机号,初始化主监控界面,转①;①根据主机号从数据库读取所有属于该主机的车道号与车道类型,转②;②根据车道类型判断是否有入场车道号,如果有转③;是否有出场车道号,如果有转⑤:都没有转2);③赋值i=0,根据n个出场车道号调用出场监控界面类,判断i==n,如果为false转④,为true,转2);④对于每一个入场车道号,初始化该车道,开启车道监控程序,转2);⑤赋值j=0,根据n个出场车道号调用出场监控界面类,判断j==n,如果为false转⑥,为true,转2);⑥对于每一个出场车道号,初始化该车道,开启车道监控程序,转2)﹔2)算法结束。
120、与现有技术相比,本技术以减少停车场系统的人工干预,提升停车系统的智能程度为主线,按照车辆在系统中从入场到出场的顺序,重点论述了本系统与其它智能停车场系统不同的部分:如何实现软硬件高效结合来提高停车场智能程度;如何利用算法设计来弥补硬件设备的不足,本技术的创新点和优势在于:
121、(1)本技术提出了收费亭多类型双相机识别算法,解决了不同型号、不同类型的相机组成双相机识别的问题,实现了一个车道可以配置2台不同类型的相机独立监控,防止漏车现象的发生,从两台相机识别的车牌中获取一个识别较为准确的车牌,在充分利用相机性能的基础上,确保了相机的识别率,同时针对相机特性,基于多线程和神经网络技术建立了基于四种不同类型、不同型号相机的双相机识别算法,解决了监控系统的任意一个车道支持不同类型、不同型号的相机组合成双相机识别的问题,车辆识别的准确率和鲁棒性大幅提高。
122、(2)提出了停车场多门多车道多设备识别方法,解决了多种类型的相机与etc以及led联合监控的问题。建立了可维护的智能收费模块,设计了多种基于时空的收费标准与收费策略并实现多种智能收费渠道,系统构造出可维护的停车场模型和智能收费模块,确保了停车场系统收费的统一性与特殊性,实现了注册车辆的不停车收费。
123、(3)提出了基于自学习的近似字典和模糊匹配算法,使车辆车牌在相机识别错误的情况下也能实现车辆自动出场,实验结果表明模糊匹配算法使停车场系统的智能程度提高了约17%,由此解决了在相机识别错误情况下,车辆自动出场的问题,减少了人工的干预,实现智能收费,提高了停车场系统的智能程度。
124、(4)本技术提出了多个收费亭脱机处理方案,基于相机的特性建立收费亭脱机出场处理与相机脱机处理方法,由此解决了在停车场断网的情况下,车辆自动出场的问题,停车场断网之后车辆也能自动出场。
125、(5)针对传统停车场在每个门处设置一个或多个收费亭管理车道的情况,提出了一套完整高效的入场停车流程和车辆出场流程,采用对停车场系统的建模与面向对象的方法使得客户端同时监控多个收费亭的多个车道,一个收费亭端的客户端不仅可以同时控制收费亭端所有的出车道和入车道,还可以授权控制其它收费亭的出车道和入车道。
本文地址:https://www.jishuxx.com/zhuanli/20240731/193400.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表