核燃料组件抽插力自动测量设备及方法与流程
- 国知局
- 2024-08-02 13:05:01
本发明属于核电,具体涉及一种核燃料组件抽插力自动测量设备及方法。
背景技术:
1、核燃料相关组件对反应堆堆芯稳定运行起着至关重要的作用,通过控制棒组件在导向管部件管内提升高度控制反应堆速率,通过可燃毒物组件吸收堆芯内中子,维持堆芯内环境稳定,通过中子源组件对反应堆进行起堆。相关组件在导向管部件内下落及提升时间必须严格控制,因此必须严格测量相关组件在燃料组件中下落过程抽插力。相关技术中,普遍采用人工观察采样的方法测量相关组件在燃料组件中下落过程抽插力,且测量过程中需要人工控制棒通过导向疏进入燃料组件导向管内,无法保障测量的准确性和测量效率。
技术实现思路
1、为克服相关技术中存在的问题,提供了一种核燃料组件抽插力自动测量设备及方法。
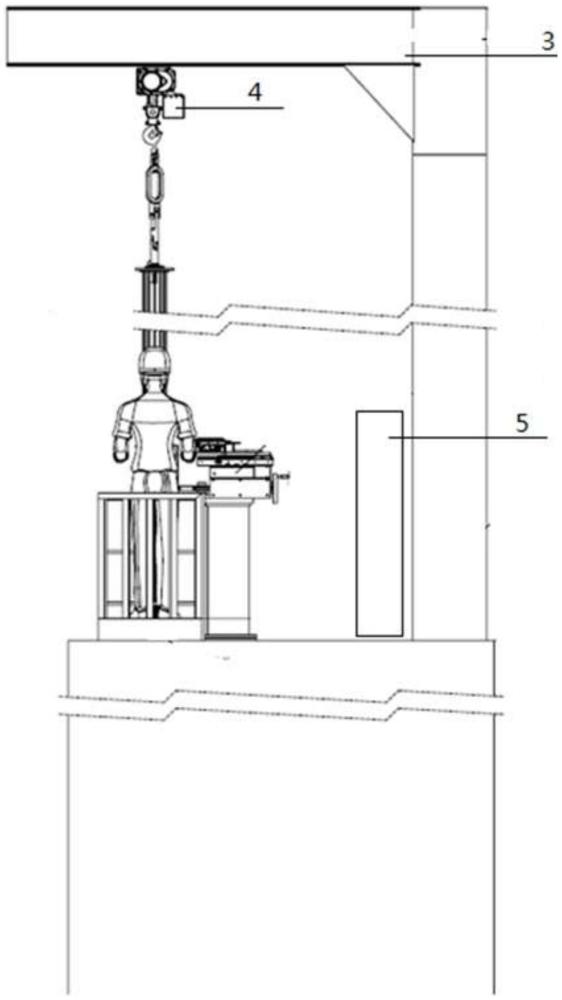
2、根据本公开实施例的一方面,提供一种核燃料组件抽插力自动测量设备,所述设备包括:悬臂吊车、升降电机、拉力传感器、对中装置、基座、控制装置,所述控制装置分别与所述悬臂吊车、升降电机、控制装置、拉力传感器、对中装置连接;
3、被检测的相关组件通过所述拉力传感器与所述升降电机连接,所述升降电机与所述悬臂吊车连接,所述基座固定安装在地坑底部,所述基座上端固定连接被检测的燃料组件,所述对中装置固定连接在所述地坑坑口位置,所述控制装置采用以下步骤确定所述相关组件与所述燃料组件抽插力:
4、步骤1,所述控制装置控制所述悬臂吊车将相关组件移动至所述燃料组件的正上方,所述相关组件位于第一初始位置,所述相关组件底端靠近所述燃料组件顶端,所述相关组件各棒体未插入对应的导向管;
5、步骤2,在所述相关组件位于第一初始位置的情况下,所述控制装置控制所述对中装置对所述相关组件的各棒体进行限位,使得所述相关组件的每个棒体正对对应的导向管;
6、步骤3,在步骤2后,所述控制装置控制所述升降电机带动所述相关组件以预设速度从所述第一初始位置下降至第一截止位置,使得所述相关组件的各棒体插入对应导向管预设距离后,接着控制所述相关组件从所述第一截止位置回升至所述第一初始位置;
7、步骤4,所述控制装置在控制所述相关组件从所述第一初始位置下降至第一截止位置的过程中,实时获取所述拉力传感器采集的受力数据;
8、步骤5,所述控制装置根据获取到的受力数据确定抽插力。
9、在一种可能的实现方式中,所述悬臂吊车包括:立柱、悬臂、旋转机构,在所述燃料组件未入所述地坑时,所述悬臂位于第二初始位置,使得所述燃料组件能够进入并安装在所述地坑中,步骤1包括:
10、步骤10,所述燃料组件在地坑就位后,所述控制装置控制所述旋转电机带动所述悬臂从所述第二初始位置水平旋转至第二截止位置,使得所述相关组件位于所述燃料组件正上方;
11、步骤11,所述悬臂旋转至第二截止位置的情况下,所述控制装置控制所述立柱边缘的磁性装置上电具有磁性,吸附住所述悬臂,从而使得所述悬臂静止在第二截止位置。
12、在一种可能的实现方式中,所述方法还包括:
13、步骤12,在所述步骤3后,所述控制装置控制所述立柱边缘的磁性物质消除磁性解除对所述悬臂的吸附后,控制所述旋转电机带动所述悬臂从所述第二截止位置水平旋转至第二初始位置。
14、在一种可能的实现方式中,对中装置包括主梳和副梳,所述主梳位于第一水平面,所述主梳具有多条并列的沿水平x轴方向设置的第一定位条,所述副梳位于第二水平面,所述副梳具有多条并列的沿水平y轴方向设置的第一定位条,第一水平面位于第二水平面上方,所述步骤2包括:
15、步骤20,在所述相关组件位于第一初始位置的情况下,所述控制装置控制所述主梳沿第一水平面x轴方向朝向所述相关组件运动,使得各第一定位条插入所述相关组件各棒体中间,限定各棒体在水平y轴的位置;
16、步骤21,在步骤20后,所述控制装置控制所述副梳沿第二水平面y轴方向朝向所述相关组件运动,使得各第二定位条插入所述相关组件各棒体中间,限定各棒体在水平x轴的位置,从而使得所述相关组件的各棒体正对对应的导向管。
17、在一种可能的实现方式中,所述基座包括多个不同高度的定位槽和滑台,不同高度的定位槽用于固定不同型号燃料组件,所述控制装置通过滑台控制不同定位槽滑动至检测位置或从检测位置滑出。
18、在一种可能的实现方式中,步骤5包括:所述控制装置将获取到的受力数据中的最大值确定为抽插力。
19、在一种可能的实现方式中,所述控制装置包括显示屏,所述显示屏显示的用户界面用于展示所述控制装置实时获取的受力数据和确定的抽插力。
20、根据本公开实施例的另一方面,提供一种核燃料组件抽插力自动测量方法,所述方法应用于如权利要求1-7中任意一项所述的核燃料组件抽插力自动测量设备中,所述方法包括:
21、步骤1,所述控制装置控制所述悬臂吊车将相关组件移动至所述燃料组件的正上方,所述相关组件位于第一初始位置,所述相关组件底端靠近所述燃料组件顶端,所述相关组件各棒体未插入对应的导向管;
22、步骤2,在所述相关组件位于第一初始位置的情况下,所述控制装置控制所述对中装置对所述相关组件的各棒体进行限位,使得所述相关组件的每个棒体正对对应的导向管;
23、步骤3,在步骤2后,所述控制装置控制所述升降电机带动所述相关组件以预设速度从所述第一初始位置下降至第一截止位置,使得所述相关组件的各棒体插入对应导向管预设距离后,接着控制所述相关组件从所述第一截止位置回升至所述第一初始位置;
24、步骤4,所述控制装置在控制所述相关组件从所述第一初始位置下降至第一截止位置的过程中,实时获取所述拉力传感器采集的受力数据;
25、步骤5,所述控制装置根据获取到的受力数据确定抽插力。
26、根据本公开实施例的另一方面,提供一种核燃料组件抽插力自动测量装置,所述装置应用于如权利要求1-7中任意一项所述的核燃料组件抽插力自动测量设备中,所述装置包括:
27、第一控制模块,用于控制所述悬臂吊车将相关组件移动至所述燃料组件的正上方,所述相关组件位于第一初始位置,所述相关组件底端靠近所述燃料组件顶端,所述相关组件各棒体未插入对应的导向管;
28、第二控制模块,用于在所述相关组件位于第一初始位置的情况下,控制所述对中装置对所述相关组件的各棒体进行限位,使得所述相关组件的每个棒体正对对应的导向管;
29、第三控制模块,用于在所述相关组件的各棒体被限位后,控制所述升降电机带动所述相关组件以预设速度从所述第一初始位置下降至第一截止位置,使得所述相关组件的各棒体插入对应导向管预设距离后,接着控制所述相关组件从所述第一截止位置回升至所述第一初始位置;
30、第四控制模块,用于在控制所述相关组件从所述第一初始位置下降至第一截止位置的过程中,实时获取所述拉力传感器采集的受力数据;
31、第五控制模块,用于根据获取到的受力数据确定抽插力。
32、根据本公开实施例的另一方面,提供一种非易失性计算机可读存储介质,其上存储有计算机程序指令,所述计算机程序指令被处理器执行时实现上述方法。
33、本公开的有益效果在于:本公开的核燃料组件抽插力自动测量装置将燃料组件与相关组件放入指定位置,通过设备使相关组件自动对中燃料组件导向管口,再以稳定的速度自动下降相关组件到设定位置,读取抽插力最大值后自动上升,最后脱离导向管口上升到设定位置。由此解决了肉眼读数不稳定和相关棒无法准确对中的问题,提高岗位的检测效率。
本文地址:https://www.jishuxx.com/zhuanli/20240801/238673.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
中子屏蔽材料及其制造方法
下一篇
返回列表