一种安全壳水膜覆盖率自动化检测装置及方法与流程
- 国知局
- 2024-08-02 13:15:51
本发明涉及核电站安全设备,特别是涉及一种安全壳水膜覆盖率自动化检测装置及方法。
背景技术:
1、核电站中的安全壳是构成压水反应堆的关键防护件,安全壳的作用在于当核反应堆出现严重的核事故时,也可以依靠坚固的安全壳有效防止放射性物质的外泄,避免对环境和公众造成影响。
2、安全壳非能动冷却系统用于核电站中,主要包括安全壳外表面上设置有若干个c型块,c型块上设置有挂设有挡流板,安全壳的顶部设置有储水箱。在发生冷却剂丧失事故和主蒸汽管道破裂事故时,安全壳内压力升高,在达到安全壳高压整定值后自动触发安全壳非能动冷却系统开启,冷却水从安全壳顶部的储水箱流出,经过流量分配装置分配后在安全壳的外表面形成液膜。沿安全壳外表面流动的降液膜具有高换热系数、高热流密度、动力消耗小等优点,能将安全壳内的热量通过一系列能量传递最终排向环境,降低了安全壳内部压力,保证了安全壳的完整性。
3、基于非能动安全壳冷却系统在整个非能动核电机组安全系统中的重要性,水膜覆盖率试验成为了核电机组在役期间的定期试验项目。进行试验时,需在水箱满水位时,对安全壳起拱线处的水膜覆盖率进行测量。但因挡流板挂设在c型块上,故安全壳外表面和挡流板之间的间隙较小,对安全壳起拱线处的水膜覆盖率检测时需要将挡流板拆除,操作复杂并且拆除挡流板时会对安全壳的水膜覆盖率的有效性产生影响。
技术实现思路
1、鉴于以上所述现有技术的缺点,本发明的目的在于提供一种安全壳水膜覆盖率自动化检测装置及方法,用于解决现有技术中对安全壳起拱线处水膜覆盖率检测过程中,需要拆除挡流板操作复杂并且对水膜覆盖率的有效性产生影响的问题。
2、为实现上述目的及其他相关目的,本发明提供一种安全壳水膜覆盖率自动化检测装置,应用于安全壳水膜覆盖率检测中;所述安全壳上设置有若干个c型块,若干个所述c型块上设置有挡流板;包括巡检机器人、投放机械臂、以及探头组件,所述探头组件设置在巡检机器人上,用于采集安全壳外表面水膜的视频图像并检测水膜覆盖率;所述巡检机器人设置在c型块上,用于带动探头组件运动;所述投放机械臂用于将巡检机器人、以及探头组件放入安全壳外表面和挡流板之间的间隙中。
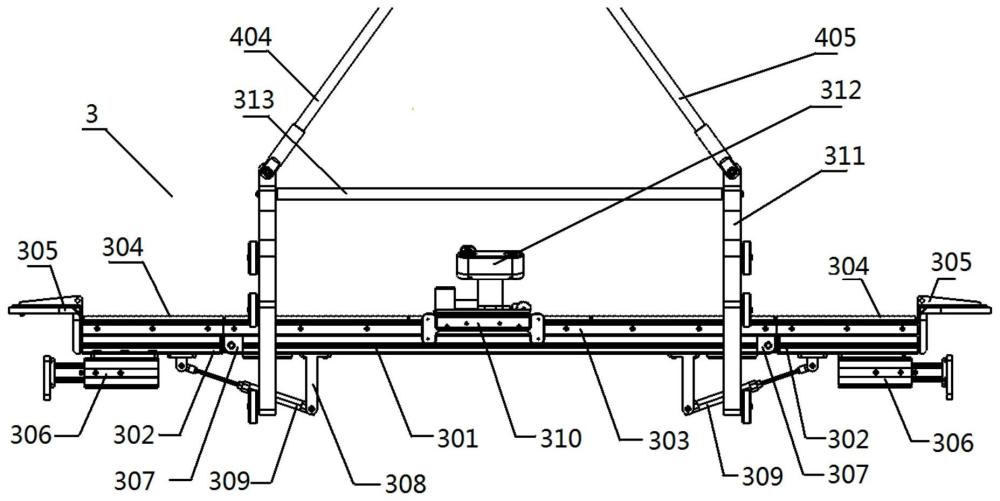
3、优选的,所述巡检机器人包括骨架、导轨、齿条、以及小车组件,所述导轨、以及齿条均设置在骨架上;所述小车组件与导轨连接,所述小车组件与齿条传动连接、并沿导轨运动。
4、优选的,所述小车组件包括小车框架、导向轮、传动齿轮、以及驱动电机,所述导向轮设置在小车框架的底端两侧、且所述导向轮与导轨滚动连接;所述传动齿轮可转动设置在小车框架中、且所述传动齿轮与齿条啮合;所述驱动电机设置在小车框架中,且所述驱动电机与传动齿轮传动连接。
5、优选的,所述骨架包括主骨架、以及副骨架,所述副骨架的数量为两个,两个所述副骨架铰接在主骨架的两端;所述主骨架与副骨架之间还设置有旋转驱动组件,所述旋转驱动组件一端与主骨架连接,另一端与副骨架连接;所述副骨架远离主骨架的一端端部设置有支撑脚,所述支撑脚与c型块的顶面抵接。
6、优选的,所述副骨架与主骨架之间设置有旋转关节,所述副骨架与主骨架通过旋转关节铰接;两个所述副骨架与主骨架之间通过旋转关节、以及旋转驱动组件构成“п”形或“一”形。
7、优选的,所述副骨架上还设置有支撑驱动组件,所述支撑驱动组件设置在支撑脚的下方侧;当支撑脚抵接在c型块的顶面时,所述支撑驱动组件抵接在c型块的侧面上。
8、优选的,所述安全壳水膜覆盖率自动化检测装置还包括防滚架,所述防滚架设置在主骨架的中部,所述防滚架的侧面截面形状为u形,所述防滚架上设置有若干个滚轮;当将巡检机器人放入安全壳外表面和挡流板之间的间隙中时,若干个所述滚轮分别与安全壳和挡流板连接。
9、优选的,所述投放机械臂包括若干根长臂、以及若干个机械臂关节,相邻长臂之间通过机械臂关节连接;所述长臂采用碳纤维材质,所述长臂采用中空件,用于容纳巡检机器人、以及探头组件中的电缆。
10、优选的,所述安全壳水膜覆盖率自动化检测装置还包括工控机,所述工控机与巡检机器人、以及探头组件通讯连接;所述探头组件包括视频探头、测速模块、辅助光源、以及除雾部件,所述工控机分别与测速模块、视频探头通讯连接,用于采集安全壳外表面水膜的视频图像;所述辅助光源设置在视频探头的外侧,用于辅助视频探头采集图像;所述除雾部件设置在视频探头的前端,用于保证采集图像的清晰度。
11、为实现上述目的或其他目的,本发明还公开一种安全壳水膜覆盖率自动化检测方法,采用上述的安全壳水膜覆盖率自动化检测装置,步骤在于:
12、s1:通过投放机械臂将巡检机器人、以及探头组件放入安全壳外表面和挡流板之间的间隙中;
13、s2:所述巡检机器人设置在c型块上;
14、s3:所述探头组件在巡检机器人的带动下,采集安全壳外表面水膜的视频图像并检测水膜覆盖率。
15、如上所述,本发明涉及的安全壳水膜覆盖率自动化检测装置及方法,具有以下有益效果:
16、1、本发明涉及的安全壳水膜覆盖率自动化检测装置及方法,设置有探头组件,能够有效保证水膜覆盖率检测的精度。
17、2、本发明涉及的安全壳水膜覆盖率自动化检测装置及方法,设置有巡检机器人,巡检机器人的骨架可以实现“п”形与“一”形之间的转换,从而在巡检机器人在“п”形时,可以越起拱线上方侧的c型块,然后巡检机器人转换成“一”形,固定在起拱线下方侧的c型块上,实现探头组件对起拱线附近特定区域进行水膜覆盖率检测。
18、3、本发明涉及的安全壳水膜覆盖率自动化检测装置及方法,巡检机器人中设置有防滚架,当将巡检机器人放入安全壳和挡流板之间的间隙时,将巡检机器人与安全壳和挡流板之间的滑动摩擦转变成滚动摩擦,减少巡检机器人与安全壳和挡流板之间的碰撞。
19、4、本发明涉及的安全壳水膜覆盖率自动化检测装置及方法,设置的投放机械臂包括若干根长臂、以及若干个机械臂关节,所述机械臂关节可以按需扭曲,并且长臂采用中空件,用于容纳巡检机器人和探头组件的线缆,有效避免在巡检机器人放入安全壳与挡流板之间时,电缆与安全壳外表面以及挡流板的内表面接触,避免对试验结果造成影响。
技术特征:1.一种安全壳水膜覆盖率自动化检测装置,应用于安全壳(1)水膜覆盖率检测中;所述安全壳(1)上设置有若干个c型块(102),若干个所述c型块(102)上设置有挡流板(2);其特征在于:包括巡检机器人(3)、投放机械臂(4)、以及探头组件(312),所述探头组件(312)设置在巡检机器人(3)上,用于采集安全壳(1)外表面水膜的视频图像并检测水膜覆盖率;所述巡检机器人(3)设置在c型块(102)上,用于带动探头组件(312)运动;所述投放机械臂(4)用于将巡检机器人(3)、以及探头组件(312)放入安全壳(1)外表面和挡流板(2)之间的间隙中。
2.根据权利要求1所述的安全壳水膜覆盖率自动化检测装置,其特征在于:所述巡检机器人(3)包括骨架、导轨(303)、齿条(304)、以及小车组件(310),所述导轨(303)、以及齿条(304)均设置在骨架上;所述小车组件(310)与导轨(303)连接,所述小车组件(310)与齿条(304)传动连接、并沿导轨(303)运动。
3.根据权利要求2所述的安全壳水膜覆盖率自动化检测装置,其特征在于:所述小车组件(310)包括小车框架(3100)、导向轮(3104)、传动齿轮(3103)、以及驱动电机(3101),所述导向轮(3104)设置在小车框架(3100)的底端两侧、且所述导向轮(3104)与导轨(303)滚动连接;所述传动齿轮(3103)可转动设置在小车框架(3100)中、且所述传动齿轮(3103)与齿条(304)啮合;所述驱动电机(3101)设置在小车框架(3100)中,且所述驱动电机(3101)与传动齿轮(3103)传动连接。
4.根据权利要求2所述的安全壳水膜覆盖率自动化检测装置,其特征在于:所述骨架包括主骨架(301)、以及副骨架(302),所述副骨架(302)的数量为两个,两个所述副骨架(302)铰接在主骨架(301)的两端;所述主骨架(301)与副骨架(302)之间还设置有旋转驱动组件(309),所述旋转驱动组件(309)一端与主骨架(301)连接,另一端与副骨架(302)连接;所述副骨架(302)远离主骨架(301)的一端端部设置有支撑脚(305),所述支撑脚(305)与c型块(102)的顶面抵接。
5.根据权利要求4所述的安全壳水膜覆盖率自动化检测装置,其特征在于:所述副骨架(302)与主骨架(301)之间设置有旋转关节(307),所述副骨架(302)与主骨架(301)通过旋转关节(307)铰接;两个所述副骨架(302)与主骨架(301)之间通过旋转关节(307)、以及旋转驱动组件(309)构成“п”形或“一”形。
6.根据权利要求4所述的安全壳水膜覆盖率自动化检测装置,其特征在于:所述副骨架(302)上还设置有支撑驱动组件(306),所述支撑驱动组件(306)设置在支撑脚(305)的下方侧;当支撑脚(305)抵接在c型块(102)的顶面时,所述支撑驱动组件(306)抵接在c型块(102)的侧面上。
7.根据权利要求4-6任一项所述的安全壳水膜覆盖率自动化检测装置,其特征在于:还包括防滚架,所述防滚架设置在主骨架(301)的中部,所述防滚架的侧面截面形状为u形,所述防滚架上设置有若干个滚轮(3113);当将巡检机器人(3)放入安全壳(1)外表面和挡流板(2)之间的间隙中时,若干个所述滚轮(3113)分别与安全壳(1)和挡流板(2)连接。
8.根据权利要求1所述的安全壳水膜覆盖率自动化检测装置,其特征在于:所述投放机械臂(4)包括若干根长臂、以及若干个机械臂关节,相邻长臂之间通过机械臂关节连接;所述长臂采用碳纤维材质,所述长臂采用中空件,用于容纳巡检机器人(3)、以及探头组件(312)中的电缆。
9.根据权利要求1所述的安全壳水膜覆盖率自动化检测装置,其特征在于:还包括工控机,所述工控机与巡检机器人(3)、以及探头组件(312)通讯连接;所述探头组件(312)包括视频探头、测速模块、辅助光源、以及除雾部件,所述工控机分别与测速模块、视频探头通讯连接,用于采集安全壳(1)外表面水膜的视频图像;所述辅助光源设置在视频探头的外侧,用于辅助视频探头采集图像;所述除雾部件设置在视频探头的前端,用于保证采集图像的清晰度。
10.一种安全壳水膜覆盖率自动化检测方法,采用权利要求1-9任一项所述的安全壳水膜覆盖率自动化检测装置,其特征在于:步骤如下:
技术总结本发明提供一种安全壳水膜覆盖率自动化检测装置及方法,应用于安全壳水膜覆盖率检测中;安全壳上设置有若干个C型块,若干个所述C型块上设置有挡流板;包括巡检机器人、投放机械臂、以及探头组件,探头组件设置在巡检机器人上,用于采集安全壳外表面水膜的视频图像并检测水膜覆盖率;巡检机器人设置在C型块上,用于带动探头组件运动;投放机械臂用于将巡检机器人、以及探头组件放入安全壳外表面和挡流板之间的间隙中。本发明设置有巡检机器人,巡检机器人的骨架可以实现“П”形与“一”形之间的转换,从而在巡检机器人在“П”形时,可以越起拱线上方侧的C型块并固定在起拱线下方侧的C型块上,无需拆除挡流板即可进行水膜覆盖率检测。技术研发人员:刘程超,袁会勇,刘一舟,樊钊,张宝军,黄海涛受保护的技术使用者:国核电站运行服务技术有限公司技术研发日:技术公布日:2024/6/30本文地址:https://www.jishuxx.com/zhuanli/20240801/239092.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表