一种主动抑制炮口振动的PID控制方法和装置与流程
- 国知局
- 2024-08-02 13:15:41
本发明属于中大口径炮的高低随动系统控制领域,特别是涉及一种主动抑制炮口振动的pid控制方法和装置。
背景技术:
1、中大口径炮的身管体积大、重量重、炮口动能高,弹丸出炮口瞬时引起的炮口振动幅值大、振动衰减周期长,炮口振动影响着装备射速、射击精度的提高。现有解决炮口振动的主要途径包括有:一是通过发射动力学研究,从炮本体质量、刚度、结构阻尼匹配来实现更快的振动衰减,但是其效果有限,因为炮体结构确定后,其结构阻尼确定,但一般结构阻尼较小,难以实现炮口振幅的快速衰减;另外,炮本体一般不能在基座、连接部位加装高阻尼结构,影响炮整体的安全性。二是国内外有文献对在身管上增加吸振器开展了大量研究,达到了一定效果,但由于工程实施不便、应用困难,国内外鲜有应用。三是通过随动系统进行炮口振动辅助抑制,工程实践已表明具有较好的抑制效果;随动系统作为炮的组成之一,主要目的在于接收火控系统的射击诸元,根据射击诸元驱动炮高低、方向瞄准传动装置实现对目标的实时跟瞄。
2、由于随动系统主要是对高低、方向的位置环进行控制,炮口振动反映了高低位置环的变动,炮口振动角位移与射击诸元之差,即跟踪误差的不断变化正是随动系统需要不断纠正位置环偏差的基本功能,而随动系统pid控制器相当于给炮本体施加了一个外部大阻尼能量,能够加快炮口振动的衰减时间和快速降低炮口振幅。但这是基于pid控制器的炮口振动被动控制,对于炮口振动衰减周期与发射间隔周期基本接近的中大口径火炮、舰炮、新概念炮仍显不够,具体地,现有方法虽然能够实现对振动的抑制,但是是通过试探、逐步逼近的方式来进行振动抑制的,导致抑制振动的时间相对较长,而现有连续发射的火炮的发射间隔时间较短,即抑制时间大于发射间隔,存在连发时下一发发射时刻炮口未完全衰减带来炮口扰动、进而影响射击精度的问题。
3、综上,现有随动系统抑制振动的方法难以快速消除连发射击时下一发发射前的炮口振动现象,进而影响射击精度。
技术实现思路
1、本发明的目的在于提供一种主动抑制炮口振动的pid控制方法和装置,以解决现有技术中随动系统抑制振动的方法难以快速消除连发射击时下一发发射前的炮口振动、进而影响射击精度的问题。
2、为实现上述目的,本发明所提供的主动抑制炮口振动的pid控制方法和装置的技术方案是:
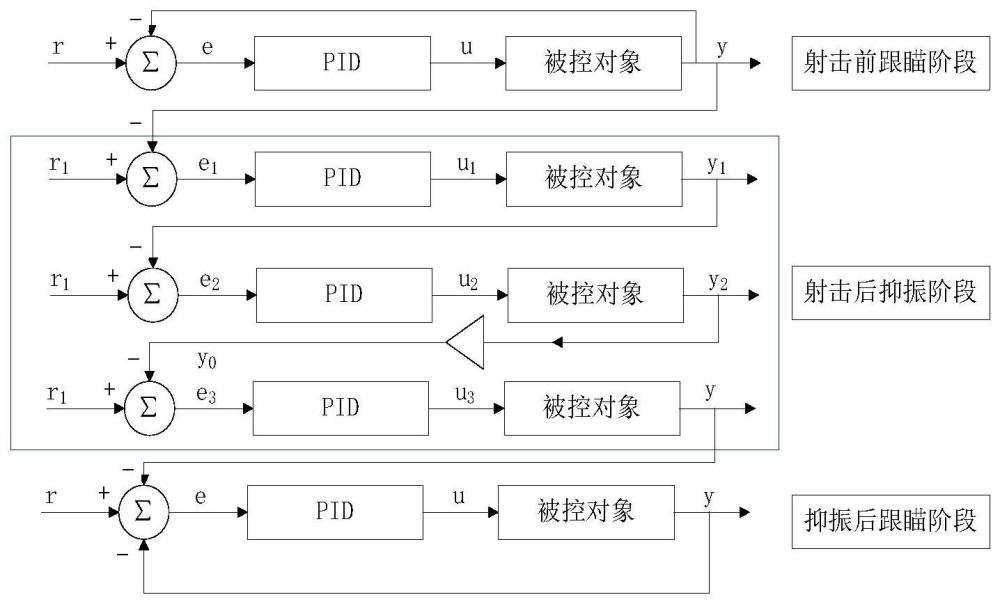
3、一种主动抑制炮口振动的pid控制方法,该方法包括如下步骤:若接收到射击的火控射角指令时,进行抱闸射击并在射击后进行炮口振动抑制;炮口振动抑制过程为:根据被控对象上一次动作后的射角位置与火控射角指令之间的位置偏差控制被控对象到位;在到位后,计算射击后被控对象的射角位置与火控射角指令之间的位置偏差,利用pid控制器将该位置偏差转换为位置指令,根据位置指令通过瞄准传动装置控制被控对象消减振动能量;射击后被控对象的射角位置是根据历史实测的射击后炮口振动角位移曲线上的波峰值、波谷值确定的。
4、作为进一步地改进,射击后被控对象的射角位置包括有射角的大小和射角的方向,其中,射角的大小是根据射击后炮口振动角位移曲线上从射击时刻开始的设定时间内的波峰值或波谷值的最大值确定的。
5、作为进一步地改进,炮口振动角位移曲线包括有下射界、中间射界、上射界对应的角位移曲线,所述波峰值为同一射击条件下各组角位移曲线之间对应的各波峰值的平均值,所述波谷值为同一射击条件下各组角位移曲线之间对应的各波谷值的平均值。
6、作为进一步地改进,射角的大小是根据各射击后炮口振动角位移曲线上波峰值绝对值和波谷值绝对值中的最大值确定的。
7、作为进一步地改进,射角的方向的确定过程为:从炮口振动的角位移曲线中确定出第一数据点和第二数据点,根据第二数据点相对第一数据点的变化方向作为射角的方向;第一数据点为射击时刻的数据点,第二数据点为击发时刻后一个控制周期内的数据点。
8、作为进一步地改进,所述控制被控对象到位的过程为:计算被控对象上一次动作后的射角位置与火控射角指令之间的位置偏差,利用pid控制器将该位置偏差转换为位置指令,根据该位置指令通过瞄准传动装置控制被控对象第一次到位;计算被控对象第一次到位后的射角位置与火控射角指令之间的位置偏差,利用pid控制器将该位置偏差转换为位置指令,根据该位置指令通过瞄准传动装置控制被控对象第二次到位。
9、作为进一步地改进,在抱闸射击前的瞄准过程为:确定出被控对象上一次动作后的射角位置与火控射角指令之间的位置偏差,pid控制器将该位置偏差转换为位置指令,瞄准传动装置根据位置指令对被控对象进行控制。
10、本发明还公开了一种主动抑制炮口振动的pid控制装置,该装置包括有随动系统,该随动系统利用pid控制器根据上述的主动抑制炮口振动的pid控制方法的实施例实现抑制炮口振动的pid控制。
11、本发明的主动抑制炮口振动的pid控制方法的有益效果是:本发明为改进型发明,该方法首先在进行射击后对身管进行振动抑制,保障下一发弹丸也能准确射击出去;在进行振动抑制时,通过同一类炮历史实测的射击后炮口振动角位移曲线来预测出当前炮射击后炮口振动响应期间的射角位置,通过控制被控对象精准的反向能量补偿来抑制振动,使炮口振动幅值得到更快衰减、炮口振动总时间得到更快缩短;在保持中大口径炮射速不变的条件下,连发时下一次发射时刻的炮口处于无振动状态,不会对弹丸出炮口带来初始扰动和射击精度问题;另一方面,随着抑制振动时长的缩短,可以适当提高中大口径炮的射速指标。
技术特征:1.一种主动抑制炮口振动的pid控制方法,其特征在于,该方法包括如下步骤:
2.根据权利要求1所述的主动抑制炮口振动的pid控制方法,其特征在于,所述射击后被控对象的射角位置包括有射角的大小和射角的方向,其中,射角的大小是根据射击后炮口振动角位移曲线上从射击时刻开始的设定时间内的波峰值或波谷值的最大值确定的。
3.根据权利要求2所述的主动抑制炮口振动的pid控制方法,其特征在于,炮口振动角位移曲线包括有下射界、中间射界、上射界对应的角位移曲线,所述波峰值为同一射击条件下各组角位移曲线之间对应的各波峰值的平均值,所述波谷值为同一射击条件下各组角位移曲线之间对应的各波谷值的平均值。
4.根据权利要求2所述的主动抑制炮口振动的pid控制方法,其特征在于,射角的大小是根据各射击后炮口振动角位移曲线上波峰值绝对值和波谷值绝对值中的最大值确定的。
5.根据权利要求2所述的主动抑制炮口振动的pid控制方法,其特征在于,射角的方向的确定过程为:从炮口振动角位移曲线中确定出第一数据点和第二数据点,根据第二数据点相对第一数据点的变化方向作为射角的方向;第一数据点为射击时刻的数据点,第二数据点为击发时刻后一个控制周期内的数据点。
6.根据权利要求1所述的主动抑制炮口振动的pid控制方法,其特征在于,所述控制被控对象到位的过程为:计算被控对象上一次动作后的射角位置与火控射角指令之间的位置偏差,利用pid控制器将该位置偏差转换为位置指令,根据该位置指令通过瞄准传动装置控制被控对象第一次到位;计算被控对象第一次到位后的射角位置与火控射角指令之间的位置偏差,利用pid控制器将该位置偏差转换为位置指令,根据该位置指令通过瞄准传动装置控制被控对象第二次到位。
7.根据权利要求1所述的主动抑制炮口振动的pid控制方法,其特征在于,在抱闸射击前的瞄准过程为:确定出被控对象上一次动作后的射角位置与火控射角指令之间的位置偏差,pid控制器将该位置偏差转换为位置指令,瞄准传动装置根据位置指令对被控对象进行控制。
8.一种主动抑制炮口振动的pid控制装置,其特征在于,该装置包括有随动系统,该随动系统利用pid控制器根据权利要求1-7任意一项所述的主动抑制炮口振动的pid控制方法实现抑制炮口振动的pid控制。
技术总结本发明公开了一种主动抑制炮口振动的PID控制方法和装置,属于中大口径炮的高低随动系统控制领域,该方法首先在进行射击后对身管进行振动抑制,保障下一发弹丸也能在身管无初始扰动时刻射击出去;在进行振动抑制时,通过同一类炮历史实测的射击后炮口的振动角位移曲线来预测出当前炮射击后炮口振动响应期间的射角位置,通过控制被控对象精准的反向能量补偿来抑制振动,使炮口振动幅值得到更快衰减、炮口振动总时间得到更快缩短;在保持中大口径炮射速不变的条件下,连发时下一次发射时刻的炮口处于无振动状态,不会对弹丸出炮口带来初始扰动和射击精度问题;另一方面,随着抑制振动时长的缩短,可以适当提高中大口径炮的射速指标。技术研发人员:邱群先,李鹏飞,王丹峰,许俊,高博,赵玺受保护的技术使用者:中国船舶集团有限公司第七一三研究所技术研发日:技术公布日:2024/6/30本文地址:https://www.jishuxx.com/zhuanli/20240801/239079.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表