一种爆破机器人的制作方法
- 国知局
- 2024-08-02 13:26:03
本发明涉及爆破机器人,具体为一种爆破机器人。
背景技术:
1、在铁路、矿山、水库、隧道、旧建筑物等工程中,通常采用爆破的形式进行辅助施工,随着科学技术的发展,以远程控制为主的爆破机器人为基础,实现炸药的远程填充,可以极大的提高安全性,同时提高炸药的填充效率;
2、公开号为(cn112157662b)中涉及到一种爆破机器人,包括行走越障
3、底盘、机械臂底座、机械臂、机械爪、电动推杆、工控机和采集装置,电动推杆用于将机械爪上夹持的塞孔物推入需堵塞孔中,通过行走机器人配合机械手对炸药进行安装,但是此方式存在较多弊端,一方面其在进行运输过程中,会经过颠簸路面,不方便进行减震缓冲,容易对炸药进行较大冲击,影响其后续引爆,另一方面孔洞位置较之于地面较为分散,其在到达孔洞处时,不方便进行便捷自动定位和内部清理,造成炸药安装难度增加,影响使用效果。
4、针对上述问题,急需在原有爆破机器人的基础上进行创新设计。
技术实现思路
1、本发明的目的在于提供一种爆破机器人,以解决上述背景技术提出现有的爆破机器人,不方便进行减震缓冲,同时不方便进行便捷自动定位和孔洞内部清理的问题,本发明技术方案针对现有技术解决方案过于单一的技术问题,提供了显著不同于现有技术的解决方案。
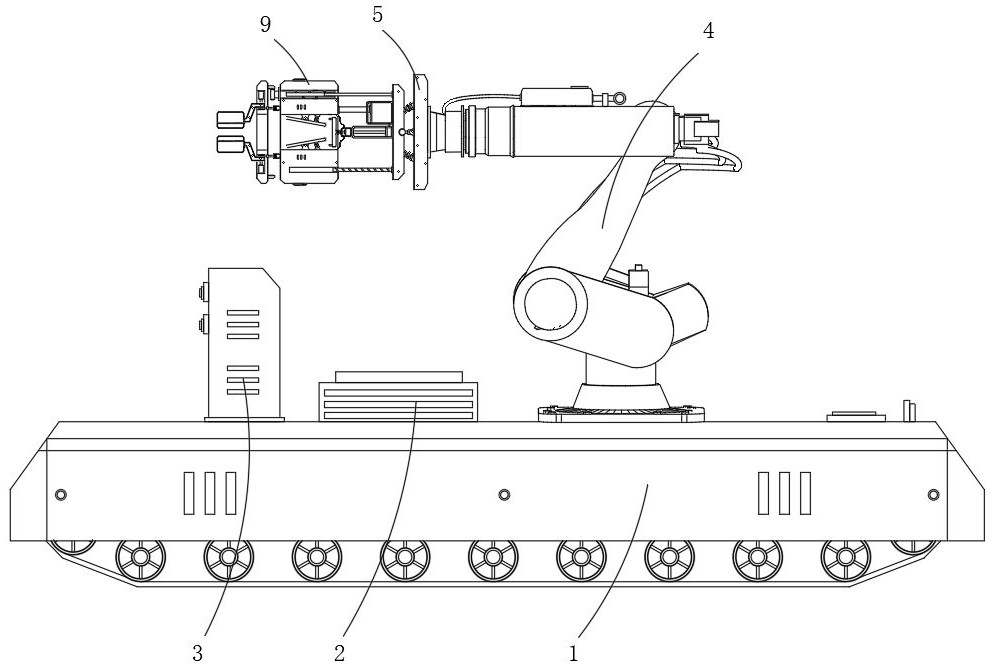
2、为实现上述目的,本发明提供如下技术方案:一种爆破机器人,包括行走基座,所述行走基座上安装有工控机和自动控制模块,所述自动控制模块包括远程遥控模块和视觉检测模块,所述远程遥控模块用于接受远程遥控命令,所述视觉检测模块用于传递机器视觉;
3、还包括多轴机械手,所述多轴机械手固定在行走基座上,且多轴机械手上固定有安装盘,并且安装盘上通过缓冲组件连接有装配盘,所述装配盘的底部通过电机连接有螺杆,且螺杆上螺纹套设有安装座,所述安装座的外侧通过伸缩连接组件连接有清理盘,所述清理盘外侧空腔内通过第二弹性伸缩杆连接有安装杆,且安装杆的内侧设置有电磁铁,并且电磁铁固定在清理盘外侧空腔内,所述安装杆的外侧固定有清理板,所述安装座的中部空心处的内壁上转动安装有定位板,且定位板与安装座中部空心处之间固定有第三弹簧;
4、旋转组件,所述旋转组件嵌入式安装在安装座的上方内部位置处,且旋转组件用于驱动清理盘转动;
5、推送组件,所述推送组件安装在装配盘外侧中心处,且推送组件用于将炸药推送进孔洞内。
6、优选的,所述缓冲组件包括第一弹性伸缩杆,所述第一弹性伸缩杆万向转动安装在安装盘的外侧中心处,且第一弹性伸缩杆的外端固定有安装球,并且安装球嵌入式设置在装配盘的内侧中心处,所述装配盘和安装盘之间固定有第一弹簧。
7、优选的,所述第一弹簧在装配盘上等角度分布,且第一弹簧呈倾斜设置。
8、优选的,所述伸缩连接组件包括伸缩油箱,所述伸缩油箱固定在安装座的外侧,且伸缩油箱内通过第二弹簧连接有伸缩头,并且伸缩头的一端在清理盘内侧空腔内嵌入式活动安装。
9、优选的,所述伸缩头的一端设计为球形在清理盘内侧环状空腔内贴合滑动,且伸缩头在安装座上等角度分布。
10、优选的,所述清理板设计为弧形结构,且清理板的内侧设计为钩形结构,并且清理板在清理盘上等角度分布。
11、优选的,所述定位板通过第三弹簧在安装座内弹性转动,且定位板初始状态倾斜设置。
12、优选的,所述旋转组件包括齿辊,所述齿辊嵌入式转动安装在安装座顶部的内部,且齿辊的外端啮合设置有齿环,并且齿环固定在清理盘的内侧,所述齿辊的内端空腔内伸入设置有导柱,且导柱固定在装配盘的外侧,所述导柱凸起位置处位于导槽内,且导槽开设在齿辊内端空腔侧壁上。
13、优选的,所述导柱凸起位置在导槽内贴合滑动,且导槽设计为螺旋状结构。
14、优选的,所述推送组件包括油液箱一,所述油液箱一固定在装配盘的外侧中心处,且油液箱一内设置有活塞杆一,所述活塞杆一伸出油液箱一的一端固定有油液箱二,且油液箱二内安装有活塞杆二,所述活塞杆二伸出油液箱二的一端固定有机械爪,所述装配盘的外侧固定有油液箱三,且油液箱三内安装有活塞杆三,并且活塞杆三的一端固定在安装座的内侧,所述油液箱三与油液箱一通过管路相通,所述油液箱二通过软管与伸缩油箱相通。
15、与现有技术相比,本发明的有益效果是:
16、1.本发明,通过设置缓冲组件,使得行走基座在行进时,可以进行上下左右多向缓冲保护,进一步的,在将清理板插入孔洞并释放后,通过清理板的自动展开,可以再次配合缓冲组件进行自动居中校正,使得炸药与孔洞中心相对应,避免影响后续炸药的投入,进一步的,行走基座在靠近孔洞时,清理板与孔洞内壁接触,具备一定的活动空间,可以根据孔洞内壁的位置通过伸缩连接组件调整机械爪的初始位置,进而在后续推送时,具备稳定的推送条件,使得炸药可以完全被推送进孔洞内,无需通过复杂的环境观察和深度位置计算等手段进行炸药的推送,降低操作人员的工作难度;
17、2.本发明,设置旋转组件,在定位完成后,螺杆通过安装座带动清理盘上的清理板离开孔洞,此过程中,可以带动清理盘和清理板转动,通过清理板对孔洞内壁进行清理,配合清理板的独特设计,还可以将清理下来的碎石逐步导出孔洞,为炸药的推入提供稳定的环境,进一步的,在通过清理板进行持续定位和清理的过程中,通过推送组件,可以同步将炸药稳定的推入孔洞内,配合前序的伸缩连接组件,使得螺杆只需要输入一个稳定的行程即可完成炸药的推入,操作简单。
技术特征:1.一种爆破机器人,包括行走基座(1),所述行走基座(1)上安装有工控机(2)和自动控制模块(3),所述自动控制模块(3)包括远程遥控模块和视觉检测模块,所述远程遥控模块用于接受远程遥控命令,所述视觉检测模块用于传递机器视觉;
2.根据权利要求1所述的一种爆破机器人,其特征在于:所述缓冲组件(6)包括第一弹性伸缩杆(61),所述第一弹性伸缩杆(61)万向转动安装在安装盘(5)的外侧中心处,且第一弹性伸缩杆(61)的外端固定有安装球(62),并且安装球(62)嵌入式设置在装配盘(7)的内侧中心处,所述装配盘(7)和安装盘(5)之间固定有第一弹簧(63)。
3.根据权利要求2所述的一种爆破机器人,其特征在于:所述第一弹簧(63)在装配盘(7)上等角度分布,且第一弹簧(63)呈倾斜设置。
4.根据权利要求3所述的一种爆破机器人,其特征在于:所述伸缩连接组件(10)包括伸缩油箱(101),所述伸缩油箱(101)固定在安装座(9)的外侧,且伸缩油箱(101)内通过第二弹簧(102)连接有伸缩头(103),并且伸缩头(103)的一端在清理盘(11)内侧空腔内嵌入式活动安装。
5.根据权利要求4所述的一种爆破机器人,其特征在于:所述伸缩头(103)的一端设计为球形在清理盘(11)内侧环状空腔内贴合滑动,且伸缩头(103)在安装座(9)上等角度分布。
6.根据权利要求4所述的一种爆破机器人,其特征在于:所述清理板(15)设计为弧形结构,且清理板(15)的内侧设计为钩形结构,并且清理板(15)在清理盘(11)上等角度分布。
7.根据权利要求6所述的一种爆破机器人,其特征在于:所述定位板(16)通过第三弹簧(17)在安装座(9)内弹性转动,且定位板(16)初始状态倾斜设置。
8.根据权利要求7所述的一种爆破机器人,其特征在于:所述旋转组件(18)包括齿辊(181),所述齿辊(181)嵌入式转动安装在安装座(9)顶部的内部,且齿辊(181)的外端啮合设置有齿环(182),并且齿环(182)固定在清理盘(11)的内侧,所述齿辊(181)的内端空腔内伸入设置有导柱(183),且导柱(183)固定在装配盘(7)的外侧,所述导柱(183)凸起位置处位于导槽(184)内,且导槽(184)开设在齿辊(181)内端空腔侧壁上。
9.根据权利要求8所述的一种爆破机器人,其特征在于:所述导柱(183)凸起位置在导槽(184)内贴合滑动,且导槽(184)设计为螺旋状结构。
10.根据权利要求9所述的一种爆破机器人,其特征在于:所述推送组件(19)包括油液箱一(191),所述油液箱一(191)固定在装配盘(7)的外侧中心处,且油液箱一(191)内设置有活塞杆一(192),所述活塞杆一(192)伸出油液箱一(191)的一端固定有油液箱二(193),且油液箱二(193)内安装有活塞杆二(194),所述活塞杆二(194)伸出油液箱二(193)的一端固定有机械爪(195),所述装配盘(7)的外侧固定有油液箱三(197),且油液箱三(197)内安装有活塞杆三(198),并且活塞杆三(198)的一端固定在安装座(9)的内侧,所述油液箱三(197)与油液箱一(191)通过管路相通,所述油液箱二(193)通过软管与伸缩油箱(101)相通。
技术总结本发明公开了一种爆破机器人,包括行走基座,所述行走基座上安装有工控机和自动控制模块,所述自动控制模块包括远程遥控模块和视觉检测模块,所述远程遥控模块用于接受远程遥控命令,所述视觉检测模块用于传递机器视觉;所述多轴机械手固定在行走基座上,且多轴机械手上固定有安装盘,并且安装盘上通过缓冲组件连接有装配盘,所述装配盘的底部通过电机连接有螺杆,所述安装座的外侧通过伸缩连接组件连接有清理盘,所述清理盘外侧空腔内通过第二弹性伸缩杆连接有安装杆,所述安装杆的外侧固定有清理板,所述安装座的中部空心处的内壁上转动安装有定位板。该爆破机器人,具备减震和自动定位功能,同时对孔洞内部进行清理。技术研发人员:乔锐,李振宇,徐向新,孔源,郝玉雄受保护的技术使用者:鄂尔多斯市立安爆破工程有限责任公司技术研发日:技术公布日:2024/7/11本文地址:https://www.jishuxx.com/zhuanli/20240801/239673.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表