一种激光引信目标方位快速识别方法
- 国知局
- 2024-08-02 12:25:43
本发明属于水下激光探测领域,具体涉及一种激光引信目标方位快速识别方法。
背景技术:
1、水中兵器战斗部采用定向起爆技术时,会明显改变水下爆炸流场的特性并在起爆方向范围内产生较大的高压区,可有效提升水中战斗部的毁伤能力。配合定向战斗部使用的激光近炸引信需具备全周向探测目标距离和方位的能力。
2、现有的激光探测方位识别系统可根据激光器布局方式分为周向多通道布局和单光束扫描方式两种。其中,周向多通道布局方式常用的有4通道、6通道、8通道等。这种布局方式一般通过多个面激光扫描器周向布置来实现目标方位探测,方位角检测精度均低于10°,无法实现高精度测量。
3、传统水下单光束扫描方式采用的方位识别方法为在扫描的电机轴上安装小型永磁体,利用永磁体在周围的空间产生变化的磁场,根据磁信号来解算电机轴的旋转角度,从而识别目标方位(谭亚运.水下脉冲激光近程周向扫描探测技术研究[d].南京理工大学,2018)。由于该方法的目标方位以计数器计时结果的形式输出,需要采用复杂的解算程序才能将计时结果转化为角度值,因此无法对目标信号进行实时处理。近年来,单光束扫描探测的方位识别方法有了新的进展。彭展提出了一种基于多普勒效应的激光方位识别技术,该技术主要是利用光源移动会造成源前光波的压缩和源后光波的拉伸这一效应,通过激光频率的不断变化来解算方位信息(彭晨.基于多普勒效应的卫星激光告警方位识别技术[j].航天电子对抗,2019,35(03):46-49.)。但该技术存在解算方式复杂、所需扫描频率很高等特点,同时仅适用于高重频脉冲激光器,且目标与探测器之间需要保证相对速度较大。薛连杰等设计了一种用于移动机器人上的探测系统,基于激光点云技术进行方位估计(薛连杰,张彪,张霄远等.移动机器人基于激光点云定位建图的汽车宽度与方位估计[j].机械与电子,2018,36(06):76-80.),但由于引信的体积限制和可搭载的激光器功率限制,该系统无法应用于水下引信中。张伟等深入分析了基于数据挖掘技术的单光束脉冲激光方位识别方法,该方法的主要原理是利用单光束脉冲激光束的阵列分布,采用线性参数估计进行光束脉冲激光信号检测和特征提取,从而解算出目标方位(张伟,李忠,袁四化等.数据挖掘的单光束脉冲激光方位识别精度分析[j].激光杂志,2022,43(08):180-184.)。该方法具有识别精度高、获得结果清晰等特点,但所需激光器功率高,且缺乏对于被物体反射后的激光信号特征变化等参数信息的研究。因此,找到一种能应用于水下引信的精度高且识别速度快的目标识别方法具有重要意义。
技术实现思路
1、本发明的目的在于提供一种激光引信目标方位快速识别方法,设计了一种新型的磁电检测模块,可实现对椎体式反射镜棱边的准确识别,有效提高对目标方位的识别精度;设计了基于分频时钟采样的目标方位快速编码识别系统,可有效提升对目标的识别速度;针对大体积目标设计了新的起爆策略,通过测量视场角内的目标初始方位编码和终止方位编码,可实现目标易损部位的识别;通过有限状态机对每两个相邻霍尔开关信号之间的时间间隔进行计时和校正,可有效减少电机的转速波动误差;实现了激光引信对目标方位的快速识别,同时初步具备了对目标易损部位的识别能力,可在不增加硬件成本的基础上有效提升引信的毁伤效能。
2、实现本发明目的的技术解决方案为:一种激光引信目标方位快速识别方法,步骤如下:
3、步骤1、利用四象限脉冲激光扫描器进行水下周向扫描探测,获取激光回波信息和霍尔开关信号。
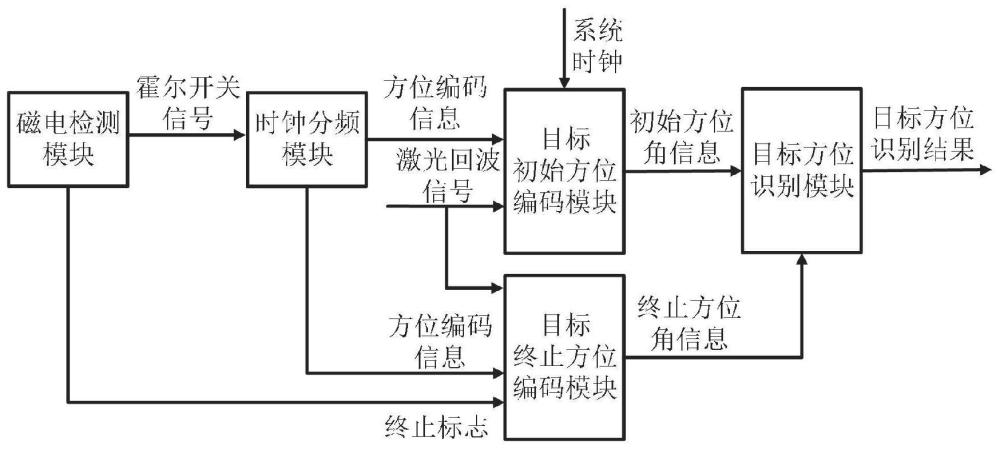
4、步骤2、利用霍尔开关信号,设计基于分频时钟采样的目标方位快速编码方案,对激光回波信号进行编码,得到目标初始方位角d0和终止方位角d1。
5、步骤3、根据目标初始方位角d0和终止方位角d1,判断目标大小并选取合适的起爆方式。
6、步骤4、针对大目标易损部位设计起爆策略:
7、通常认为目标的几何中心为其易损部位,因此结合目标初始方位角信息d0和目标终止方位角信息d1,四象限脉冲激光扫描单元得到在视场角范围内唯一的方位识别结果d为:
8、
9、本发明与现有技术相比,其显著优点在于:
10、(1)本发明采用磁电检测模块,可实现对椎体式反射镜棱边的准确识别,解决了传统方法无法准确区分椎体式反射镜棱边的问题,有效提高了对目标方位的识别精度。
11、(2)本发明采用基于分频时钟采样的目标方位快速编码方案,能实现在扫描结束后立即得到目标方位识别结果,输出延迟仅为20ns,可有效提升目标的识别速度。
12、(3)本发明针对大体积目标的薄弱部位设计了新的起爆策略,初步实现了目标易损部位的识别,能有效提升定向战斗部的毁伤效能。
13、(4)本发明采用有限状态机对每两个相邻霍尔开关信号之间的时间间隔进行计时和校正,电机每旋转一周可以对分频时钟完成两次校正,与传统方法相比可将电机的转速波动误差减少一半。
技术特征:1.一种激光引信目标方位快速识别方法,其特征在于,步骤如下:
2.根据权利要求1所述的激光引信目标方位快速识别方法,其特征在于,步骤1中,四象限脉冲激光扫描器包含四个象限探测窗口,每个象限探测窗口中设有一个四象限脉冲激光扫描单元,顺时针依次编号为第一象限、第二象限、第三象限、第四象限;为了保持足够的激光发射功率,每次仅保持两个相对象限的窗口发射激光,如此交替工作实现激光的360°全周向扫描。
3.根据权利要求2所述的激光引信目标方位快速识别方法,其特征在于,四象限脉冲激光扫描单元由基于椎体式扫描的脉冲激光引信扫描单元改进而来,每个四象限脉冲激光扫描单元的透光窗口尺寸大小为45mm,将基于椎体式扫描的脉冲激光引信扫描单元中的电磁方位检测模块替换为磁电检测模块,其中磁电检测模块包括霍尔开关(2)和磁环(3);
4.根据权利要求3所述的激光引信目标方位快速识别方法,其特征在于,磁电感应模块中的磁环(3)由三个120°均匀分布的弧形磁极构成,相邻两个磁极的交接面对准反射镜底面轮廓边的中点;电机(1)旋转时带动磁环(3)和椎体式反射镜(4)转动,只有当磁环(3)的相邻两个磁极交界面正对霍尔开关(2)时,磁环(3)产生的磁场才会使霍尔开关(2)产生一个霍尔开关信号。
5.根据权利要求4所述的激光引信目标方位快速识别方法,其特征在于,四象限脉冲激光扫描单元每收到一个霍尔开关信号则代表扫描激光在视场角范围内完成了一次扫描;为了磁电检测模块的正常工作,磁环(3)相邻两个磁极交界面正对霍尔开关(2)时在霍尔开关(2)周围产生的磁场的磁通密度b应不小于霍尔开关(2)产生信号需要的最低磁通密度。
6.根据权利要求1所述的激光引信目标方位快速识别方法,其特征在于,步骤2中,利用霍尔开关信号,设计基于分频时钟采样的目标方位快速编码方案,对激光回波信号进行编码,得到目标初始方位角d0和终止方位角d1,具体如下:
7.根据权利要求6所述的激光引信目标方位快速识别方法,其特征在于,步骤2中,采用有限状态机对相邻两个霍尔开关信号之间的时间间隔δtme进行计时和校正,具体如下:
8.根据权利要求7所述的激光引信目标方位快速识别方法,其特征在于,目标终止方位编码寄存器在每个激光回波信号的驱动下实时更新,但只有本次扫描结束,即当探测结束标志到来时才将结果锁存,将目标终止方位角信息记为d1。
9.根据权利要求8所述的激光引信目标方位快速识别方法,其特征在于,采用有限状态机进行校正和计时,电机每旋转一周对分频时钟完成两次校正。
10.根据权利要求9所述的激光引信目标方位快速识别方法,其特征在于,步骤3中,根据目标初始方位角d0和终止方位角d1,判断目标大小并选取合适的起爆方式,具体如下:
技术总结本发明公开了一种适用于椎体式扫描激光引信的目标方位快速识别方法,通过设计一种磁电检测模块,可实现对椎体式反射镜棱边的准确识别,有效提高了对目标方位的识别精度;设计了基于分频时钟采样的目标方位快速编码识别方案,可有效提升目标的识别速度;针对大体积目标设计了新的起爆策略,通过测量视场角内的目标初始方位编码和终止方位编码实现目标易损部位的识别;通过有限状态机对每两个相邻霍尔开关信号之间的时间间隔进行计时和校正,可将电机的转速波动误差减少一半。本发明实现了激光引信对目标方位的快速识别,同时初步具备了对目标易损部位的识别能力,可在不增加硬件成本的基础上有效提升引信的毁伤效能。技术研发人员:查冰婷,陈琢,徐光博,郑震,张合,黄鑫龙,孙浩然受保护的技术使用者:南京理工大学技术研发日:技术公布日:2024/6/11本文地址:https://www.jishuxx.com/zhuanli/20240802/236021.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表