无人机自组网方法、系统及输电线路巡检方法与流程
- 国知局
- 2024-08-02 12:43:29
本发明属于电气自动化领域,具体涉及一种无人机自组网方法、系统及输电线路巡检方法。
背景技术:
1、随着经济技术的发展和人们生活水平的提高,电能已经成为了人们生产和生活中必不可少的二次能源,给人们的生产和生活带来了无尽的便利。因此,保障电能的稳定可靠供应,就成为了电力系统最重要的任务之一。
2、随着无人机技术的快速发展和普及,无人机在架空输电线路巡检中的应用已经较为广泛,利用无人机搭载检测设备巡视架空输电设备的技术逐渐成熟,极大地提高了架空输电线路巡视的效率和质量。然而,高原山区输电线路的架设位置常常位于崇山峻岭之上,交通基础设施较差,远程引导控制难以实现,加之大山的遮蔽,无人机的通信距离受到很大影响。
3、当前,针对输电线路无(弱)信号区域实时数据传输效率低的问题,通常会使用智能车载无人机移动作业系统进行巡检,移动作业平台以车为载体,内置无人机电控设备柜和人工操作台,可以实现无人机的精准降落、自主飞行、充电、远距离数据传输等功能。依靠车载无人机移动作业系统,无人机可灵活前往无(弱)信号区域进行巡检,有效提高了无人机的巡检范围和效率。然而,车载无人机移动作业系统受限于车辆道路,高原山区输电线路的架设位置常常位于崇山峻岭之上,交通基础设施较差,这些巡检区域常常存在树木、山地等高大障碍物,车载无人机移动作业系统无法灵活移动。此外,高大障碍物形成的无线电屏蔽可能会造成无人机信号丢失,无法实现远距离传输。这些使得车载无人机移动作业系统巡检范围受到限制。
技术实现思路
1、本发明的目的之一在于提供一种可靠性高、实用性好且效率较高的无人机自组网方法。
2、本发明的目的之二在于提供一种实现所述无人机自组网方法的系统。
3、本发明的目的之三在于提供一种包括了所述无人机自组网方法的输电线路巡检方法。
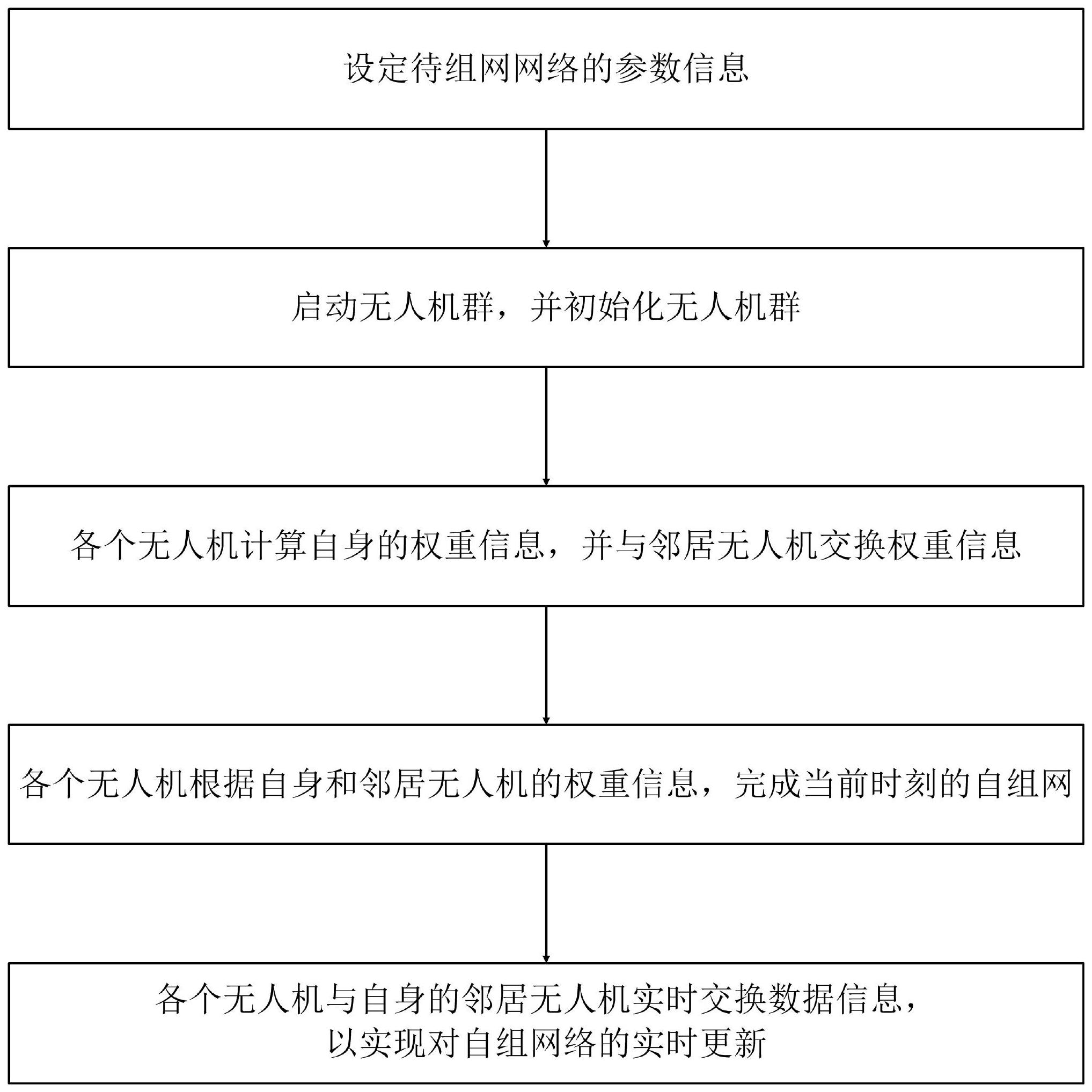
4、本发明提供的这种无人机自组网方法,包括如下步骤:
5、s1.设定待组网网络的参数信息;
6、s2.启动无人机群,并初始化无人机群;
7、s3.各个无人机计算自身的权重信息,并与邻居无人机交换权重信息;
8、s4.各个无人机根据自身和邻居无人机的权重信息,完成当前时刻的自组网;
9、s5.各个无人机与自身的邻居无人机实时交换数据信息,以实现对自组网络的实时更新。
10、步骤s1所述的设定待组网网络的参数信息,具体包括如下步骤:
11、设定待组网网络为分布式架构,控制站作为网络顶端的控制层,网络节点分为关键节点和普通节点,关键节点用于普通节点和控制站之间的中继通讯。
12、步骤s2所述的初始化无人机群,具体包括如下步骤:
13、初始化无人机群后,各个无人机按照设定的周期,周期性对外广播消息,用于发现自身的邻居无人机并交互当前自身的状态信息,并根据交互的信息建立邻居表。
14、步骤s3所述的各个无人机计算自身的权重信息,具体包括如下步骤:
15、采用如下算式计算得到权重信息wi:
16、wi=w1×ei-w2×di-w3×li
17、式中wi为第i个无人机的权重信息;ei为第i个无人机的剩余能量因子,用于表示第i个无人机的剩余电池能量;di为第i个无人机的节点度因子,用于表示第i个无人机的邻居无人机数量与理想节点数量之间的接近程度,且di=di-dideal,di为第i个无人机的邻居无人机数量,dideal为预先设定的理想节点度;li为第i个无人机的位置因子,用于表示第i个无人机到控制站的距离;w1为能量因子权重,w2为节点度因子权重,w3为位置因子权重,且w1+w2+w3=1。
18、步骤s4所述的各个无人机根据自身和邻居无人机的权重信息,完成当前时刻的自组网,具体包括如下步骤:
19、各个无人机获取邻居无人机的权重信息;
20、各个无人机将自身的邻居无人机的权重信息与自身的权重信息进行比较和判断:
21、若自身的权重信息最大,则确定自身为关键节点,并对邻居无人机发送告知信息;
22、若自身的权重信息不是最大,则选择自身为普通节点,并等待关键节点发送的告知信息;
23、将关键节点对应的无人机设定为中继无人机并定义对应的子网络,将普通节点对应的无人机设定为普通无人机;
24、计算各个普通无人机与各个中继无人机的距离,将普通无人机划分至距离其自身距离最近的中继无人机所对应的子网络,从而完成当前时刻的自组网;
25、在同一个子网络内,中继无人机为普通无人机分配相应的通信资源并管理普通无人机。
26、所述的距离,具体为采用如下算式计算得到:
27、
28、式中distij为第i个无人机和第j个无人机之间的距离;xj为第j个无人机的纬度;xi为第i个无人机的纬度;yj为第j个无人机的经度;yi为第i个无人机的经度;hj为第j个无人机的高度;hi为第i个无人机的高度。
29、各个无人机实时进行如下步骤:
30、在同一个子网络内,各个普通无人机保证自身的速度等于设定的速度阈值;
31、在同一个子网络内,保证任意两个无人机之间的距离,小于设定的最大安全阈值;
32、在同一个子网络内,保证任意两个无人机之间的距离,大于设定的最小安全阈值;
33、在同一个子网络内,保证中继无人机下属的普通无人机的数量,小于设定的数量阈值;
34、在一个周期内,中继无人机广播消息后,若在设定时间内没有收到下属的普通无人机的回复消息,则中继无人机认定对应的普通无人机离开了中继无人机所在的子网络;
35、若普通无人机在设定时间内没有收到中继无人机下发的广播信息,则普通无人机判定中继无人机离开了普通无人机所在的子网络;此时,普通无人机根据自身和邻居无人机的权重信息,完成当前时刻的自身的组网;
36、若中继无人机判定自身的能量无法满足子网络运行要求时,中继无人机启动中继切换机制,等待备用的中继无人机接管子网络;
37、若中继无人机掉线,备用的中继无人机未在设定时间内收到中继无人机广播的消息,则备用的中继无人机向中继无人机发送消息;若备用的中继无人机继续无法在设定时间内收到中继无人机回复的消息,则备用的中继无人机接管子网络。
38、本发明还提供了一种实现所述无人机自组网方法的系统,包括数据获取模块、初始化模块、权重计算模块、初步自组网模块和实时自组网模块;数据获取模块、初始化模块、权重计算模块、初步自组网模块和实时自组网模块依次串联;数据获取模块用于设定待组网网络的参数信息,并将数据信息上传初始化模块;初始化模块用于根据接收到的数据信息,启动无人机群,并初始化无人机群,并将数据信息上传权重计算模块;权重计算模块用于根据接收到的数据信息,各个无人机计算自身的权重信息,并与邻居无人机交换权重信息,并将数据信息上传初步自组网模块;初步自组网模块用于根据接收到的数据信息,各个无人机根据自身和邻居无人机的权重信息,完成当前时刻的自组网,并将数据信息上传实时自组网模块;实时自组网模块用于根据接收到的数据信息,各个无人机与自身的邻居无人机实时交换数据信息,以实现对自组网络的实时更新。
39、本发明还提供了一种包括了所述无人机自组网方法的输电线路巡检方法,包括如下步骤:
40、a.在边缘计算平台搭建输电线路故障检测模型;
41、b.采用所述的无人机自组网方法,对输电线路巡检无人机进行自组网;
42、c.组网完成后,将普通无人机作为巡线无人机,对输电线路进行巡检,并将巡线数据通过中继无人机传输至控制站;
43、d.控制站将数据传递至边缘计算平台,边缘计算平台采用搭建的输电线路故障检测模型对接收到的数据进行处理,完成输电线路的巡检。
44、本发明提供的这种无人机自组网方法、系统及输电线路巡检方法,通过网络自组网的方案,不仅实现了无人机的自组网,还可以通过该自组网实现输电线路的巡检,而且可靠性更高,实用性更好,效率更高。
本文地址:https://www.jishuxx.com/zhuanli/20240802/237541.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。