交通环境干扰大数据鉴定系统的制作方法
- 国知局
- 2024-08-05 11:40:31
本发明涉及交通管理领域,尤其涉及一种交通环境干扰大数据鉴定系统。
背景技术:
1、交通管理指的是,按照交通法规的要求、规定和道路交通的实际状况,运用教育、技术等手段合理地限制和科学地组织、指挥交通,正确处理道路交通中人、车、道之间的关系,使交通尽可能安全、通畅、公害小和能耗少。
2、交通管理的目的在于认识并遵循道路交通流所固有的客观规律,运用现代化的技术手段和科学的原则、方法、措施,不断地提高交通管理的效率和质量,以求得延误更少,运行时间更短,通行能力更大,秩序更好和运行费用更低,从而获得最好的社会经济、交通与环境效益。
3、当前,由于无人机在各个国家或者地区的频繁使用,尤其是民用无人机,对于一些拍摄场景中存在交通环境的民用无人机,容易出现无人机碰撞到正常交通行驶的车辆的事故,不仅仅对无人机的机体造成损伤,而且会对正常交通行驶的车辆造成毁坏。
技术实现思路
1、为了解决上述问题,本发明提供了一种交通环境干扰大数据鉴定系统,能够引用景深分析机构用于在图像分块被确认为存在车辆的图像分块时,基于所述图像分块的整体景深确定所述图像分块对应的车辆到交通监测器件的成像镜头的当前距离,并在所述当前距离小于等于设定距离限量时,发出交通干扰信号,从而避免地面交通环境被过近无人机干扰和阻碍。
2、根据本发明,提供了一种交通环境干扰大数据鉴定系统,所述系统包括:
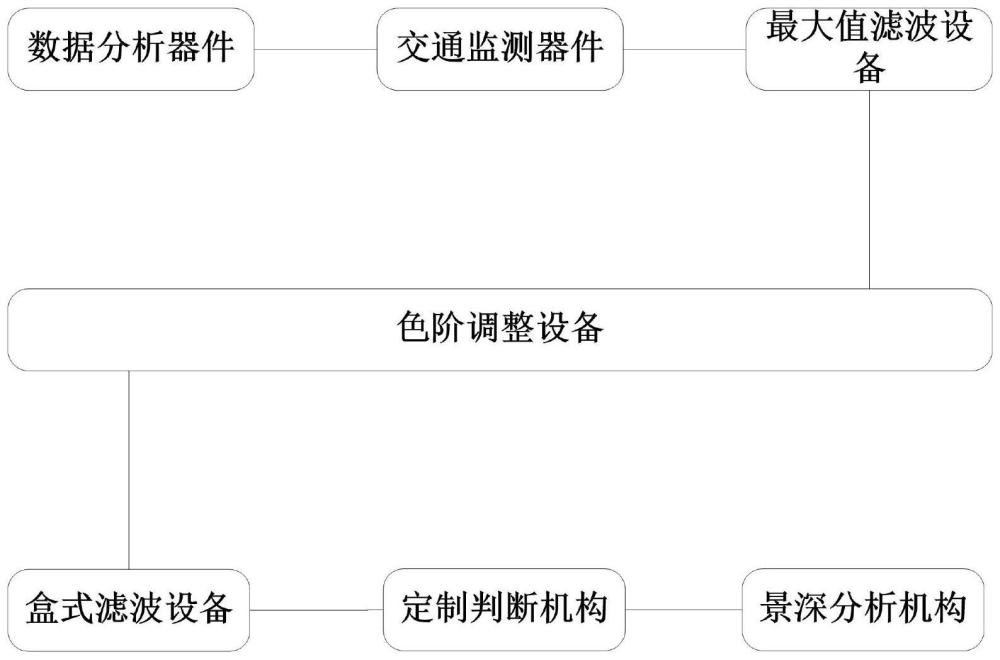
3、数据分析器件,设置在无人机内,用于在所述无人机当前飞行在某一条高速公路的正上方空域时,触发对所述无人机底部的交通监测器件的现场拍摄操作;
4、交通监测器件,用于在所述数据分析器件的触发下执行对所述无人机下方的交通环境的视觉监测处理,以获得并输出对应的交通监测图像;
5、最大值滤波设备,设置在无人机内且与所述交通监测器件连接,用于对接收到的交通监测图像执行最大值滤波处理,以获得并输出相应的最大值滤波图像;
6、色阶调整设备,与所述最大值滤波设备连接,用于对接收到的最大值滤波图像执行多次色彩指数提升处理,以获得并输出相应的色阶调整图像;
7、盒式滤波设备,与所述色阶调整设备连接,用于对接收到的色阶调整图像执行盒式滤波处理,以获得并输出相应的盒式滤波图像;
8、定制判断机构,设置在无人机内且与所述盒式滤波设备连接,用于基于车辆对应的颜色成像特征初次确认接收到的盒式滤波图像中的车辆所在的图像分块,其中,车辆对应的颜色成像特征为车辆对应的lab颜色空间下的红绿分量数值区间、黑白分量数值区间和黄蓝分量数值区间,所述定制判断机构还用于解析所述图像分块的几何形状对应的多个几何参数,根据所述多个几何参数以及所述盒式滤波图像的水平分辨率和垂直分辨率采用ai智能模型智能判断所述图像分块是否被确认为存在车辆的图像分块,其中,所述图像分块的几何形状对应的多个几何参数包括所述图像分块的几何形状对应的圆度、凸凹度、长径比和紧密度,以及所述盒式滤波图像的水平分辨率和垂直分辨率分别为所述盒式滤波图像中像素列的数量以及像素行的数量,以及所述ai智能模型为完成固定数量的多次训练后的深度卷积网络;
9、景深分析机构,与所述定制判断机构连接,用于在所述图像分块被确认为存在车辆的图像分块时,基于所述图像分块的整体景深确定所述图像分块对应的车辆到所述交通监测器件的成像镜头的当前距离,并在所述当前距离小于等于设定距离限量时,发出交通干扰信号;
10、其中,基于所述图像分块的整体景深确定所述图像分块对应的车辆到所述交通监测器件的成像镜头的当前距离,并在所述当前距离小于等于设定距离限量时,发出交通干扰信号包括:确定的所述图像分块对应的车辆到所述交通监测器件的成像镜头的当前距离与所述图像分块的整体景深正向关联。
11、因此,本发明具备了以下四处突出的技术效果:
12、首先:基于车辆对应的颜色成像特征初次确认接收到的盒式滤波图像中的车辆所在的图像分块,其中,车辆对应的颜色成像特征为车辆对应的lab颜色空间下的红绿分量数值区间、黑白分量数值区间和黄蓝分量数值区间;
13、其次:解析图像分块的几何形状对应的多个几何参数,将所述多个几何参数以及所述盒式滤波图像的水平分辨率和垂直分辨率智能判断所述图像分块是否被确认为存在车辆的图像分块;
14、再次:引用景深分析机构用于在图像分块被确认为存在车辆的图像分块时,基于所述图像分块的整体景深确定所述图像分块对应的车辆到所述交通监测器件的成像镜头的当前距离,并在所述当前距离小于等于设定距离限量时,发出交通干扰信号,从而避免地面交通环境被过近无人机干扰和阻碍;
15、最后:确定的图像分块对应的车辆到交通监测器件的成像镜头的当前距离与图像分块的整体景深正向关联。
16、本发明的交通环境干扰大数据鉴定系统结构紧凑、操作可控。由于能够引用景深分析机制和视觉分析机制对车辆是否到无人机拍摄的成像镜头过近进行针对性分析,从而避免地面交通环境被过近无人机干扰和阻碍。
技术特征:1.一种交通环境干扰大数据鉴定系统,其特征在于,所述系统包括:
2.如权利要求1所述的交通环境干扰大数据鉴定系统,其特征在于:
3.如权利要求2所述的交通环境干扰大数据鉴定系统,其特征在于,所述系统还包括:
4.如权利要求2所述的交通环境干扰大数据鉴定系统,其特征在于,所述系统还包括:
5.如权利要求2-4任一所述的交通环境干扰大数据鉴定系统,其特征在于:
6.如权利要求5所述的交通环境干扰大数据鉴定系统,其特征在于:
7.如权利要求5所述的交通环境干扰大数据鉴定系统,其特征在于:
8.如权利要求5所述的交通环境干扰大数据鉴定系统,其特征在于:
9.如权利要求5所述的交通环境干扰大数据鉴定系统,其特征在于:
技术总结本发明涉及一种交通环境干扰大数据鉴定系统,包括:数据分析器件,用于在无人机当前飞行在某一条高速公路的正上方空域时,触发拍摄操作;定制判断机构,用于采用AI智能模型智能判断图像分块是否被确认为存在车辆的图像分块;景深分析机构,用于在图像分块被确认为存在车辆的图像分块时,基于图像分块的整体景深确定图像分块对应的车辆到交通监测器件的成像镜头的当前距离,并在当前距离小于等于设定距离限量时,发出交通干扰信号。本发明的交通环境干扰大数据鉴定系统结构紧凑、操作可控。由于能够引用景深分析机制和视觉分析机制对车辆是否到无人机拍摄的成像镜头过近进行针对性分析,从而避免地面交通环境被过近无人机干扰和阻碍。技术研发人员:刘青畅,张云哲,何立,许源,孙友亮受保护的技术使用者:南京畅帧叶科技有限公司技术研发日:技术公布日:2024/8/1本文地址:https://www.jishuxx.com/zhuanli/20240802/258755.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。