一种洗涤设备及其浊度检测方法与流程
- 国知局
- 2024-08-05 11:53:50
本发明属于机械设备领域,具体地说,涉及一种洗涤设备及其浊度检测方法。
背景技术:
1、洗涤设备主要指可以用水对衣物进行清洗的设备,如洗衣机、洗烘一体机等。
2、洗涤设备具有容纳洗涤水和衣物的筒体,衣物在筒体中完成浸泡、洗涤、脱水和烘干等多种操作,衣物的污垢在筒体中分解和脱落,溶解或混合进洗涤水中,并经排水管路排出,实现污垢和衣物的分离。在这一过程中,洗涤水中的污垢也可能会附着或沉积在筒体内,造成筒体和筒体内的部件脏污,在下一次洗涤中,筒体和筒体内部件上附着和沉积的部分污垢会再次混合或溶解进洗涤水中,所以洗涤水的污浊程度是反映衣物脏污程度、筒体及筒体部件脏污程度的重要指标,
3、目前,洗涤设备普遍安装浊度传感器,用以监测洗涤水的污浊程度,并以浊度传感器的读数和读数变化,来判定衣物是否洗净和内筒是否脏污。
4、浊度传感器一般采用光学原理,具有光线发射端和接收端,光线从发射端发出,穿过洗涤水时,洗涤水中的污浊物质会使光线散射,通过对接收端光线强度等参数的测定,可以通过计算得出洗涤水的浑浊程度。
5、在现有技术中,浊度传感器安装在洗涤设备的筒体底部,但是如前述所说,溶解和混合在洗涤水中的污垢也会附着和沉积在浊度传感器表面,遮挡光线发射端和接收端,影响浊度传感器读数的准确,使浊度传感器检测不准。
6、有鉴于此,特提出本发明。
技术实现思路
1、本发明旨在提出一种洗涤设备及其控制方法,目的在于解决洗涤设备中的浊度传感器容易脏污、影响测量精度的问题。
2、为解决上述技术问题,本发明采用技术方案的基本构思是:
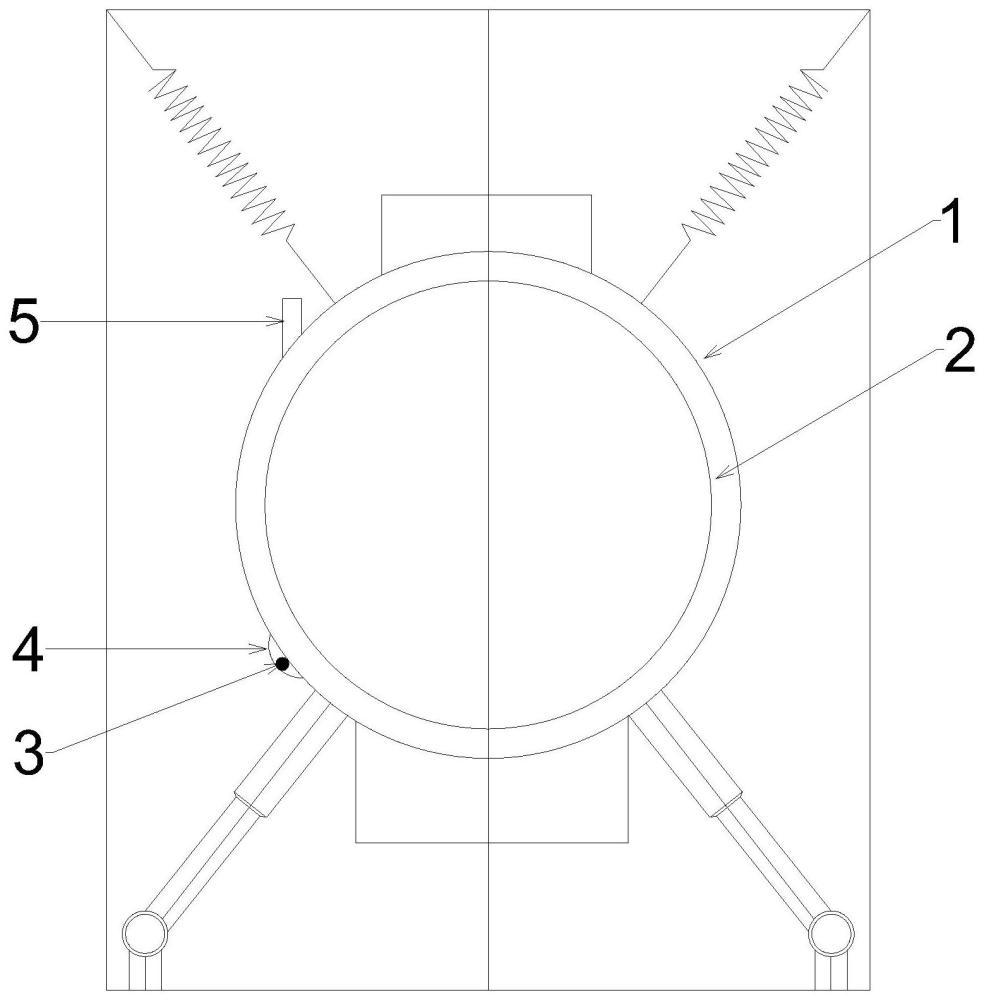
3、一种洗涤设备,包括用于容纳洗涤水的筒体和设置在筒体内的浊度传感器,浊度传感器设置在筒体的内周侧壁上,且位于筒体的水位线以上。
4、进一步地,所述筒体上开设有用于向筒体内进水的进水口,进水口朝向浊度传感器设置,用于向浊度传感器侧进水;
5、优选的,所述进水口设置在浊度传感器上方。
6、进一步地,所述筒体内周侧壁上设置有向筒体外部凹陷的敞口容纳腔,所述浊度传感器设置在所述容纳腔内;
7、优选的,所述浊度传感器设置在容纳腔的敞口端。
8、进一步地,所述容纳腔的敞口上设置有对敞口形成部分遮挡的挡板,所述浊度传感器避让所述挡板设置在容纳腔的敞口端。
9、一种如上述任一洗涤设备的浊度检测方法,所述筒体包括用于容纳洗涤水的外筒和设置在外筒内的内筒,浊度传感器对洗涤水进行浊度检测时,控制所述内筒转动。
10、进一步地,控制内筒转动包括:洗涤过程中,若控制浊度传感器对洗涤水进行浊度检测,则控制内筒加速转动。
11、进一步地,预设水量值v0,获取当前筒体内的实际水量v,比较预设水量值v0和获取的水量v的大小,若v<v0,则在进行浊度检测时控制内筒加速转动;
12、优选的,内筒转速的增加量与洗涤水的水量成负相关关系。
13、进一步地,预设浊度值nmax,获取当前筒体内洗涤水的浊度值n,比较预设浊度值nmax和获取的浊度值n的大小,若n≥nmax,则在洗涤结束后控制洗涤设备的进水口进水。
14、进一步地,预设浊度值n0,获取浊度传感器读数n,比较预设浊度值n0与浊度传感器读数n的大小,若n≥n0,则判定该读数为有效读数。
15、进一步地,控制内筒转动包括控制内筒做正、反交替转动,预设延迟时间t0,
16、自改变转动方向起t0时间后,控制读取浊度传感器读数,获得相邻的两次读数n1和n2,比较n1和n2的大小,取较大的读数为有效读数。
17、采用上述技术方案后,本发明与现有技术相比具有以下有益效果。
18、1.洗涤水在浸泡和洗涤时,会溶解和混合进大量的污浊物,这些污浊物可能会附着于接触洗涤水的物体表面,浊度传感器的表面相对光滑的筒体内壁更加复杂,更容易吸附污浊物。在排水阶段,不溶于水的污浊物会沉淀在筒体底部,筒体底部残留水中的污浊物也会在残留水蒸发后析出,沉积在筒体底部,从而在筒体底部形成大量污垢。
19、现有的洗涤设备中,浊度传感器设置在筒体底部,极易在较短时间内沉积大量污垢,浊度传感器一般采用光学原理测定浊度,发射的光线难以穿透污垢,使浊度传感器检测失灵。
20、浊度传感器设置在水位线以上,不与洗涤水持续接触,避免了洗涤和浸泡、排水等过程中污浊物的吸附,更避免了排水阶段的污垢沉积,使浊度传感器能够在较长时间内维持洁净,从而保证检测灵敏度和准确性。
21、2.进水口朝向浊度传感器设置,在每次洗涤设备进水时,从进水口流入筒体的清洁水都会直接冲击到浊度传感器上,完成对浊度传感器的清洗,即使浊度传感器在某一次清洗中出现了脏污吸附的情况,也可以在下次工作前完成清洁。因为进水口进水是每次洗涤前的必要程序,相当于每次使用洗涤设备前都对浊度传感器进行了一次清洗,保持了浊度传感器的持续清洁,且无需专门操作,方便了用户。
22、3.浊度传感器通过测定光线发射端和接收端之间的洗涤水,进而对筒体中洗涤水的污浊程度进行推定,浊度传感器位置高于水位线,只有在洗衣机内筒转动,搅动洗涤水的时候,洗涤水才会短暂的没过浊度传感器,但是这个时间比较短暂,且流过光线发射端和接收端之间的洗涤水的水量有限,不利于检测。
23、在筒体内周侧壁上设置向筒体外部凹陷的容纳腔,洗涤水在内筒转动的作用下跟随内筒运动时,会有部分洗涤水位置升高,流入容纳腔中,在洗涤水回落时,进入容纳腔中的这部分洗涤水会随之从容纳腔中流出。浊度传感器设置在容纳腔内,进出容纳腔的洗涤水均需从浊度传感器的光线发射端和接收端之间经过,增加了光线发射端和接收端之间的过水量,有利于浊度传感器完成检测。
24、4.洗涤水在凹陷于筒体内周侧壁的容纳腔中进出,因为缺少阻挡,所以洗涤水在容纳腔中流出的速度很快,对提升浊度传感器的测量时间帮助有限。
25、在容纳腔的敞口部分设置挡板后,挡板和容纳腔形成了半封闭式、可暂时存水的腔体,洗涤水进入腔体后,因为开口相对整个容纳腔是较小的,腔内的洗涤水流出时,受限于容纳腔开口的大小,需要一定的时间才能完全流出,进一步延长了浊度传感器对洗涤水的检测时间,有利于浊度传感器完成检测。
26、5.浊度传感器位置高于水位线,在静止时,浊度传感器无法接触到洗涤水,也就无法检测洗涤水,控制内筒转动,搅动洗涤水,洗涤水在跟随内筒运动时,洗涤水会暂时升高,没过浊度传感器,从而完成对洗涤水浊度的检测。
27、6.内筒在执行正常的洗涤工序时,内筒转动,会带动外筒中的洗涤水运动,使外筒中的洗涤水在部分时间中位置升高。如果浊度传感器设置在执行正常洗涤动作时外筒中的水能到达的高度以下,那么在整个洗涤工序中,浊度传感器仍然有较长的时间浸没在洗涤水中,洗涤水中的污垢可能会在此期间吸附在浊度传感器上,影响浊度传感器的检测精度。
28、所以浊度传感器可能会设置在执行正常洗涤动作时外筒中的水能到达的高度以上,此时内筒按照正常的洗涤转速无法将外筒中的洗涤水提升到浊度传感器的高度,所以需要控制内筒加速,通过内筒更高的转速,将洗涤水提升到浊度传感器的高度,这样既能够实现对洗涤水浊度的检测,也能最大程度避免洗涤水中的污垢吸附浊度传感器。
29、7.洗涤设备一般会设置多个水量档位,所以在实际洗涤中,高水量档位时,内筒在执行正常的洗涤转速时,就可以将洗涤水提升到浊度传感器的高度;低水量档位时,内筒仅凭正常的洗涤转速,无法将洗涤水提升到浊度传感器的高度,需要进行额外的加速。
30、根据实际水量判断在检测浊度时内筒是否需要额外加速,可以避免在无需加速的时候加速,增加洗涤设备电机的负荷,打乱正常的洗涤程序。
31、在实际水量较低时,水量越低,内筒想要将洗涤水提升到浊度传感器的高度需要的转速就越高。
32、8.在待处理衣物污垢较多的情况下,虽然浊度传感器高于水位线,但是依然可能在洗涤衣物后沉积大量污垢,所以需要预设浊度值nmax,在本次洗涤时,如果实际浊度值n≥nmax,就应该认定本次洗涤后浊度传感器沉积了一定的污垢,如果等待下次使用时才进行清洗,这部分污垢很可能就会固结在浊度传感器上,仅凭进水冲刷难以清洁,所以需要在洗涤后及时控制再次进水,将污垢冲洗干净。
33、9.因为浊度传感器的位置是高于水位线的,所以浊度传感器的大部分时间都暴露在空气中,只有少部分时间浸没在洗涤水中。浊度传感器本身无法判断自己在检测的是洗涤水还是空气,也就无法判定检测的浊度值是空气的浊度值还是洗涤水的浊度值,影响检测结果的准确性。
34、一般来讲,空气的浊度值是要低于洗涤水的,通过预设一个浊度值n0,当获取到的浊度传感器读数n≥n0时,可以认为此时检测到的浊度是洗涤水的浊度,读数有效;如果n<n0,可以认为此时检测的是空气的浊度,读数作废。从而准确区分有效读数和无效读数,提高洗涤水浊度检测的准确性。
35、10.浊度传感器安装在外筒的一侧,内筒正转反转各一次为一周期,一周期内洗涤水会浸没浊度传感器一次,所以在一周期内读取两次浊度传感器读数,一次为测定洗涤水的浊度,一次为测定空气的浊度,其中较大的读数,即为洗涤水的浊度。
36、下面结合附图对本发明的具体实施方式作进一步详细的描述。
本文地址:https://www.jishuxx.com/zhuanli/20240802/259965.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表