一种基于贪心策略的煤矸分拣机器人动态规划方法及系统
- 国知局
- 2024-08-08 16:52:26
本发明属于分拣,尤其是涉及一种基于贪心策略的煤矸分拣机器人动态规划方法及系统。
背景技术:
1、煤矸分拣机器人是针对解决原煤生产运输中的矸石剔除难题的煤矿机器人,是实现煤炭清洁利用和绿色生产的有效方式。煤矸分拣机器人主要分为缆索驱动型、直角坐标型和并联机器人型。在并联型的煤矸分拣机器人方面,delta机器人具有结构刚度大、运行速度快等优点,满足煤矸分拣的需求。
2、分拣规划是煤矸分拣机器人生产作业中的重要问题,合理的分拣次序和分拣路径可以减少机器人作业的移动行程、时间和能耗,提高分拣效率并降低分拣能耗,具有非常重要的研究价值。机器人分拣按照传送带是否停止分为静态分拣和动态分拣,静态的分拣规划问题类似于旅行商问题(tsp),常用的规划算法包括了遗传算法、模拟退火算法、人工神经网络算法、蚁群算法等;而在动态的分拣规划问题中,待分拣物体随着传送带运动,其坐标位置随时间发生变化,其动态规划的路径和空间更加复杂,无法直接应用静态的分拣规划算法进行求解。
3、在煤矸石分拣方面,wang等在“trajectoryplanning for coal gangue sortingrobot tracking fast-mass target under multiple constraints.”中针对煤矸分拣机器人的抓取冲击问题,提出了一种基于时间最小的机械手动态跟踪矸石的数学模型并使用粒子群优化算法进行了求解,提高了机器人目标跟踪精度和矸石抓取成功率。wu等在“multi-task allocation framework ofcoal gangue sorting robot system forthetime-varying raw coal flow.”中构建了时变原煤流的多任务分配框架,提出了一种基于m/m/s排队模型的多任务分配模型,创建了矸石分拣区环境状态的求解迭代机制,通过贪心算法的自适应权值规则提高了矸石分拣任务的分配效率,实验结果表明该框架理论在不同矸石流密度条件下的多分拣任务调度中具有良好的适应性和分拣效果。在矸石图像定位方面,li等在“image positioning and identification method and system for coal andgangue sorting robot.”中提出一种通过图像处理对煤矸石进行定位和识别的方法,采用三种阈值自动分割方法对煤矸图像进行二值化处理的聚类方法,且针对煤矸石的灰度和纹理特征与对比度结合的联合特征分类器在实验中具有良好的定位和识别效果。
4、在动态规划分拣算法方面,zhang等在“simultaneous path planning andtrajectory optimization for high-speed sorting system.”针对delta机器人的多物料快速分拣问题进行了研究,优化了分拣轨迹和速度曲线,通过贪心策略进行动态分拣规划,提高了分拣系统的工作效率。但是该分拣算法未考虑多物料分拣的遗漏补偿问题,具有分拣遗漏的风险。zhao和wang在“sorting path optimization ofdelta robot based onimproved greedy algorithm.”中提出的改进贪心策略中考虑了物料分拣中的遗漏补偿问题,但是与前者相同都只能用于质量和大小近似的同种物料分拣工况中。chen等在“dynamic sorting planning ofa rectangular-coordinate robotbased on a greedystrategy.”中针对多种固体建筑垃圾的分拣优的动态分拣问题中优化了贪心策略并加入了遗漏补偿,实验结果表明该方法缩短了平均分拣时间和平均分拣行程,有效提高了分拣系统的工作效率。但是该贪心策略中的代价函数并未考虑待分拣物体的质量,仅以机器人分拣行程作为代价指标,无法实现降低分拣能耗的目标。
5、为此,本文提出一种考虑矸石质量、基于分拣能耗指标的改进贪心策略动态规划算法,结合煤矸图像识别和定位方法,以实现煤矸分拣机器人低能耗和高效率的分拣规划,并通过建立仿真模拟实验进行验证该算法的有效性。
技术实现思路
1、本发明的目的是提供一种基于贪心策略的煤矸分拣机器人动态规划方法及系统,解决上述技术存在的现有的分拣任务中,所采用的分拣策略算法灵活性差、分拣路线重复和效率低的问题。
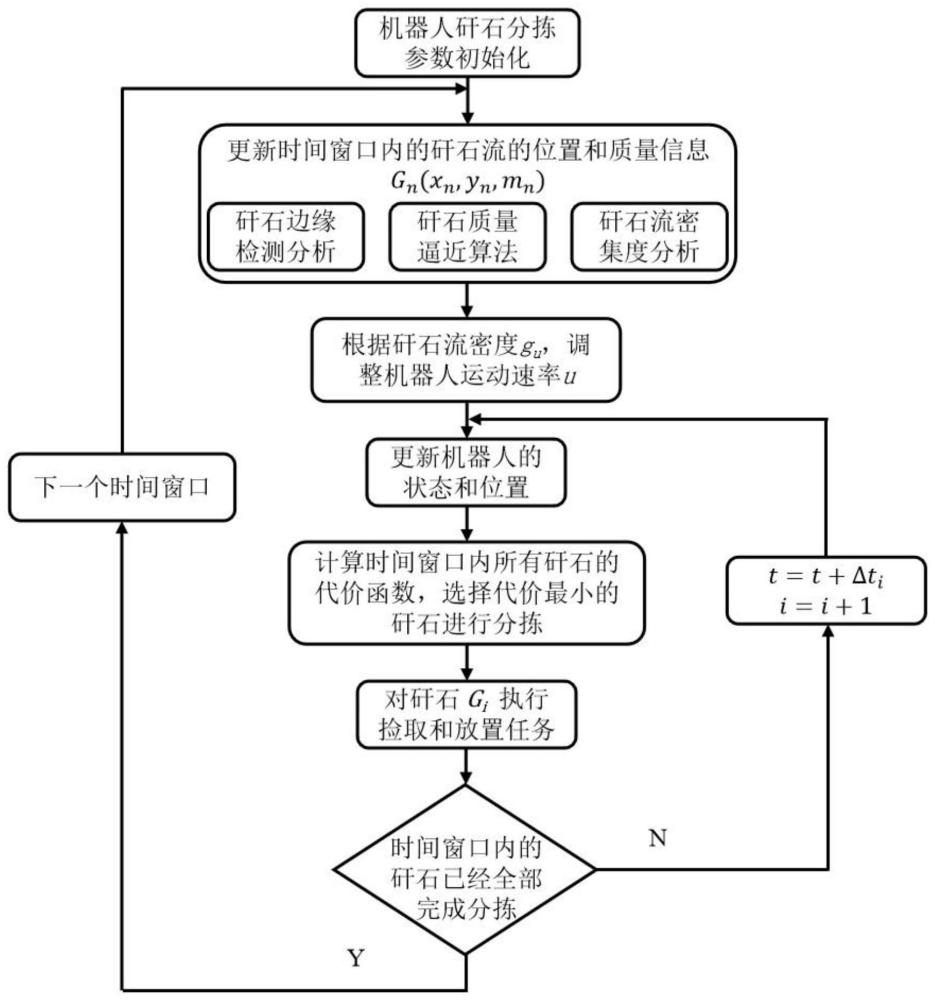
2、为实现上述目的,本发明提供一种基于贪心策略的煤矸分拣机器人动态规划方法,包括以下步骤:
3、步骤1、delta矸石分拣机器人的分拣参数初始化,包括初始化时间窗口t、传送带两侧的矸石仓位置pj、delta矸石分拣机器人最大移动加速度amax和最大移动速率umax、分拣工作区域[xmin,xmax]、单次最短分拣时间tmin、动平台等效质量md'、门字型轨迹的高度h、圆弧半径h/2和传送带运行速度vbelt;
4、步骤2、更新时间窗口内的矸石流的位置和质量信息gn(xn,yn,mn);
5、步骤3、根据时间窗口内的矸石流密度gu,调整delta矸石分拣机器人运动速率ur;
6、步骤4、更新delta矸石分拣机器人与矸石的位置;
7、步骤5、计算时间窗口内所有矸石的代价函数,选择代价最小的矸石进行分拣;
8、步骤6、对矸石gi执行捡取和放置任务;
9、步骤7、判断时间窗口内的矸石是否已经全部完成了分拣。
10、优选的,步骤2的具体过程如下:
11、s21、通过矸石图像定位算法计算出每一个矸石的位置gi(xi,yi,t0),通过矸石图像质量逼近算法估算出每一个矸石的质量mi;
12、s22、将位置和质量信息一一对应且合并为gn(xn,yn,mn,t0)返回给煤矸分拣机器人系统;
13、s23、煤矸分拣机器人系统实时记录并更新矸石流的位置和质量信息表,并以时间窗口t为一个时间周期对煤矸传送带上的矸石流进行区域划分,煤矸机器人分拣系统把传送带上即将进入delta矸石分拣机器人分拣区域的第一个时间窗口作为当前工作的时间窗口,并将该窗口内的矸石流数据发送给机器人动态分拣规划算法模块。
14、优选的,s21中矸石位置计算和矸石质量估算的具体公式如下:
15、
16、
17、式中,ui和vi表示矸石在像素坐标系中的像素坐标,u0和v0表示图像坐标系中坐标原点在像素坐标系中的像素坐标,为相机内部参数,rcw和tcw为delta矸石分拣机器人坐标系到图像坐标系的旋转和平移变换矩阵,zi表示相机到传送带的高度,px为矸石边缘点到平分线的垂线的距离,xmax和xmin分别表示矸石边缘点在x方向上的最大值和最小值;vi表示矸石i的体积,ρi表示矸石i的密度。
18、优选的,步骤3的具体过程如下:
19、s31、机器人动态分拣规划算法模块对当前工作的时间窗口内的矸石流数据进行分析,统计当前窗口内的矸石数量,为矸石流密度gu;
20、s32、针对矸石流密度gu,调整delta矸石分拣机器人运动速率ur,具体调整关系如下:
21、
22、其中,umax表示delta矸石分拣机器人最大分拣移动速率,gmax表示在最大分拣速率下所能完全分拣的最大矸石流密度。
23、优选的,步骤4中更新delta矸石分拣机器人与矸石的位置的具体过程如下:
24、s41、delta矸石分拣机器人完成上一次分拣任务后,更新delta矸石分拣机器人动平台抓手的位置坐标;
25、s42、根据传送带速度vbelt和delta矸石分拣机器人系统时间t,更新当前时间窗口内矸石流的位置坐标gi(xi,yi,t0),具体计算公式如下:
26、
27、式中,矸石的坐标单位为mm,传送带速度vbelt单位为mm/s,delta矸石分拣机器人系统时间t的单位为s。
28、优选的,步骤5的具体过程如下:
29、s51、根据当前时间窗口内未被分拣的矸石流坐标位置信息,判断当前分拣区域内是否有矸石;如果当前分拣区域内没有矸石,则等待当前时间窗口的矸石进入delta矸石分拣机器人的分拣区域,当矸石即将进入分拣区域时,对当前时间窗口内的所有待分拣矸石执行改进贪心策略分拣规划算法,根据每一个矸石的坐标和质量信息,计算每一个矸石分拣的代价函数l(g(t));如果当前分拣区域内有未分拣的矸石,则对在分拣区域内所有矸石执行改进贪心策略分拣规划算法,根据每一个矸石的坐标和质量信息,计算每一个矸石分拣的代价函数l(g(t)),代价函数l(g(t))的具体计算公式如下:
30、
31、
32、
33、
34、式中,为delta矸石分拣机器人拾取矸石i的能耗;为delta矸石分拣机器人放置矸石i的能耗;mi为矸石i的质量;md′为动平台等效质量;为矸石i的坐标;为矸石i-1对应的矸石仓坐标;为矸石i对应的矸石仓坐标,α为补偿系数,由矸石流密度gu决定;为贪心策略的遗漏补偿函数;δx=xmax-xmin,tmin为单次最短分拣时间;
35、s52、将改进贪心策略分拣规划算法计算得到的每一个矸石的分拣代价函数进行比较,选择代价最小的矸石作为本次任务需要分拣的矸石;
36、s53、根据所选择的矸石的坐标位置和delta矸石分拣机器人的分拣移动速率ur,计算矸石的实际分拣坐标位置;
37、s54、判断选择的矸石的实际分拣坐标是否超出了delta矸石分拣机器人的分拣工作区域;如果实际分拣坐标没有超出分拣工作区域,则将该实际分拣坐标传送给delta矸石分拣机器人执行捡取和放置任务;如果选择的矸石的实际分拣坐标超出了分拣工作区域,那么所选择的矸石无法分拣,返回到s52选择代价次之的矸石,并执行后续步骤。
38、优选的,步骤6的具体过程如下:
39、s61、煤矸机器人分拣系统根据矸石实际分拣坐标和delta矸石分拣机器人动平台抓手位置坐标,生成门字型轨迹并规划delta矸石分拣机器人的改进梯形加速度曲线,同样,根据矸石实际分拣坐标和矸石对应的矸石仓坐标,生成门字型轨迹并规划delta矸石分拣机器人的改进梯形加速度曲线;
40、s62、delta矸石分拣机器人按照所规划的轨迹和速度,运动到矸石实际分拣坐标,执行矸石的捡取任务;同样地,依据规划的轨迹和速度,运动到矸石对应的矸石仓,执行矸石的放置任务;记录delta矸石分拣机器人动平台抓手位置坐标和本次分拣任务所花时间ti。
41、优选的,delta矸石分拣机器人在门字型轨迹运动中,根据delta矸石分拣机器人的速度变化和轨迹分为三个阶段,第一阶段为加速阶段,delta矸石分拣机器人速度从0加速到ur,对应的门字型轨迹为第一段直线轨迹;第二阶段为匀速运动阶段,delta矸石分拣机器人速度保持ur不变,对应的门字型轨迹为两个圆弧过渡段和中间的直线段轨迹;第三阶段为减速阶段,delta矸石分拣机器人速度从ur减速到0,对应的门字型轨迹为第三段直线轨迹;门字型轨迹运动在加速阶段的加速度和行程公式如下:
42、
43、
44、a0为delta矸石分拣机器人在本次门字型轨迹中的最大移动加速度,t0为加速阶段的总时间。
45、优选的,步骤7中判断当前时间窗口内的矸石是否已经全部被分拣的具体情况如下:如果所有矸石已经被分拣,则返回步骤2,执行下一个时间窗口的分拣任务,同时delta矸石分拣机器人动平台转手回到机器人系统的初始位置(x0,y0);如果当前时间窗口内的矸石没有全部完成分拣,则分为两种情况:第一种情况是delta矸石分拣机器人只分拣了部分矸石,分拣区域内仍有待分拣矸石或者仍有矸石未进入分拣区域,则delta矸石分拣机器人需要继续完成矸石分拣任务,返回步骤4,执行下一个矸石的分拣任务,更新delta矸石分拣机器人系统时间为:t=t+ti;第二种情况是矸石流密度较大,delta矸石分拣机器人只完成了部分矸石的分拣任务,剩下未分拣的矸石已经离开了分拣区域,delta矸石分拣机器人已经完成了当前时间窗口的矸石分拣任务,返回步骤2,执行下一个时间窗口的分拣任务,同时delta矸石分拣机器人动平台抓手回到机器人系统的初始位置(x0,y0)。
46、本发明还提供一种基于贪心策略的煤矸分拣机器人动态规划系统,包括煤矸传送带、矸石仓、视觉系统、运动控制系统和delta矸石分拣机器人,视觉控制系统对煤块和矸石进行实时的识别并将矸石流的位置和图像信息进行处理并发送给计算机中的机器人动态分拣规划算法模块;由运动控制系统完成对delta矸石分拣机器人的分拣控制,完成对矸石的分拣抓取和放置任务。
47、因此,本发明采用上述一种基于贪心策略的煤矸分拣机器人动态规划方法及系统,具有以下有益效果:
48、(1)本文考虑煤矸石分拣质量与路径,引入质量与路径乘积的能耗指标作为分拣规划的最优化函数,更贴近与实际的矸石分拣需求;
49、(2)针对煤矸分拣机器人规划问题,设计了改进的贪心策略动态规划算法,相对于传统的顺序规划算法,节省了分拣能耗和分拣时间,有效提高了矸石分拣效率和能量利用率。
50、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
本文地址:https://www.jishuxx.com/zhuanli/20240808/270921.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。