基于速度可靠性系数的改进粒子滤波的弹道轨迹估计方法
- 国知局
- 2024-08-08 16:55:13
本发明属于弹道轨迹估计,特别涉及一种基于速度可靠性系数的改进粒子滤波的弹道轨迹估计方法。
背景技术:
1、弹丸在打击目标时离不开对自身位置速度姿态等轨迹信息的获取,这是后续制导和控制的前提,弹道位姿估计作为弹道领域内一项关键技术,一直以来都是国内外学者研究的重点内容。作为弹丸轨迹信息实时测量的重要途经之一,全球导航定位系统因其绝对定位精度高,误差不随时间累积的优点而获得了广泛的应用。但其易受干扰的特性也使得若只使用这一个传感器进行弹道测量会存在较大的偏差,尤其是对于二维修正引信来说,为了压缩成本与重量,往往只在引信侧壁安装一个接收机天线,这虽然使引信具备了卫星测姿的功能,但也增加了卫星定位与测速受干扰的风险,尤其测速精度会大幅降低,速度波动明显,这对于后续的修正控制十分不利。
技术实现思路
1、基于上述问题,本发明提出一种基于速度可靠性系数的改进粒子滤波的弹道轨迹估计方法,该方法能够实现对弹丸轨迹的精确估计。
2、实现本发明的技术方案如下:
3、一种基于速度可靠性系数的改进粒子滤波的弹道轨迹估计方法,具体过程为:
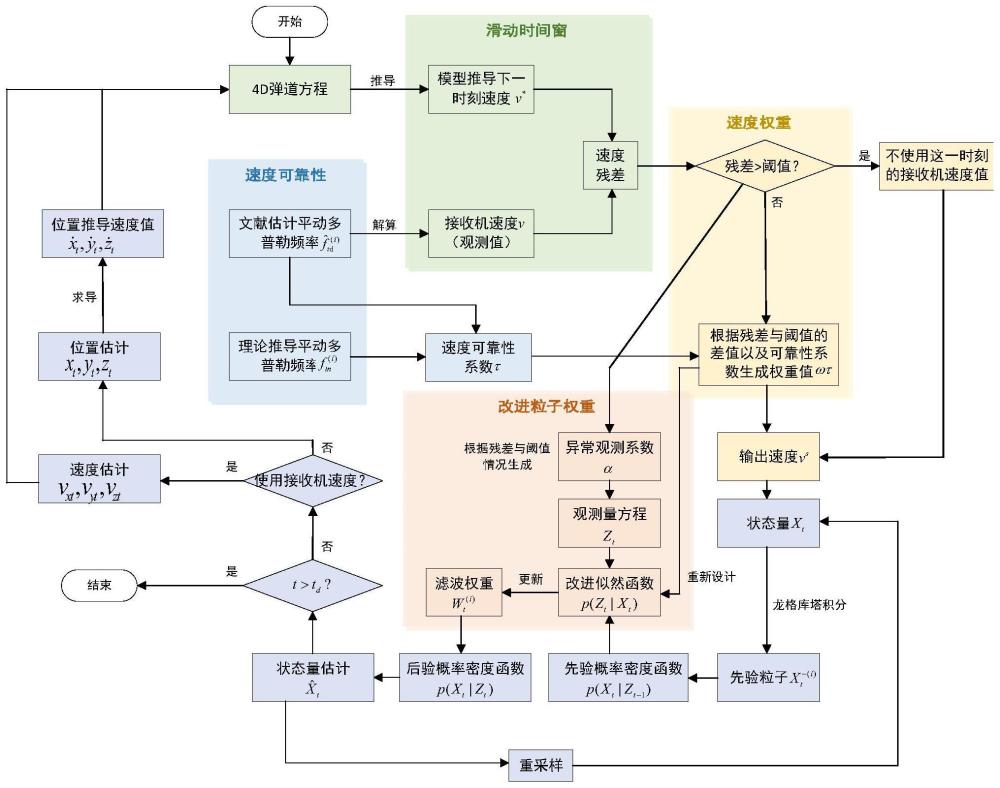
4、基于实际计算出的平动多普勒频率与理论推导的平动多普勒频率的关系,设置速度可靠性系数τ;设定滑动时间窗,计算时间窗内的速度残差值,并根据所述残差值距离阈值的程度,生成速度权重值w;
5、根据所述速度可靠性系数τ和速度权重值w,计算融合速度信息,更新弹丸在飞行过程中状态变量,基于所述状态信息获得先验概率密度函数;
6、根据所述速度可靠性系数τ和速度权重值w,计算所述相对权重系数,对粒子滤波中的似然函数进行改造,从而动态更新粒子权重值;
7、基于所述先验概率密度函数以及似然函数,获得后验概率密度函数,利用所述后验概率密度函数计算出粒子轨迹的状态估计值。
8、进一步地,本发明基于实际计算出的平动多普勒频率与理论推导的平动多普勒频率的关系,设置速度可靠性系数τ为:
9、计算实际计算出的弹丸平动多普勒频率与理论推导值的差值,与理论推导值做比,所述速度可靠性系数τ与所述比值成反比,且速度可靠性系数τ最大值为1。
10、进一步地,本发明所述速度可靠性系数τ为:
11、
12、其中,n为参与测速的总星数,为第i颗星最终估计出的弹丸平动多普勒频率,为第i颗星理论推导出的弹丸平动多普勒频率。
13、进一步地,本发明当时间窗内的速度残差时,生成速度权重值w为:
14、
15、其中,rvx、rvy、rvz分别表示三个方向上时间窗内的速度残差值距离阈值的程度,分别为设定三个方向速度残差阈值;
16、当所述满足其一时,
17、wvx=0、wvy=0、wvz=0。
18、进一步地,本发明所述计算融合速度信息为:
19、
20、其中,为接收机在te时刻计算的速度,为te时刻理论速度。
21、进一步地,本发明所述基于所述速度可靠性系数和所述速度权重值所计算出所述相对权重系数;
22、
23、进一步地,本发明设定条件:①状态独立性假设:状态方程在任意时刻的状态只与上一时刻的状态相关;②观测独立性假设:任意时刻的观测只依赖于该时刻的状态,与其他时刻观测及状态无关;
24、对粒子滤波中的似然函数进行改造,所获得的似然函数为:
25、
26、其中,α为异常观测系数,zt(·)表示传感器实际观测值,h1(·)、h2(·)表示根据状态值以及观测矩阵估计出的观测值。n为当前时刻的实际针对粒子的传感器观测值,u=(ux,uy,uz)为根据状态值以及观测矩阵估计出的观测值,σ=(σx,σy,σz)为预设三个方向上接收机的位置噪声的均方差,σv=(σvx,σvy,σvz)为预设的三个方向上接收机速度噪声的均方差,σγ′为转速噪声均方差,为融合速度,(xt yt zt)为弹体的位置;γ′t为弹体转速。
27、进一步地,本发明所述α为:
28、
29、进一步地,本发明所述计算出状态估计值为:
30、
31、
32、
33、其中,p(zt|xt)为似然函数,为t-1时刻粒子滤波中的权重,为狄拉克函数,xt为t时刻弹丸在飞行过程中的状态变量,m为粒子的数量。
34、进一步地,本发明权重初始时刻粒子滤波中的权重为其中m为参与滤波的粒子数。
35、有益效果:
36、第一,本发明基于实际计算出的平动多普勒频率与理论推导的平动多普勒频率的关系设置速度可靠性系数;计算时间窗内的速度残差值,并根据所述残差值距离阈值的程度,生成速度权重值;基于上述可靠性系数和速度权重值进行似然函数的改造,能够避免单天线二维弹道修正引信速度位置测量易受干扰,波动较大的问题,实现对弹丸的位置速度具有更高的估计精度,且计算负担并未加重。
37、第二,本方法不仅依靠接收机提供的速度位置信息,还追本溯源,提取接收机在测量位置速度时用到的多普勒频移信息,生成可靠性系数,用以判断测量可靠性,相当于深度挖掘了接收机提供的测量信息,从而在一定程度上消减了速度波动带来的影响。
38、第三,相较于双天线修正引信,单天线二维弹道修正引信不仅可以实现卫星测姿功能,且传感器种类更少,可靠性更高,成本更低,非常适宜大批量作战使用,但其速度信息易受干扰,观测数据波动大的问题制约着其发展,本方法刚好在一定程度上解决了这个问题。
技术特征:1.基于速度可靠性系数的改进粒子滤波的弹道轨迹估计方法,其特征在于,具体过程为:
2.根据权利要求1所述基于速度可靠性系数的改进粒子滤波的弹道轨迹估计方法,其特征在于,基于实际计算出的平动多普勒频率与理论推导的平动多普勒频率的关系,设置速度可靠性系数τ为:
3.根据权利要求2所述基于速度可靠性系数的改进粒子滤波的弹道轨迹估计方法,其特征在于,所述
4.根据权利要求2或3所述基于速度可靠性系数的改进粒子滤波的弹道轨迹估计方法,其特征在于,当时间窗内的速度残差时,生成速度权重值w为:
5.根据权利要求4所述基于速度可靠性系数的改进粒子滤波的弹道轨迹估计方法,其特征在于,所述计算融合速度信息为:
6.根据权利要求4所述基于速度可靠性系数的改进粒子滤波的弹道轨迹估计方法,其特征在于,所述基于所述速度可靠性系数和所述速度权重值所计算出所述相对权重系数;
7.根据权利要求6所述基于速度可靠性系数的改进粒子滤波的弹道轨迹估计方法,其特征在于,设定条件:①状态独立性假设:状态方程在任意时刻的状态只与上一时刻的状态相关;②观测独立性假设:任意时刻的观测只依赖于该时刻的状态,与其他时刻观测及状态无关;
8.根据权利要求7所述基于速度可靠性系数的改进粒子滤波的弹道轨迹估计方法,其特征在于,所述α为:
9.根据权利要求1所述基于速度可靠性系数的改进粒子滤波轨迹估计方法,其特征在于,所述计算出状态估计值为:
10.根据权利要求9所述基于速度可靠性系数的改进粒子滤波的弹道轨迹估计方法,其特征在于,权重初始时刻粒子滤波中的权重为其中m为参与滤波的粒子数。
技术总结本发明提供一种基于速度可靠性系数的改进粒子滤波轨迹估计方法,过程为:基于实际计算出的平动多普勒频率与理论推导的平动多普勒频率的关系,设置速度可靠性系数;设定滑动时间窗,计算时间窗内的速度残差值,并根据所述残差值距离阈值的程度,生成速度权重值;根据所述速度可靠性系数和速度权重值,计算融合速度信息,更新弹丸在飞行过程中状态变量,基于所述状态信息获得先验概率密度函数;根据所述速度可靠性系数和速度权重值,计算所述相对权重系数,对粒子滤波中的似然函数进行改造,从而动态更新粒子权重值;基于所述先验概率密度函数以及似然函数,获得后验概率密度函数,利用所述后验概率密度函数计算出粒子轨迹的状态估计值。技术研发人员:申强,梁晨,李红云,邓子龙,田凌蕴,陈泽豪受保护的技术使用者:北京理工大学技术研发日:技术公布日:2024/8/5本文地址:https://www.jishuxx.com/zhuanli/20240808/271205.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表