一种无人驾驶汽车模拟沙盘的制作方法
- 国知局
- 2024-08-08 16:55:46
本发明涉及无人驾驶汽车,具体为一种无人驾驶汽车模拟沙盘。
背景技术:
1、智能驾驶的关键技术可概述为感知、规划与控制三部分,其中利用传感器实现车辆感知是智能驾驶的基础。车辆配备的传感器主要可以分为三类:定位传感器、自感应传感器和环境传感器。定位传感器可以获得车辆在全球和本地的绝对定位,通常是利用gps或gps融合其他传感器数据进行定位;自感应传感器利用里程表、imu等获取车辆速度、加速度和转向角等当前状态;环境传感器使用超声波、激光、视觉等外部感知传感器感知道路标记、障碍物位置、交通标志和其他车辆距离、运动速度等信息。不同传感器融合后进行决策,进而控制车辆执行自动驾驶行为。
2、考虑到部分智能驾驶功能不成熟存在一定危险性,且实际车辆实验要求场地空间大,因此需要一种无人驾驶测试沙盘来进行无人驾驶实验,普通的沙盘系统无法满足车辆行驶时可能会遇到的各种情况,因此实验的拟真度会较低。
3、因此,设计实用性强和可与城市路面情况高度拟真的一种无人驾驶汽车模拟沙盘是很有必要的。
技术实现思路
1、本发明的目的在于提供一种无人驾驶汽车模拟沙盘,以解决上述背景技术中提出的问题。
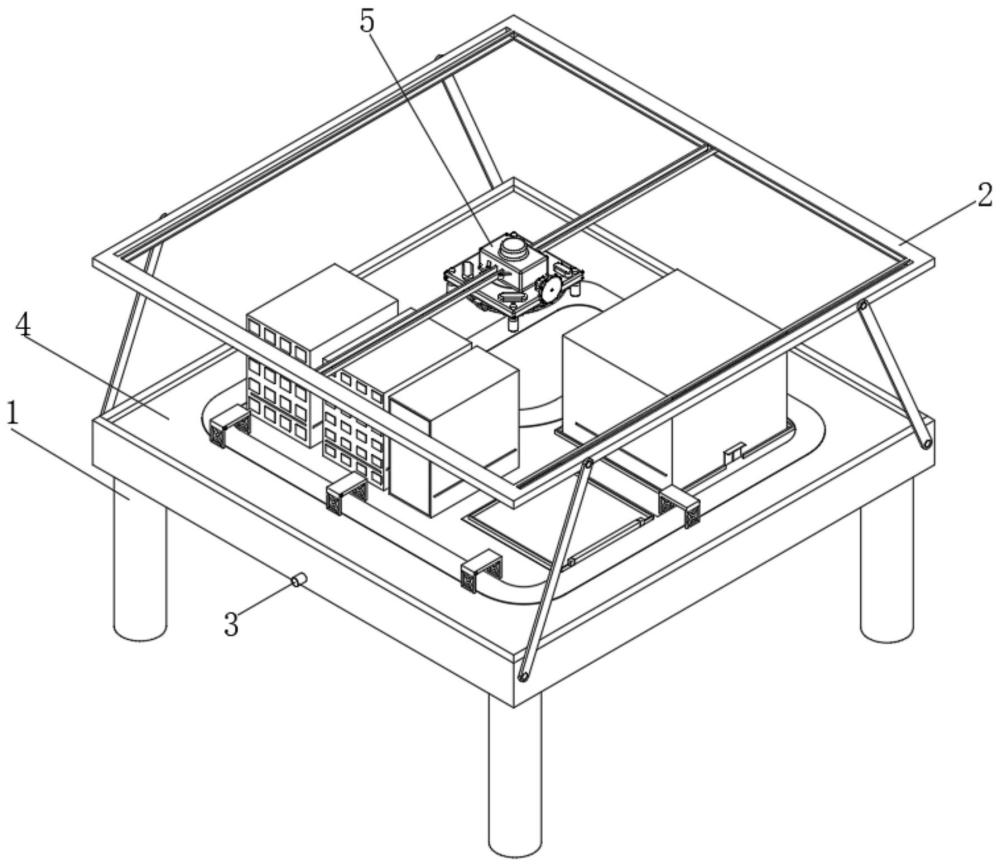
2、为了解决上述技术问题,本发明提供如下技术方案:一种无人驾驶汽车模拟沙盘,包括支撑底座,所述支撑底座的外壁固定连接有支架,所述支撑底座的侧壁固定连接有排水管,且所述排水管将支撑底座的内部与支撑底座的外侧连通设置,所述支架的上侧设置有跟随机构,所述支撑底座的内部上侧设置有倾斜机构;
3、所述倾斜机构包括支撑组件以及可进行偏移的安装板,所述安装板可在支撑底座的内部进行偏转,且所述安装板的上侧固定连接有建筑拟真盒,所述建筑拟真盒的下侧与安装板的下侧连通。
4、根据上述技术方案,所述支撑组件包括铰接杆,所述铰接杆的两端与支撑底座的内壁通过轴承转动连接,所述铰接杆的中部上侧与安装板的下表面固定连接,所述安装板远离铰接杆的一侧下表面铰接有液压支撑杆,所述液压支撑杆的下端与支撑底座的内壁铰接,所述安装板的上表面设置有路面轨道,所述路面轨道的上侧设置有拟真限高架,所述拟真限高架的下端与安装板的上表面固定连接,所述拟真限高架的一侧固定连接有测速探头。
5、根据上述技术方案,所述建筑拟真盒的侧壁开设有排雾缝,且所述建筑拟真盒的下侧设置有若干雾化器,所述雾化器的下端与支撑底座的上侧固定连接,且所述雾化器的上侧朝向建筑拟真盒的内部下侧。
6、根据上述技术方案,所述跟随机构包括滑轨,所述滑轨的两端均与支架的上侧滑动连接,且所述滑轨的外壁滑动连接有移动桩,所述移动桩的下侧固定连接有安装座,所述安装座的上表面分别固定连接有信号传输模块、启闭控制模块、处理模块,且所述安装座的下侧固定连接有加热灯,所述安装座的中部开设有安装口,所述安装口的内部设置有拟真机构。
7、根据上述技术方案,所述拟真机构包括连接盒,所述连接盒的外壁与安装口的内壁固定连接,所述连接盒的下侧固定连接有喷淋头,所述连接盒的上侧固定连接有进水管,所述进水管通过连接盒与喷淋头的内部连通设置,所述安装座的下表面还固定连接有激光标点发射器,所述激光标点发射器的外侧设置有玻璃罩,所述玻璃罩的上表面与安装座的下侧接触,所述玻璃罩的外侧设置有固定轨,所述固定轨的上表面与安装座的下表面固定连接,所述固定轨的内壁滑动连接有齿环,所述齿环的一侧下部固定连接有擦块,所述擦块的外壁与玻璃罩的外壁接触,所述安装座的上侧固定连接有驱动电机,所述驱动电机的输出端固定连接有齿轮,所述齿轮的下侧与齿环的上侧啮合,所述固定轨的下侧固定连接有视觉摄像头。
8、根据上述技术方案,所述移动桩通过线性电机与滑轨连接,所述滑轨通过线性电机与支架连接,所述视觉摄像头与处理模块电性连接,所述处理模块与移动桩、滑轨连接处的线性电机以及滑轨、支架连接处的线性电机电性连接,所述激光标点发射器与启闭控制模块电性连接,所述启闭控制模块与操作终端电连接,所述进水管的上侧与外部供水装置连接,所述外部供水装置、驱动电机、雾化器、加热灯、液压支撑杆均与启闭控制模块电性连接,测试小车与信号传输模块电性连接,所述信号传输模块与操作终端电性连接,所述测速探头与信号传输模块电性连接。
9、与现有技术相比,本发明所达到的有益效果是:本发明通过设置有安装板以及建筑拟真盒、拟真限高架、测速探头等装置,使其配合测试小车对现实使用场景进行模拟,达到提供模拟测试的目的;
10、通过设置的可移动的安装座以及喷淋头等结构,使本装置可模拟实际使用场景中的降雨等情况,进而提高使用过程中的拟真度;
11、通过设置有可旋转的擦块以及玻璃罩可避免激光标点发射器在喷淋水分时被影响,并且可在使用过程中模拟视觉系统失灵等情况;
12、通过设置有可倾斜的安装板等结构,使本装置在使用后可快速排水烘干,进而避免使用中造成的积水损坏。
技术特征:1.一种无人驾驶汽车模拟沙盘,包括支撑底座(1),其特征在于:所述支撑底座(1)的外壁固定连接有支架(2),所述支撑底座(1)的侧壁固定连接有排水管(3),且所述排水管(3)将支撑底座(1)的内部与支撑底座(1)的外侧连通设置,所述支架(2)的上侧设置有跟随机构(5),所述支撑底座(1)的内部上侧设置有倾斜机构(4);
2.根据权利要求1所述的一种无人驾驶汽车模拟沙盘,其特征在于:所述支撑组件包括铰接杆(401),所述铰接杆(401)的两端与支撑底座(1)的内壁通过轴承转动连接,所述铰接杆(401)的中部上侧与安装板(402)的下表面固定连接,所述安装板(402)远离铰接杆(401)的一侧下表面铰接有液压支撑杆(407),所述液压支撑杆(407)的下端与支撑底座(1)的内壁铰接,所述安装板(402)的上表面设置有路面轨道,所述路面轨道的上侧设置有拟真限高架(405),所述拟真限高架(405)的下端与安装板(402)的上表面固定连接,所述拟真限高架(405)的一侧固定连接有测速探头(406)。
3.根据权利要求2所述的一种无人驾驶汽车模拟沙盘,其特征在于:所述建筑拟真盒(403)的侧壁开设有排雾缝(404),且所述建筑拟真盒(403)的下侧设置有若干雾化器(408),所述雾化器(408)的下端与支撑底座(1)的上侧固定连接,且所述雾化器(408)的上侧朝向建筑拟真盒(403)的内部下侧。
4.根据权利要求3所述的一种无人驾驶汽车模拟沙盘,其特征在于:所述跟随机构(5)包括滑轨(501),所述滑轨(501)的两端均与支架(2)的上侧滑动连接,且所述滑轨(501)的外壁滑动连接有移动桩(502),所述移动桩(502)的下侧固定连接有安装座(503),所述安装座(503)的上表面分别固定连接有信号传输模块(504)、启闭控制模块(505)、处理模块(508),且所述安装座(503)的下侧固定连接有加热灯(506),所述安装座(503)的中部开设有安装口,所述安装口的内部设置有拟真机构(507)。
5.根据权利要求4所述的一种无人驾驶汽车模拟沙盘,其特征在于:所述拟真机构(507)包括连接盒(701),所述连接盒(701)的外壁与安装口的内壁固定连接,所述连接盒(701)的下侧固定连接有喷淋头(703),所述连接盒(701)的上侧固定连接有进水管(702),所述进水管(702)通过连接盒(701)与喷淋头(703)的内部连通设置,所述安装座(503)的下表面还固定连接有激光标点发射器(704),所述激光标点发射器(704)的外侧设置有玻璃罩(705),所述玻璃罩(705)的上表面与安装座(503)的下侧接触,所述玻璃罩(705)的外侧设置有固定轨(706),所述固定轨(706)的上表面与安装座(503)的下表面固定连接,所述固定轨(706)的内壁滑动连接有齿环(707),所述齿环(707)的一侧下部固定连接有擦块(708),所述擦块(708)的外壁与玻璃罩(705)的外壁接触,所述安装座(503)的上侧固定连接有驱动电机(709),所述驱动电机(709)的输出端固定连接有齿轮(710),所述齿轮(710)的下侧与齿环(707)的上侧啮合,所述固定轨(706)的下侧固定连接有视觉摄像头(711)。
6.根据权利要求5所述的一种无人驾驶汽车模拟沙盘,其特征在于:所述移动桩(502)通过线性电机与滑轨(501)连接,所述滑轨(501)通过线性电机与支架(2)连接,所述视觉摄像头(711)与处理模块(508)电性连接,所述处理模块(508)与移动桩(502)、滑轨(501)连接处的线性电机以及滑轨(501)、支架(2)连接处的线性电机电性连接,所述激光标点发射器(704)与启闭控制模块(505)电性连接,所述启闭控制模块(505)与操作终端电连接,所述进水管(702)的上侧与外部供水装置连接,所述外部供水装置、驱动电机(709)、雾化器(408)、加热灯(506)、液压支撑杆(407)均与启闭控制模块(505)电性连接,测试小车与信号传输模块(504)电性连接,所述信号传输模块(504)与操作终端电性连接,所述测速探头(406)与信号传输模块(504)电性连接。
技术总结本发明公开了一种无人驾驶汽车模拟沙盘,本发明涉及无人驾驶汽车技术领域,包括支撑底座,所述支撑底座的外壁固定连接有支架,所述支撑底座的侧壁固定连接有排水管,且所述排水管将支撑底座的内部与支撑底座的外侧连通设置,所述支架的上侧设置有跟随机构,所述支撑底座的内部上侧设置有倾斜机构,本发明通过设置有安装板以及建筑拟真盒、拟真限高架、测速探头等装置,使其配合测试小车对现实使用场景进行模拟,达到提供模拟测试的目的,具有实用性强和可与城市路面情况高度拟真的特点。技术研发人员:张谦,贺彬,王丽,袁芳,彭德豹受保护的技术使用者:张谦技术研发日:技术公布日:2024/8/5本文地址:https://www.jishuxx.com/zhuanli/20240808/271261.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表