一种基于OpenCV和相似度匹配算法的产品质检方法及系统与流程
- 国知局
- 2024-08-19 14:18:06
本发明涉及产品质检,具体涉及一种基于opencv和相似度匹配算法的产品质检方法及系统。
背景技术:
1、各种产品在实际生产过程中会经过多个环节,而不同的环节均容易造成产品的外表造成损伤。另外,在产品的出货过程中,会粘贴各种标签用于对产品的功能、规格、使用注意事项进行说明。并且,在产品的生产过程中,为了提升产品外观,还会对产品进行背板丝印等操作。
2、当产品的外表损伤超过标准时,则生产出来的产品则属于不合格品,这类产品没有被及时检查出,直接发往客户处,当客户收到不符合期望和需求的产品,必然会影响到企业的声誉。
3、当产品上的标签粘贴错误时,客户在使用时,由于标签是错误的,则会导致客户在产品的使用上出现不符合使用要求的情形。
4、当产品上的背板丝印不符合要求时,生产出来的产品同样属于不合格品,同样地,这类产品没有及时被检查出,直接发往客户处,同样会影响到企业的声誉。
5、基于以上所述,对产品进行质检仍为重要。现有技术在对产品进行质检时,大量的依赖人工进行判断,因此经常会出现漏检、误检等情形,并且还导致质检效率低下。当不合格的产品发到现场后因为表面的划痕、标签粘贴错误或遗漏、背板丝印错误等问题导致产生退货、更换等售后问题,增加了企业的成本。
技术实现思路
1、为了克服现有技术的不足,本发明提供一种基于opencv和相似度匹配算法的产品质检方法及系统,用于解决现有技术采用人工的方式对产品进行质检,容易出现漏检、误检以及质检效率低下的技术问题,从而提高产品质检的准确性和效率,并且降低企业因退换货所造成的成本。
2、为解决上述问题,本发明所采用的技术方案如下:
3、一种基于opencv和相似度匹配算法的产品质检方法,包括以下步骤:
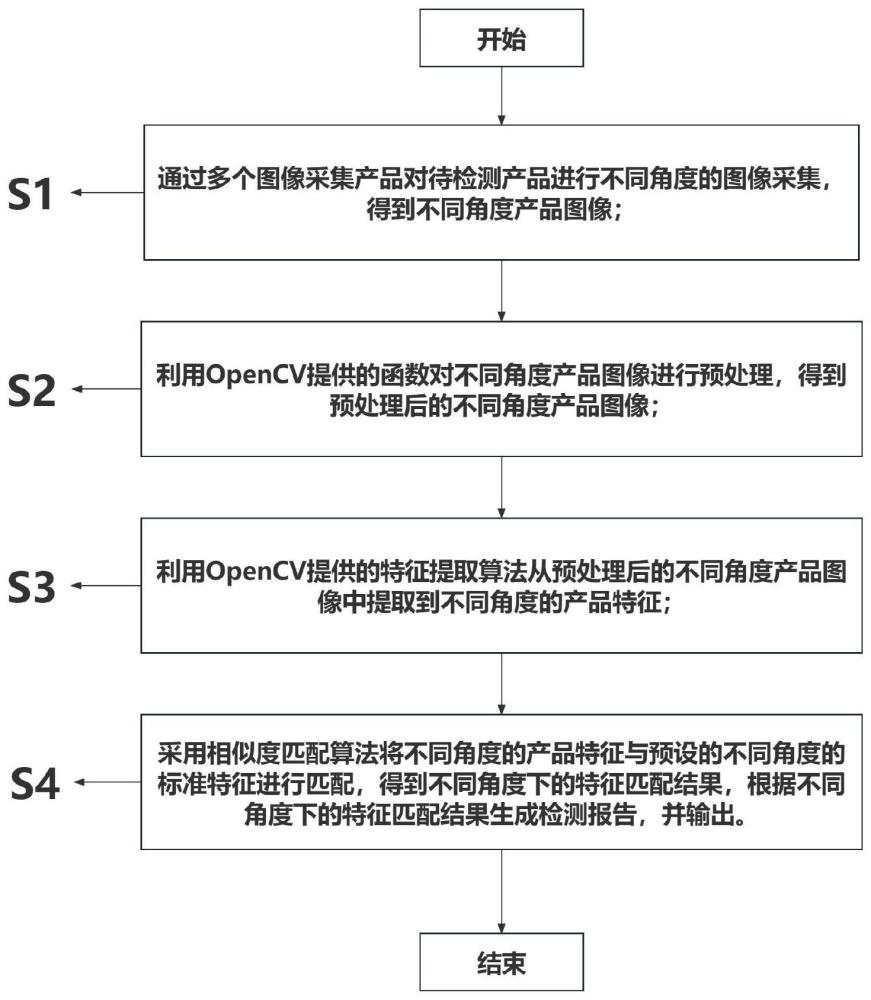
4、通过多个图像采集产品对待检测产品进行不同角度的图像采集,得到不同角度产品图像;
5、利用opencv提供的函数对所述不同角度产品图像进行预处理,得到预处理后的不同角度产品图像;
6、利用opencv提供的特征提取算法从所述预处理后的不同角度产品图像中提取到不同角度的产品特征;
7、采用相似度匹配算法将所述不同角度的产品特征与预设的不同角度的标准特征进行匹配,得到不同角度下的特征匹配结果,根据所述不同角度下的特征匹配结果生成检测报告,并输出。
8、作为本发明优选的实施方式,在利用opencv提供的函数对所述不同角度产品图像进行预处理时,包括:
9、调用opencv提供的高斯滤波函数gaussianblur()、双边平滑函数bilateralfilter()、增益函数sharp()以及融合函数addweighted()对所述不同角度产品图像进行预处理。
10、作为本发明优选的实施方式,在调用opencv提供的高斯滤波函数gaussianblur()进行预处理时,包括:
11、对所述不同角度产品图像的每一个像素进行滤波,得到对应像素滤波后的值;
12、其中,所述对应像素滤波后的值为相邻像素与一个滤波器模板大小的乘积;
13、将横向的滤波系数sigmax和竖向的滤波系数sigmay取相等,则所述滤波器模板大小,如公式1所示:
14、
15、式中,x和y分别代表行和列,滤波器模板的宽和高必须是奇数,ε、φ的和为1。
16、作为本发明优选的实施方式,在调用opencv提供的增益函数sharp()进行预处理时,包括:
17、对当前像素点q(x,y)经过增益处理后的像素点像素值f′q(x,y),如公式2所示:
18、f′q(x,y)=5×fq(x,y)-fq(x,y-1)-fq(x,y+1)-fq(x-1,y)-fq(x+1,y) (2);
19、式中,fq(x,y)为当前像素点像素值,fq(x,y-1)与fq(x,y+1)分别为前一和后一像素点像素值,fq(x-1,y)与fq(x+1,y)分别为上一点和下一点像素点像素值。
20、作为本发明优选的实施方式,在调用opencv提供的融合函数addweighted()进行预处理时,包括:
21、采用所述融合函数addweighted()将平滑处理后的图像和增益处理后的图像进行融合,并通过给平滑处理后的图像和增益处理后的图像赋予不同的权值,得到所述预处理后的不同角度产品图像。
22、作为本发明优选的实施方式,在利用opencv提供的特征提取算法提取产品特征时,包括:
23、采用opencv的内部函数cv2.findcontours对所述预处理后的不同角度产品图像的特征轮廓进行提取,并遍历提取到的特征轮廓;
24、利用sorted函数,对提取到的所有特征轮廓按从大到小的顺序进行排列;
25、利用轮廓周长函数和cv2.approxpolydp函数对特征轮廓进行多边形逼近;
26、其中,所述cv2.approxpolydp函数利用道格拉斯-普克算法实现轮廓相似化。
27、作为本发明优选的实施方式,在利用轮廓周长函数和cv2.approxpolydp函数对轮廓进行多边形逼近时,包括:
28、在曲线2个端点s、端点n连接1条直线sn;
29、获取曲线离所述直线sn距离最远的点与所述直线sn的距离f,并比较所述距离f与所述cv2.approxpolydp函数设定的阈值threshold的大小;
30、若所述距离f小于所述阈值threshold,则将所述直线sn作为所述曲线的近似;
31、若所述距离f大于等于所述阈值threshold,则在所述端点s和所述端点n之间添加两个分割点,加上所述端点s和所述端点n,得到四个点;
32、从所述端点s开始将所有点依次进行连接,以作为近似轮廓;
33、其中,所述四个点按顺序依次记录为左上ya、右上yt、左下na、右下nt。
34、作为本发明优选的实施方式,在对轮廓进行多边形逼近后,包括:
35、采用透视变换的方法进行倾斜校正,如公式3所示:
36、
37、式中,(x,y,z)为原始的图像像素点的齐次坐标,(x,y,z)为变换后的图像像素点的齐次坐标;
38、将z归一化得到齐次坐标则所述齐次坐标变换后的坐标对应的就是经过变换之后的二维平面坐标(x′,y′),此时s33=1,对所述公式3进行运算化简,得到公式4和公式5:
39、
40、
41、将所述左上ya、所述右上yt、所述左下na、所述右下nt代入所述公式4和所述公式5中,得到相应的w值和h值,并提取所述w值和所述h值的最大值,并根据所述最大值得到以左上角为初始点的透视变换后的产品特征。
42、作为本发明优选的实施方式,在采用相似度匹配算法进行匹配时,如公式6所示:
43、
44、式中,z为所述预处理后的不同角度产品图像的特征数目;m为不同角度标准产品图像的特征数目;dol为图像d第o个特征向量的第l维元素;rkl为图像r第k个特征向量的第l维元素;f(d,r)表征了所述预处理后的不同角度产品图像与所述不同角度标准产品图像间所有特征的平均距离;
45、当所述平均距离小于预设的阈值时,则所述特征匹配结果为合格,所述待检测产品质检通过;
46、当所述平均距离大于等于预设的阈值时,则所述特征匹配结果为不合格,所述待检测产品质检不通过。
47、一种基于opencv和相似度匹配算法的产品质检系统,包括:
48、图像预处理单元:用于利用opencv提供的函数对不同角度产品图像进行预处理,得到预处理后的不同角度产品图像;
49、产品特征提取单元:用于利用opencv提供的特征提取算法从所述预处理后的不同角度产品图像中提取到不同角度的产品特征;
50、特征匹配单元:用于采用相似度匹配算法将所述不同角度的产品特征与预设的不同角度的标准特征进行匹配,得到不同角度下的特征匹配结果,根据所述不同角度下的特征匹配结果生成检测报告,并输出;
51、其中,通过多个图像采集产品对待检测产品进行不同角度的图像采集,得到所述不同角度产品图像。
52、相比现有技术,本发明的有益效果在于:
53、(1)本发明通过调用opencv提供的函数对产品图像进行预处理,并对预处理后的产品图像进行特征提取,最后采用相似度匹配算法进行特征匹配,从而对产品的外观进行准确的分析、判断,以确保检测结果的准确性,减少因为人工的漏检导致的售后成本的支出;
54、(2)本发明所提供的方法通过与自动化流水线相结合,则可以实现产品外观的自动检查,减少人工的介入提高生产线的质量把控与产品品质的稳定;
55、(3)本发明所提供的方法减少了人工在产品质检过程中的参与度,提高了质检效率,降低企业的生产成本,提高了企业的竞争力。
56、下面结合附图和具体实施方式对本发明作进一步详细说明。
本文地址:https://www.jishuxx.com/zhuanli/20240819/274641.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表