基于图像处理的分合及储能指示牌状态识别方法及系统与流程
- 国知局
- 2024-08-22 14:17:24
本发明涉及图像识别,尤其涉及基于图像处理的分合及储能指示牌状态识别方法及系统。
背景技术:
1、随着人工智能和物联网技术的不断进步,智能化、数字化手段受到越来越多的重视,成为各行各业重要解决方案。在变电领域,传统的巡视方式已经无法满足当前高速发展的现代化社会需求,而智能巡检系统是随着电力行业的不断发展而逐渐兴起的一种智能化检测手段,智能巡检系统作为当今科技领域最炙手可热的话题之一,以其高效、准确和节省成本的特点,已经开始逐渐取代传统人工巡检模式,成为变电领域中设备自动智能识别的重要手段。
2、在变电领域智能巡视的设备中,主要包括了指针仪表、油位表、分合及储能指示牌等需要智能化分析的部件。有些设备,比如断路器,是用于保护电力系统的一种设备,它直接关系到变电站的运行安全和稳定性,可以在电路出现过载或短路时迅速跳闸,防止设备过热或烧毁,确保电路运行的安全可靠。而分合闸、储能指示器是断路器中的重要组成部分,其作用是指示断路器的分合、储能状态,提供给操作人员有关断路器当前状态的信息,保证安全操作。于是,在智能巡视过程中,操作人员对于分合、储能指示牌的状态识别精度会有更高的要求。而且,分合、储能指示牌外观样式繁多,有指针型、汉字型、i/o型等;指针样式有针型、箭头型(直线型和s型)、镂空型、三角形等,所述的指针就是用于分合、储能状态指向的标识区域;指针颜色有黄色、白色、红色、黑色等。
3、然而,到目前为止,智能巡视系统中仍没有一种通用性强、识别精度高的分合、储能指示牌的状态识别方法。基于以上问题,需要找到一种通用分合、储能指示牌状态识别方法。
技术实现思路
1、为了解决上述技术问题,本发明提供了基于图像处理的分合及储能指示牌状态识别方法,具体包括以下步骤:
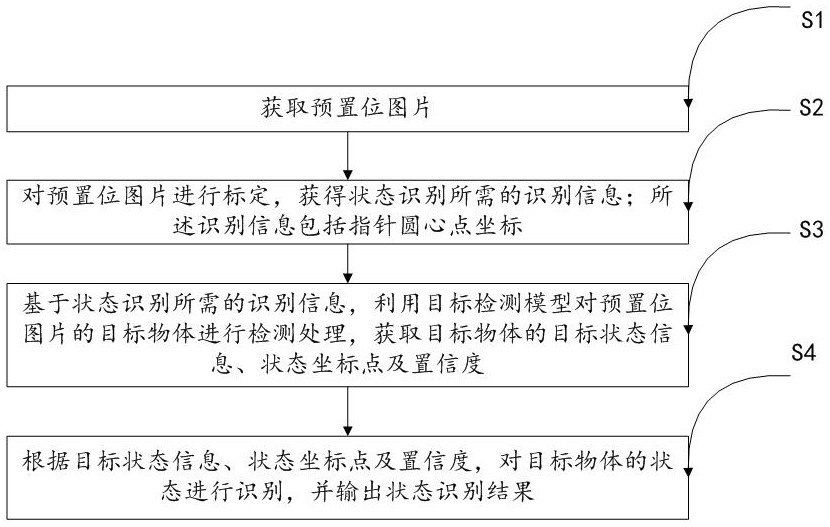
2、步骤s1,获取预置位图片;
3、步骤s2,对预置位图片进行标定,获得状态识别所需的识别信息;所述识别信息包括指针圆心点坐标;
4、步骤s3,基于状态识别所需的识别信息,利用目标检测模型对预置位图片的目标物体进行检测处理,获取目标物体的目标状态信息、状态坐标点及置信度;
5、步骤s4,根据目标状态信息、状态坐标点及置信度,对目标物体的状态进行识别,并输出状态识别结果。
6、进一步地,根据目标状态信息、状态坐标点及置信度,对目标物体的状态进行识别,具体包括以下步骤:
7、步骤s41,根据置信度进行目标物体筛选,将置信度最高的目标物体作为指针目标;
8、步骤s42,从预置位图片上截取所述指针目标所在的指针目标区域图像;
9、步骤s43,对指针目标区域图像进行预处理;
10、步骤s44,对预处理后的指针目标区域图像进行霍夫直线检测,获得若干检测直线;
11、步骤s45,通过边缘检测算法获取指针目标区域图像的指针轮廓线,并从若干检测直线中找出与指针轮廓线相同的真实直线;
12、步骤s46,确定真实直线的端点,并根据端点进行直线拟合,得到拟合直线,根据拟合直线得到指针轮廓线的顶点坐标;
13、步骤s47,根据顶点坐标计算指针圆心点坐标、状态坐标点之间的连线,与指针轮廓线的第三夹角,并确定第三夹角中的最小夹角;
14、步骤s48,根据最小夹角确定目标物体的最终识别状态。
15、进一步地,从若干检测直线中找出与指针轮廓线相同的真实直线,具体包括:
16、步骤s451,计算若干检测直线与指针轮廓线的第一夹角;根据第一夹角定义权重函数,计算第一夹角权重,根据第一夹角权重筛选预选检测直线;
17、步骤s452,从预选检测直线上选择距离状态坐标点最近的点,并与状态坐标点连接形成状态连接线,计算状态连接线与预选检测直线的第二夹角;
18、步骤s453,将最小所述第二夹角的预选检测直线定义为真实直线。
19、进一步地,计算若干检测直线与指针轮廓线的第一夹角,具体包括:
20、步骤s4511,获取若干检测直线的直线参数,根据直线参数确定检测直线的倾斜角;所述直线参数包括检测直线与指针圆心点坐标的垂直距离、检测直线与水平轴的夹角;
21、步骤s4512,获取指针轮廓线角度;
22、步骤s4513,根据检测直线倾斜角与指针轮廓线角度计算第一夹角。
23、进一步地,所述第一夹角权重的计算,具体包括:
24、获取所有检测直线与指针轮廓线的第一夹角,将第一夹角利用高斯函数转换为0-1范围内的初始权重;
25、从直线参数中获取所有检测直线与指针圆心点坐标的垂直距离,并计算所有检测直线的长度;
26、确定所有检测直线的置信度;
27、根据所有检测直线与圆心坐标点的垂直距离设置预设垂直距离;根据所有检测直线的长度设置预设长度,根据预设长度确定预设最大长度;根据所有检测直线的置信度确定最小置信度;
28、根据初始权重、检测直线与指针圆心点坐标的垂直距离、检测直线的长度、检测直线的置信度、预设垂直距离、预设长度、预设最大长度、最小置信度计算第一夹角权重。
29、进一步地,所述权重函数为:
30、;
31、式中,代表权重函数,theta代表第一夹角,将第一夹角转换为初始权重值,代表标准差参数,代表检测直线与指针圆心点坐标的垂直距离,代表预设垂直距离代表预设垂直距离,l为检测直线的长度,代表预设长度,代表预设最大长度,c代表检测直线的置信度,代表检测直线预设的最小置信度阈值,代表调整系数。
32、进一步地,所述目标物体的最终识别状态包括分合状态和储能状态。
33、本发明还提供基于图像处理的分合及储能指示牌状态识别系统,用于执行基于图像处理的分合及储能指示牌状态识别方法,所述系统包括:
34、预置位图片获取模块:用于获取预置位图片;
35、识别信息获取模块:与预置位图片获取模块连接,用于对预置位图片进行标定,获得状态识别所需的识别信息;
36、目标物体检测处理模块:与识别信息获取模块连接,用于基于状态识别所需的识别信息,利用目标检测模型对预置位图片的目标物体进行检测处理,获取目标物体的目标状态信息、状态坐标点及置信度;
37、状态识别模块:与目标物体检测处理模块连接,用于根据目标状态信息、状态坐标点及置信度,对目标物体的状态进行识别,并输出状态识别结果。
38、本发明实施例具有以下技术效果:
39、1、在指针状态识别的过程中,通过计算检测直线的第一夹角和第二夹角,并结合权重筛选和最小夹角识别状态,这一系列步骤旨在提高识别的准确性和鲁棒性。
40、2、通过计算第一夹角并筛选出接近90°的直线,可以优先考虑与预期角度更匹配的直线,由于指针往往与圆心形成近似垂直的关系,这样可以排除掉很多非指针的干扰直线。
41、3、在实际环境中,图像含有噪声、干扰线条或不相关的视觉元素。通过权重筛选,可以降低噪音的影响,确保只有高质量的、符合预期角度的直线被进一步考虑。
42、4、对预选检测直线计算第二夹角,选取最小夹角的直线作为真实直线,进一步精炼了候选直线,确保最终选择的直线是最有代表真实指针状态的那一条。
43、5、整个过程结合了角度筛选和权重计算,能够有效应对光线变化、图像模糊、指针样式多样等现实世界中的挑战,提高识别系统在各种条件下的稳定性和可靠性,通过多步筛选和角度比较,减少了误将非指针线条识别为指针的可能性,降低了误报率,减少了不必要的计算,提高了识别过程的效率。
本文地址:https://www.jishuxx.com/zhuanli/20240822/277905.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。