一种伴随搭载式隐蔽通信系统的制作方法
- 国知局
- 2024-08-22 14:28:47
本发明涉及无线通信领域,尤其涉及一种伴随搭载式隐蔽通信系统。
背景技术:
1、随着无线通信技术的不断发展,无线通信系统的隐蔽性和安全性越来越受到人们的关注,无线通信系统一般用于军事、商业、民用等领域,其中隐蔽通信系统的应用尤为重要,因为它们可以在不被敌方发现的情况下传输重要信息。
2、经过大量的检索后发现,在现有技术中,传统的信息加密技术和物理层安全技术都无法完全解决隐私问题,因为窃听者可以通过分析窃听的流量数据获取关键的加密信息,而且通信内容容易被截获和破解,这对于军事、政府和商业等领域的信息传输造成了极大的威胁。
技术实现思路
1、为了弥补以上不足,本发明提供了一种伴随搭载式隐蔽通信系统,旨在改善了现有技术中提到的“通信系统存在安全隐患”的问题。
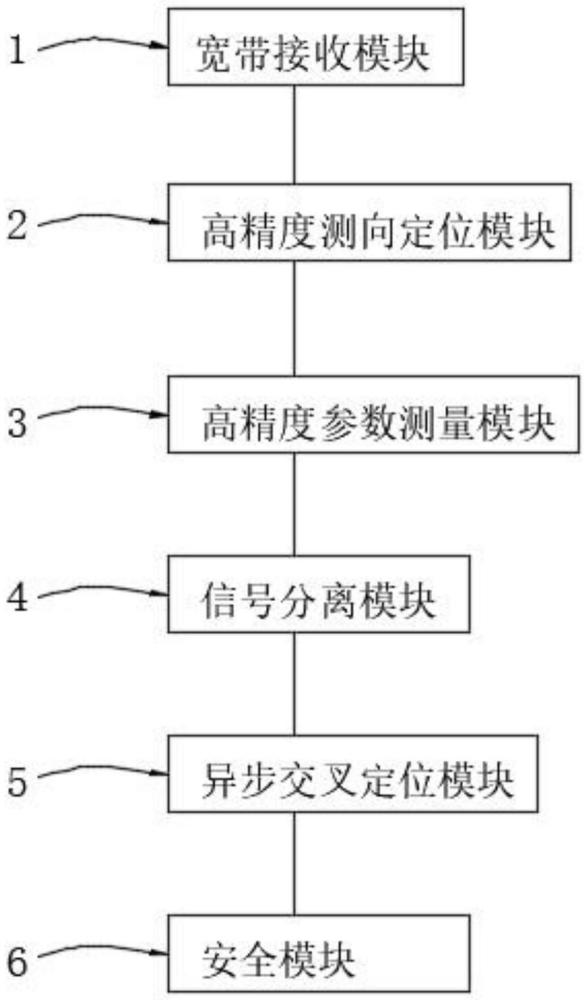
2、为了实现上述目的,本发明采用了如下技术方案:一种伴随搭载式隐蔽通信系统,包括宽带接收模块、高精度测向定位模块、高精度参数测量模块、信号分离模块、异步交叉定位模块以及安全模块,所述宽带接收模块主要用于接收扫描周围环境信号,并根据信号稳定性和阈值选择一种目标信号源作为寄主信号,所述高精度测向定位模块主要用于寄主信号进行测向,所述高精度参数测量模块主要用于对寄主信号进行高精度参数测量,所述信号分离模块主要用于接收到寄主信号和宿客信号之后采用多通道接收并对信号进行分离从而了解调得到宿客信号内容,所述异步交叉定位模块主要用于获取寄主的位置。
3、作为上述技术方案的进一步描述:
4、所述高精度测向定位模块包括特征库单元和相关比幅法解相位差模糊单元以及相关干涉仪测向单元,所述特征库单元用于存储各种信号的特征信息,包括但不仅限于信号的频率、波形、调制方式,以便对接收到的信号进行快速识别和分类,即每个来波方向仅需记录幅度最大的相邻天线编号及其幅度比库和相位差库,其中相位差库还需在不同频率下测量,对于幅度参数,在建立幅度比特征库前需做一次校正补偿天线通道的一致性,即对于同一信号源测出各天线接收信号的最大增益,就其相对大小对各天线接收信号的幅度进行补偿,选出补偿后幅度最大的相邻天线编号,计算相邻天线对的幅度比形成三维向量单元,建立幅度比库,对于相位差参数,仍只选取接收信号幅度最大的相邻天线,测其相邻天线对的相位差形成三维向量单元,建立不同频率下的二维相位差表,由于要保证测向精度,相邻天线间基线一般大于半波长,即相位差存在2pi模糊,所以在建立相位差库时,根据相邻天线对中心附近来波相位差不存在模糊,在获得存在模糊的原始相位差库后,根据相位差变化趋势对其进行解模糊,最终建立无模糊的相位差库,以便于相位差查表测向。
5、作为上述技术方案的进一步描述:
6、所述相关比幅法解相位差模糊单元则利用相关比幅法技术,通过计算接收信号与参考信号之间的相位差,进一步确定信号的方向和位置信息,提高测向定位的精度和稳定性,对于任意来波方向,测量所有天线单元的接收信号幅度,进行幅度补偿后,选出幅度最大的相邻四天线编号及其幅度,求出相邻天线对的幅度比参数,求出实测幅度比向量单元与库中对应天线幅度比向量单元的欧氏距离,公式可参考
7、其中k为各来波方向的编号,n为四天线的最小编号,ank为库中对应天线对各来波方向的幅度比,an为实测幅度比,设最小距离对应波达角度为利用其左右邻点及对应距离通过二次插值估计波达角即
8、其中:
9、将估计所得作为粗测角,求出对应天线对相位差的模糊数,公式可参考:
10、其中[·]表示四舍五入取整,θnc为对应天线对的中心角度,由此可对实测的相位差解模糊。
11、作为上述技术方案的进一步描述:
12、所述选出的天线编号,取出相应天线对的相位差,并根据上一步求出的各相位差模糊数对实测值解模糊,求出解模糊的实测相位差向量单元与库中对应频率下的相位差向量单元的欧氏距离,采用与相关比幅法类似的步骤,找出欧式距离最小的对应角度及其左右邻点,通过二次插值的方法估计波达角,即为最终测向结果。
13、作为上述技术方案的进一步描述:
14、所述高精度参数测量模块对寄主信号的相关数据进行测量,其中包括toa、脉宽pw和脉幅pa,模块在整形脉冲前沿锁存toa计数器数值,以及微分包络信号的前后三个样点,通过内插计算微分包络的正峰值位置,得到脉冲toa的测量值;同样,在整形脉冲后沿锁存toa计数器数值以及微分包络信号的前后三个样点,通过内插计算微分包络的负峰值位置,得到脉冲后沿到达时间,再减去toa得到pw的测量值,在整形脉冲范围内(脉冲两边可适当放大)先对中频信号样点取平方后积累求和,再除以脉宽测量值得到脉内平均功率的估计值,最后对平均功率开平方得到pa的测量值,脉冲包络在前沿和后沿处变化较快,因此对时间取导数后其前沿和后沿呈现尖锐的峰值,根据微分后的波形可以判断脉冲的开始和结束,从而准确地检测脉冲及提取脉内样点,并测量脉冲的起始时间和结束时间;
15、另外,为了适应较低的信噪比,对数字化包络vf求微分时采用最小二乘方法,以多点数据来拟合求取包络的斜率,假设以2n+1个样点数据估计vf’,可参考公式:
16、其中,n的点数应不超过脉冲上升沿的过渡时间,从上述公式可见,微分包络的计算在fpga中可利用fir滤波器来实现,检测包络微分的上升沿并进行内插可以精确估计toa参数,假设vf’峰值的出现时刻为n,则由vf’峰值及其两边样点内插二次项拟合估计脉冲前沿toa如下:
17、
18、其中,ts为采样周期;
19、检测包络微分的下降沿,用同样方法可以测量下降沿时间,再以下降沿时间减去上升沿时间得到脉宽测量值,而对于脉冲幅度,只需对上升沿与下降沿之间的脉冲包络数据取平均即可估计出来。
20、作为上述技术方案的进一步描述:
21、所述信号分离模块基于ica(独立分量分析)的盲信号分离是根据源信号间相互独立性来达到信号分离的目的,快速ica算法是在ica基础上提出的一种快速算法,快速ica算法的优点是能快速收敛,通常基于的判据是负熵最大化,它在一定条件下,将非高斯性作为判断信号独立性的一个依据,非高斯性越强则信号各分量之间越独立,根据信息论原理,在所有具有相同协方差矩阵的分布中,高斯分布的熵最大,负熵以高斯分布为参考,用以描述一个分布与高斯分布之间的偏离程度,也即非高斯性,负熵的定义为:
22、j(y)=hg(y)-h(y)
23、式中h(y)是多路信号y的联合微分熵,而hg(y)是与y具有相同协方差矩阵的高斯分布的微分熵,当j(y)最大时,y的非高斯性最强,y各分量之间的独立性最强,对负熵的表达式作一定的逼近,可以得到下面的判据:
24、j(y)={e[g(y)]-e[g(v)]}2
25、其中函数g(g)是非线性函数,v是服从n(0,1)分布的高斯变量,若独立分离估计y=wtz,w是分离矩阵,z是经过白化后的观测信号,则判据变为
26、j(w)={e[g(wtz)]-e[g(v)]}2
27、在满足w正交的约束条件下,对上式求极大值得到:
28、
29、式中g(g)是g(g)的导数,wi是w的各个分量,随后运用算法估计出分离矩阵w,从而估计出独立分量y。
30、作为上述技术方案的进一步描述:
31、所述异步交叉定位模块为获取寄主的位置,假设2个观测站的位置为(x1,y1)、(x2,y2),目标位置位于(x,y)待求,目标相对于两观测站的方位角分别为θ1和θ2,两条方向的射线可以交于一点,该点即为目标的位置,根据角度定义可得:
32、
33、写成矩阵形式为
34、sθ=f(θ,xo)+ε
35、式中sθ=[θ1θ2]t,为实测角度;θ=[x y]t,为待估目标位置;xo为两观测站位置;ε=[ε1ε2]t为测角噪声;函数f表示反正切计算,显然,该定位模型为非线性系统,不能直接利用最小二乘法求解;
36、但值得注意的是,若忽略噪声,经过简单变换,改写为
37、
38、写成矩阵形式为
39、hθ=s
40、式中:
41、
42、θ为待估参数,h称为观测矩阵,s由已知的观测站位置和对应观测角θ构成,为方便表达,也将之称为观测量,由于双站模型的观测矩阵h为方阵且可逆,所以可直接求得定位结果,如下所示:
43、
44、实际测量过程中,观测角θ存在测量误差,而式中矩阵h与向量s均包含观测角,即二者均包含测角噪声,因此h与s之间具有一定相关性。
45、作为上述技术方案的进一步描述:
46、所述对于非线性系统,如果无法通过参数变换或参数分离实现模型线性化,通常通过迭代的方法去估计相关参数,使其逐渐逼近真实值,迭代算法的基本思想是通过将非线性表达式按泰勒级数展开,保留其中的线性部分,先假定一个待估参数的初始值,然后进行迭代估计,直至求得一个满足某种条件的估计值;
47、高斯牛顿迭代算法是解决非线性最小二乘问题最常用的方法之一,其原理简单,易于实现,且精度较高,测角模型如下
48、
49、其中(xi,yi)为观测站的位置,(x,y)为目标真实位置,θi为实测角度,εi为测角噪声,高斯牛顿迭代法是使非线性模型在某个选取的标称的附近按泰勒级数展开,保留其线性部分,使模型线性化如下
50、
51、写成矩阵形式为
52、aδ=z+e
53、式中:
54、
55、δ为待估定位误差,a为观测矩阵,其构成中fn(n=1,2,...,n)为各站的真实波达角函数表达式,z由各站观测角、站址坐标及初始值构成,为方便表达,也将之称为观测量,e为噪声矢量,然后应用线性最小二乘算法进行定位误差估计,结果如下
56、
57、其中r为一个加权矩阵,可任意选取正定满秩矩阵,一般可取对角矩阵,对角元素为测向噪声方差,由迭代获得定位误差结果后,可依据误差更新定位,即
58、
59、然后依据上述方法重复迭代直至达到设定的最大迭代次数或相邻两次迭代结果充分小,小于设定的门限为止,即为最终定位结果。
60、作为上述技术方案的进一步描述:
61、所述安全模块包括量子密钥生成与分发单元、量子加密通信单元、动态隐蔽性增强单元以及自毁单元,所述量子密钥生成与分发单元搭载式隐蔽通信系统内置量子密钥生成器,能够在系统中自动生成安全的量子密钥,所述量子加密通信单元利用量子密钥对通信内容进行加密,确保信息在传输过程中不被截获或破解,即使敌方设法截获了通信信号,也无法获得原始信息内容,所述动态隐蔽性增强单元搭载式隐蔽通信系统具有动态隐蔽性增强功能,系统可以根据环境变化和敌方行为,自动调整通信方式和参数,以降低被敌方发现、跟踪和破坏的风险,所述自毁单元一旦检测到异常情况或受到敌方破坏,将自动启动自毁程序,销毁存储的数据和密钥,确保信息安全。
62、作为上述技术方案的进一步描述:
63、所述安全模块还包括环境适应性限制单元,所述环境适应性限制单元搭载式隐蔽通信系统需要在各种复杂的环境中运行,其中包括但不仅限于高温、低温、潮湿、干燥的环境下进行工作。
64、本发明具有如下有益效果:
65、1、本发明中,通过利用第三方通用信号源作为寄主信号,大大降低了宿客信号公开传输被截获的概率,可有效解决宿客信号隐蔽传输问题,为未来城市作战、边境巡逻、海上执法维权提供了一种全新的技术支撑,也可以作为反恐维稳、海外信息传输的一种有效选择,通过引入非线性模型的迭代估计方法,特别是高斯牛顿迭代算法,有效提高了定位精度,特别是在观测角存在测量误差的情况下,通过迭代逼近真实值,降低了测角噪声对定位结果的影响。
66、2、本发明中,通过安全模块的设计使得隐蔽通信系统具有更强的安全性和隐蔽性,通过量子密钥生成与分发单元确保了通信密钥的安全性,量子加密通信单元则保证了通信内容在传输过程中的安全性,通过动态隐蔽性增强单元使得系统能够根据环境变化和敌方行为自动调整通信方式和参数,进一步提高了系统的隐蔽性,而自毁单元则能够在系统受到异常情况或敌方破坏时,自动销毁存储的数据和密钥,确保信息安全。
67、3、本发明中,通过环境适应性限制单元使得搭载式隐蔽通信系统能够在各种复杂的环境中运行,无论是高温、低温、潮湿还是干燥的环境,系统都能够稳定工作。
本文地址:https://www.jishuxx.com/zhuanli/20240822/278840.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表