一种超声速二维近地流场壅塞极限马赫数的预测方法
- 国知局
- 2024-08-22 14:36:59
本发明属于超声速地面弹射计算机辅助设计,尤其涉及一种超声速二维近地流场壅塞极限马赫数的预测方法。
背景技术:
1、超声速地面弹射技术是一种低成本、高效费比的飞行器助推发射手段。超声速地面弹射技术将飞行器在地面附近加速至超声速,可以显著减少燃料携带量、大幅提升飞行器运载能力。在飞行器超声速近地飞行流场中会产生激波反射等流动结构,这是超声速近地流动与亚声速近地流动的显著区别。此外,超声速近地流场中还会出现壅塞现象。将飞行器从亚声速加速至超声速或从超声速减速至亚声速的过程中,在一定马赫数附近流场结构会发生显著变化,这个马赫数称为壅塞极限马赫数。当来流速度高于壅塞极限马赫数时,流场为通流状态,反之是壅塞状态。如图2所示,在壅塞状态下,菱形翼型前方出现了一道脱体弓形激波,经弓形激波后,上翼面流动在前缘处即达到声速,并在前缘和最大厚度处分别经过一系列膨胀波加速;但是下翼面流动经过弓形激波后处于亚声速状态,直到翼型最大厚度处才达到声速。同时根据流线可见,此时在翼型前缘仍有部分流动偏向上翼面,产生了溢流现象。在通流状态下,如图3所示,翼型前缘产生两道斜激波作为入射激波。在翼型下方,由于来流为超声速,因此经过斜激波后全部进入翼型与地面之间的区域,没有出现向上翼面溢流的现象;在翼型与地面之间发生了马赫反射现象,形成了典型的三叉激波结构。在壅塞和通流两种状态下翼型气动力存在显著差异,对地面弹射系统和飞行器载荷特性都会产生影响。这是传统飞行器设计中不曾面临的问题,是地面弹射控制系统及飞行器设计中必须考虑的重要问题。
2、目前,关于超声速近地流场壅塞极限问题的研究很少,对流场壅塞极限问题的研究主要集中在进气道领域。对于进气道中的流场壅塞极限问题,存在两种广泛应用的壅塞极限马赫数预测方法,分别是一维等熵压缩极限预测方法和kantrowitz极限预测方法。一维等熵压缩极限预测方法假设来流在压缩段等熵压缩至喉道处并达到声速,此时该压缩段所能通过的流量最大,继续减小来流马赫数即出现壅塞。kantrowitz极限预测方法假设收缩段入口处有一道正激波,来流过正激波变成亚声速,再等熵加速至喉道处并达到声速。超声速近地流场中可能出现马赫反射现象,反射激波和马赫杆后的流动参数不同,在法向上不能假设为均匀流动,存在明显的二维特征。然而,等熵压缩极限和kantrowitz极限都将流场当作准一维流动处理,不能反应近地流场的二维特征,因此将这两种壅塞极限预测方法用于预测超声速近地流场壅塞极限马赫数会存在较大误差。对于超声速二维近地流场,迫切需要一种更准确的壅塞极限马赫数预测方法。
技术实现思路
1、针对现有技术中的不足,本发明提出了一种超声速二维近地流场壅塞极限马赫数的预测方法,所述预测方法将预测壅塞极限马赫数的问题转化为计算反射激波上端恰好位于翼型拐点处时对应的来流马赫数问题,具体技术方案如下:
2、一种超声速二维近地流场壅塞极限马赫数的预测方法,包括以下步骤:
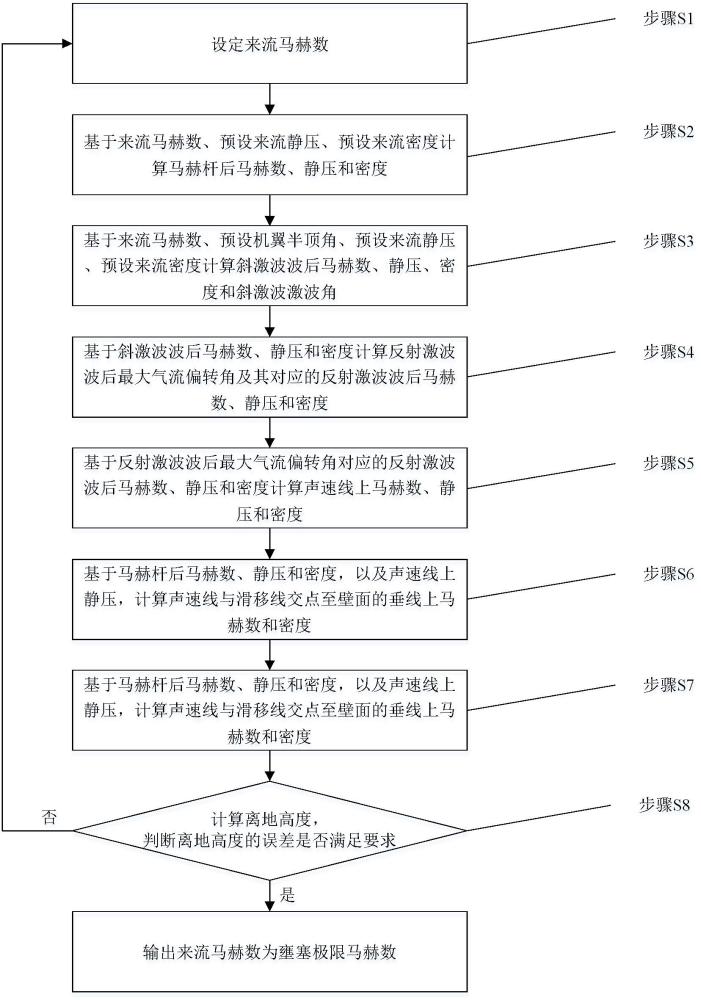
3、步骤s1:设定来流马赫数;
4、步骤s2:基于所述来流马赫数、预设来流静压、预设来流密度计算马赫杆后马赫数、静压和密度;
5、步骤s3:基于所述来流马赫数、预设机翼半顶角、预设来流静压、预设来流密度计算斜激波波后马赫数、静压、密度和斜激波激波角;
6、步骤s4:基于斜激波波后马赫数、静压和密度计算反射激波波后最大气流偏转角及其对应的反射激波波后马赫数、静压和密度;
7、步骤s5:基于反射激波波后最大气流偏转角对应的反射激波波后马赫数、静压和密度计算声速线上马赫数、静压和密度;
8、步骤s6:基于马赫杆后马赫数、静压和密度,以及声速线上静压,计算声速线与滑移线交点至壁面的垂线上马赫数和密度;
9、步骤s7:基于步骤s2-步骤s6的计算结果,得到声速线和垂线的高度;
10、步骤s8:根据声速线高度和垂线高度计算离地高度,并判断计算所得离地高度的误差是否满足要求,若不满足,则返回步骤s1,若满足,则输出所述来流马赫数为壅塞极限马赫数。
11、优选的,所述步骤s2中马赫杆后马赫数、静压和密度的计算方法如下:
12、(1)
13、(2)
14、(3)
15、其中,为设定来流马赫数,为马赫杆后马赫数,为预设来流静压,为马赫杆后静压,为预设来流密度,为马赫杆后密度,为气体比热比。
16、优选的,所述步骤s3中斜激波波后马赫数、静压、密度和斜激波激波角的计算方法如下:
17、(4)
18、(5)
19、(6)
20、(7)
21、其中,为斜激波波后马赫数,为斜激波激波角,为斜激波波后静压力,为斜激波波后密度,为菱形翼型半顶角。
22、优选的,所述步骤s4具体包括:
23、步骤s4-1:根据步骤s3计算得到的斜激波波后马赫数、静压、密度和斜激波激波角,依据式(8)和式(9)计算反射激波波后气流最大偏转角以及对应的反射激波角度;
24、(8)
25、(9)
26、步骤s4-2:依据式(10)、式(11)和式(12)分别计算出反射激波波后最大气流偏转角对应的反射激波波后马赫数、静压和密度;
27、(10)
28、(11)
29、(12)
30、其中,为反射激波波后最大气流偏转角对应的反射激波波后马赫数;为反射激波波后最大气流偏转角对应的反射激波波后静压;为反射激波波后最大气流偏转角对应的反射激波波后密度。
31、优选的,所述步骤s5中声速线上静压和密度的计算方法如下:
32、(13)
33、(14)
34、其中,为声速线上静压;为声速线上密度。
35、优选的,所述步骤s6中声速线与滑移线交点至壁面的垂线上马赫数和密度的计算方法如下:
36、(15)
37、(16)
38、其中,为垂线上马赫数,为垂线上静压,等于,为垂线上密度。
39、优选的,所述步骤s7中声速线和垂线的高度的求解方法如下:
40、(17)
41、(18)
42、(19)
43、其中,为预设来流速度,为斜激波与反射激波之间区域的流体速度,为声速线上流体速度,为垂线上流体速度,为的微元矢量,为的微元矢量,为的微元矢量,为的微元矢量,为反射激波微元法向方向,为声速线微元法向方向,为单元长度,为的矢量,、、分别为马赫杆、反射激波和声速线的长度,为水平方向;
44、联立式(17)、式(18)、式(19)方程求解出马赫杆的长度、声速线高度以及垂线高度。
45、优选的,所述步骤s8中所述离地高度的计算方法如下:
46、(20)
47、其中,为离地高度。
48、相比于现有技术,本发明的有益效果在于:
49、本发明提出的超声速二维近地流场壅塞极限马赫数的预测方法,在已知菱形翼型半顶角以及离地高度的条件下即可准确预测出流场的壅塞极限马赫数。相比于一维等熵压缩极限预测方法和kantrowitz极限预测方法,本发明提出的方法能更好的描述超声速近地流场二维特征,预测得到的超声速近地流场壅塞极限马赫数误差更小。
本文地址:https://www.jishuxx.com/zhuanli/20240822/279251.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表