用于细长手术工具的自动储存设备的制作方法
- 国知局
- 2024-08-22 14:42:52
背景技术:
技术实现思路
1、以下是包括本发明的实施例的一些示例的非排他性列表。本发明还包括在示例中包括少于所有特征的实施例以及使用来自多个示例的特征的实施例,如果没有在下面明确列出的话。
2、示例1.一种用于在机器人设备中使用的细长手术工具的储存设备,所述储存设备包括中空主体,所述中空主体的尺寸和形状适于在该中空主体中储存至少一个细长手术工具;所述主体包括配置成连接到所述机器人设备的近端;所述连接允许所述储存设备的内部空间与所述机器人设备的内部通路连通,从而允许在所述储存设备和所述机器人设备之间来回驱动储存在所述储存设备中的所述细长手术工具。
3、示例2.根据示例1的储存设备,还包括:用于将所述中空主体可逆地连接到所述机器人设备的可选连接器。
4、示例3.根据示例2的储存设备,其中,所述可选连接器是所述储存设备的组成部分。
5、示例4.根据示例2的储存设备,其中,所述可选连接器与所述储存设备和所述细长手术设备一起提供。
6、示例5.根据示例1-4中任一项的储存设备,其中,所述中空主体包括内径,所述内径的尺寸和形状适于除了所述细长手术工具之外还储存一种或多种液体。
7、示例6.根据示例3的储存设备,其中,所述内径包括从约1mm至约6mm的范围。
8、示例7.根据示例1-6中任一项的储存设备,其中,所述中空主体包括螺旋形式。
9、示例8.根据示例1-7中任一项的储存设备,其中,所述中空主体被配置成储存所述细长手术工具,同时避免弯曲和/或损坏所述细长手术工具。
10、示例9.根据示例2的储存设备,其中,所述可选连接器包括一个或多个连接元件,所述连接元件被配置成允许将具有不同外径的储存设备连接到所述机器人设备。
11、示例10.根据示例9的储存设备,其中,所述一个或多个连接元件包括一个或多个直径沿着所述连接器的内壁变窄的同心台阶。
12、示例11.根据示例1-10中任一项的储存设备,其中,所述细长手术工具包括导丝、微导管或两者。
13、示例12.根据示例1-11中任一项的储存设备,其中,所述储存设备包括设置有所述细长手术工具的原始包装。
14、示例13.根据示例1-12中任一项的储存设备,其中,所述储存设备包括袋/包。
15、示例14.根据示例1-13中任一项的储存设备,其中,所述储存设备包括用于从所述机器人设备卷入和卷出所述细长手术工具的卷轴。
16、示例15.根据示例1-14中任一项的储存设备,还包括:用于所述储存设备的机械支撑件。
17、示例16.根据示例15的储存设备,其中,所述机械支撑件是所述储存设备的部件。
18、示例17.根据示例15的储存设备,其中,所述机械支撑件是所述机器人设备的部件。
19、示例18.根据示例1-17中任一项的储存设备,还包括桥接元件,所述桥接元件被配置成在所述储存设备的所述近端和所述机器人设备之间提供几何对准。
20、示例19.根据示例1-18中任一项的储存设备,其中,所述中空主体与所述细长手术工具一样长。
21、示例20.根据示例1-19中任一项的储存设备,其中,所述主体被配置成通过重力从所述机器人设备悬垂并且足够刚以防止损坏所述细长手术工具和/或允许所述细长手术工具的自由运动。
22、示例21.根据示例5的储存设备,其中,所述一种或多种液体是以下中的一种或多种:盐水、水、油和润滑剂。
23、示例22.一种将储存设备用于在机器人设备中使用的细长手术工具的方法,所述方法包括:
24、a.将所述储存设备连接到所述机器人设备;所述储存设备的内部空间与所述机器人设备的内部通路连通;
25、b.将所述细长手术工具的一端馈送到所述机器人设备中;
26、c.致动所述手术设备以移动所述细长手术工具。
27、示例23.根据示例22的方法,还包括:将所述细长手术工具从所述储存设备来回驱动到所述机器人设备,反之亦然。
28、示例24.根据示例22或23的方法,还包括:将所述细长手术工具从第二细长手术工具内的位置自动缩回到所述储存设备中。
29、示例25.根据示例24的方法,自动返回到所述第二细长手术工具内的所述位置。
30、示例26.根据示例22-25中任一项的方法,在所述连接之前,所述方法还包括:从所述细长手术工具的原始包装中取出所述细长手术工具,并且将所述细长手术工具插入到所述储存设备中。
31、示例27.根据示例22-26中任一项的方法,在所述连接之前,所述方法还包括:从所述细长手术工具的原始包装中取出所述细长手术工具,并且在将所述细长手术工具插入到所述储存设备中之前将所述细长手术工具插入到所述机器人设备中。
32、示例28.根据示例22-27中任一项的方法,其中,所述连接包括:将所述细长手术工具的原始包装连接到所述机器人设备,并且利用所述原始包装作为所述储存设备。
33、示例29.根据示例22-28中任一项的方法,还包括:向所述储存设备提供一种或多种液体。
34、示例30.根据示例22-29中任一项的方法,还包括:通过所述储存设备维持所述细长外科设备的湿度、清洁度和无菌度中的一个或多个。
35、示例31.根据示例22-30中任一项的方法,还包括:在所述手术设备的所述致动期间保持所述细长手术工具湿润。
36、示例32.根据示例22-31中任一项的方法,其中,所述馈送在所述连接之前执行。
37、示例33.根据示例22-32中任一项的方法,还包括:在所述致动期间继续向所述储存设备中提供液体。
38、示例34.根据示例22-33中任一项的方法,其中,所述馈送在所述连接之前执行。
39、示例35.一种用于操纵至少一个细长手术工具的系统,包括:
40、a.机器人设备,其被配置成操纵所述至少一个细长手术工具;
41、b.储存设备,其包括中空主体,所述中空主体的尺寸和形状适于将所述至少一个细长手术工具储存在所述储存设备中。
42、示例36.根据示例35的系统,其中,所述主体包括配置成连接到所述机器人设备的近端;所述连接允许所述储存设备的内部空间与所述机器人设备的内部通路连通,从而允许在所述储存设备和所述机器人设备之间来回驱动储存在所述储存设备中的所述细长手术工具。
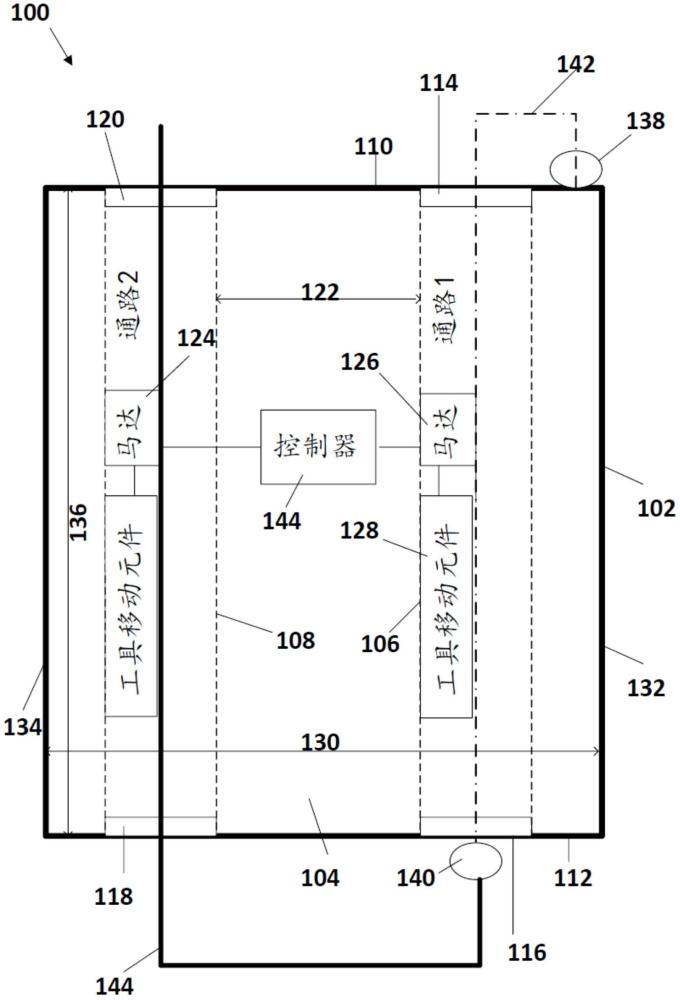
43、示例37.一种用于操纵至少一个细长手术工具的机器人设备,包括:
44、a.壳体,其包括限定内部体积的壁,所述内部体积包含:
45、i.用于接收所述至少一个细长手术工具的至少一个细长通道,所述通道具有将所述至少一个细长工具导入或导出所述壳体的至少一个第一孔;
46、ii.驱动组件,用于当所述至少一个细长手术工具在所述通道内被接收时驱动所述至少一个细长手术工具的线性运动和滚动运动中的一个或两个;
47、b.与所述通道连通的至少一个连接器,所述连接器包括限定第二孔的分支,所述第二孔位于所述壳体的所述壁处或位于所述壳体的所述壁的外部,所述第二孔与所述通道的所述第一孔分离;
48、c.包括中空主体的储存设备,所述中空主体的尺寸和形状适于在该中空主体中储存所述至少一个细长手术工具;所述主体包括配置成连接到所述机器人设备的所述通道的所述第一孔的远端;所述连接允许所述储存设备的内部空间与所述机器人设备的所述通道连通,从而允许在所述储存设备和所述机器人设备之间来回驱动储存在所述储存设备中的所述细长手术工具。
49、示例38.根据示例37的机器人设备,还包括:用于将所述中空主体可逆地连接到所述机器人设备的所述通道的所述第一孔的可选连接器。
50、示例39.一种用于操纵至少一个细长手术工具的机器人设备,包括:
51、a.壳体,其包括限定内部体积的壁,所述内部体积包含:
52、i.用于接收所述至少一个细长手术工具的至少一个细长通道,所述通道具有将所述至少一个细长工具导入或导出所述壳体的至少一个第一孔;
53、ii.驱动组件,用于当所述至少一个细长手术工具在所述通道内被接收时驱动所述至少一个细长手术工具的线性运动和滚动运动中的一个或两个;
54、b.与所述通道连通的至少一个连接器,所述连接器包括限定第二孔的分支,所述第二孔位于所述壳体的所述壁处或位于所述壳体的所述壁的外部,所述第二孔与所述通道的所述第一孔分离;
55、c.用于将储存设备可逆地连接到所述机器人设备的所述通道的所述第一孔的连接器。
56、示例40.根据示例39的机器人设备,其中,所述储存设备包括中空主体,所述中空主体的尺寸和形状适于在该中空主体中储存所述至少一个细长手术工具;所述主体包括配置成连接到所述机器人设备的所述通道的所述第一孔的远端;所述连接允许所述储存设备的内部空间与所述机器人设备的所述通道连通,从而允许在所述储存设备和所述机器人设备之间来回驱动储存在所述储存设备中的所述细长手术工具。
57、示例41.根据示例39的机器人设备,其中,所述储存设备是其中储存所述至少一个细长手术工具的原始包装。
58、示例42.一种用于将储存设备连接到机器人设备的连接器,包括:
59、主体,包括主体近端和主体远端;所述主体近端被配置成接收所述储存设备的远端;所述主体远端被配置成连接到所述机器人设备中的孔。
60、示例43.根据示例42的连接器,其中,所述主体包括一个或多个直径沿所述连接器的内壁变窄的同心台阶。
61、除非另有定义,否则本文使用的所有技术的及/或科学的术语具有与本发明所属领域的普通技术人员通常理解的相同含义。尽管与本文所述的多种方法及多种材料相似或等效的多种方法及多种材料可以用于本发明的多个实施例的所述实践或测试,但多个示例性方法及/或材料在下文描述。如有冲突,以专利说明书(包括多个定义)为准。另外,这些材料、方法及示例仅是说明性的,并不意味着必然是限制性的。
62、本发明多个实施例的所述方法及/或系统的实现可以涉及手动、自动或其组合来执行或完成多个选定的任务。此外,根据本发明的所述方法及/或系统的多个实施例的实际器械及设备,可以使用操作系统通过硬件、软件或韧体或前述的组合来实现数个选定的任务。
63、例如,用于执行根据本发明的多个实施例的多个选定的任务的硬件可以芯片或电路实现。作为软件,根据本发明的多个实施例的多个选定的任务可以由使用任何合适的操作系统的电脑执行的多个软件指令实现。在本发明的示例性实施例中,根据本文所述的方法及/或系统的多个示例性实施例的一个或多个任务由数据处理器执行,例如用于执行多个指令的计算平台。可选地,所述数据处理器包括用于储存多个指令及/或数据的易失性记忆体及/或非易失性存储器,例如,用于储存多个指令及/或数据的磁性硬盘及/或可拆卸的媒介物。可选地,还提供网络连接。可选地,还提供显示器及/或诸如键盘或鼠标器之类的用户输入设备。
本文地址:https://www.jishuxx.com/zhuanli/20240822/279599.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表