一种能够实现自动供土的育秧播种机及其控制方法
- 国知局
- 2024-08-22 14:58:46
本发明涉及农业机械,具体为一种能够实现自动供土的育秧播种机及其控制方法。
背景技术:
1、水稻作为我国至关重要的粮食作物,在国家粮食储备体系中占据核心地位,然而,在我国现代农业的发展进程中,尽管农业机械化取得了显著进步,但农机自动化水平尚存短板,尤其是在作业精度和自动化程度方面仍面临挑战。比如,传统的播种作业流程往往依赖大量的人工参与,劳动强度大且效率受限。
2、针对这一状况,整盘气吸式精密播种机应运而生,这款设备集成了先进的流水线作业系统,能够一站式完成从铺土、压土、精确播种、覆土、喷水到叠盘等一系列育秧工序。具体操作时,播种机流水线一旦启动,育秧盘便会被有序地输送到各个功能区。当育秧盘抵达铺土机构,通过精准的移动定位,将土壤均匀地分布至盘内。随后经过压土环节,确保土壤紧实以利于种子发芽。紧接着来到播种区域,流水线会智能暂停几秒,确保种子得以准确投放。播种完成后,育秧盘移至覆土机构进行细致的覆土处理,以保护好已播下的种子。然后经过喷水装置进行适度水分补充,最后进入叠盘存储区域。
3、然而,值得注意的是,尽管此类播种机实现了多道工序的高度集成化,但在自动化供土环节仍存在改进空间。目前,铺土与覆土机构(为方便描述,以下统称为铺土机构)尚无法实现自动添加土壤,仍需人工频繁铲土填入流水线的铺土料斗中,这一过程耗时耗力且难以保持连续高效的作业节奏。并且依靠人工监控料斗内土壤存量,不仅效率低下,而且由于人为因素的影响,容易出现判断失误或延误添土时机,进而可能导致育秧盘内土壤铺设不均,影响秧苗生长的一致性和整体产量。
4、因此,研发和完善能够自动补给土壤的智能化装置,对于提升整盘气吸式精密播种机乃至我国农业生产的自动化水平具有重要意义。
技术实现思路
1、针对播种机不具备自动供土功能的问题,本发明提供了一种能够实现自动供土的育秧播种机及其控制方法,利用称重传感器实时监测铺土料斗内的剩余土量,并通过控制器驱动加土装置向铺土料斗内加土,以此来实现自动供土的目的,提高播种机的自动化水平。
2、本发明是通过以下技术手段实现上述技术目的的。
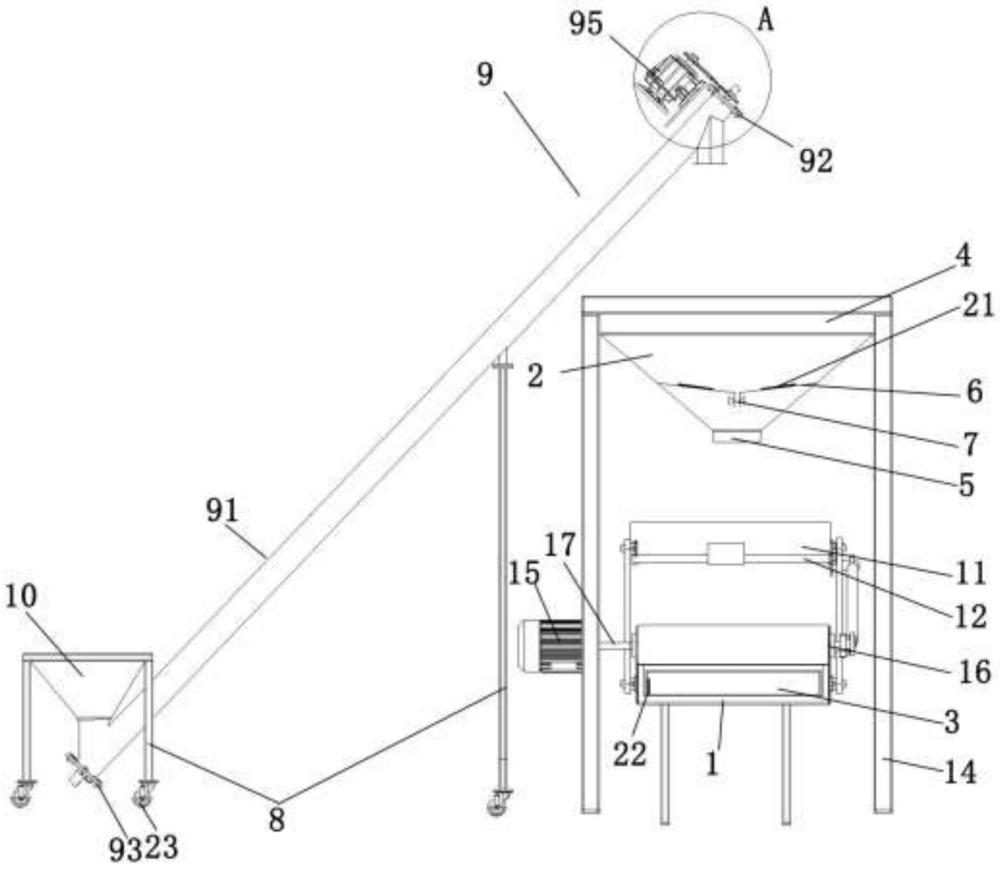
3、一种能够实现自动供土的育秧播种机,其特征在于,包括位于育秧流水线上方的铺土料斗、用于向铺土料斗中添加土壤的加土装置、位于铺土料斗与育秧盘之间的筛土部件,以及控制系统;所述育秧流水线用于承载、输送育秧盘;
4、所述铺土料斗的上下端分别开设有进料口与出料口,铺土料斗内设有用于装载土壤的倾斜底板,倾斜底板的中部设有阀门;
5、所述加土装置包括螺旋输送机和装土料斗;所述螺旋输送机的入口与装土料斗的下料口对接,螺旋输送机的出口位于铺土料斗的进料口上方;
6、所述筛土部件包括抖动筛土盘、栅板、电动推杆和驱动装置;所述抖动筛土盘为上端开口的箱式结构,抖动筛土盘的底面上开设有若干个与育秧盘内的秧穴位置一一对应、呈横纵交织排列的通孔;所述栅板紧密贴附于抖动筛土盘底部、且安装在抖动筛土盘底面上的滑槽中,所述电动推杆的两端分别与抖动筛土盘、栅板固定连接,当电动推杆在伸缩两个状态切换时,能够使栅板上的栅条、缝隙分别与抖动筛土盘上的通孔重叠;所述驱动装置包括驱动电机、安装座、传动轴、偏心轮、连杆和若干摇杆;所述安装座固定在育秧流水线上;所述传动轴与驱动电机的输出轴固定连接、且通过轴承安装在安装座上,传动轴的自由端与偏心轮的圆心处固定连接,所述连杆的一端与偏心轮偏心连接、另一端与抖动筛土盘铰接;所述抖动筛土盘通过若干摇杆安装在育秧流水线的上方,且摇杆与育秧流水线、抖动筛土盘之间为铰接;
7、所述控制系统包括控制器、安装在倾斜底板上的称重传感器、安装在育秧盘上的位置传感器,称重传感器、位置传感器、驱动电机、阀门控制开关、电动推杆、螺旋输送机的动力装置均与控制器连接,所述称重传感器用于实时采集铺土料斗中的土壤重量值,位置传感器用于检测育秧盘的位置;所述控制器根据称重传感器检测的重量值来控制螺旋输送机的工作,以及根据位置传感器检测的育秧盘的位置信息来控制阀门控制开关、驱动电机和电动推杆的工作。
8、进一步地,所述螺旋输送机包括壳体、上端盖、下端盖、螺旋输送轴和减速电机;所述上端盖、下端盖分别与壳体的上、下端面法兰连接;所述螺旋输送轴位于壳体内,并通过轴承转动连接在上端盖与下端盖上,螺旋输送轴上设有螺旋叶片,螺旋输送轴靠近减速电机的一端上设有从动齿轮,所述减速电机的输出轴上设有主动齿轮,所述主动齿轮通过传动链条与从动齿轮传动连接。
9、进一步地,所述称重传感器的数量不少于2个且对称安装在倾斜底板上。
10、进一步地,所述电动推杆的推拉力方向与栅板在滑槽中的移动方向及育秧盘在育秧流水线上的移动方向平行。
11、进一步地,所述抖动筛土盘上的通孔孔径小于育秧盘内的秧穴孔径。
12、进一步地,所述机架底部固定有若干个带刹车的万向轮。
13、进一步地,所述铺土料斗和驱动电机均安装在支架上;所述螺旋输送机和装土料斗均由机架固定支撑。
14、基于以上任一项所述育秧播种机的控制方法,其特征在于,包括对加土装置及筛土部件的控制方法,其中对加土装置的控制方法,包括以下步骤:
15、s1:在开始工作前先测试当铺土料斗中装满土壤时称重传感器所对应的电信号值g0,以及当铺土料斗中的土壤减少到阈值所对应的电信号值g1;
16、s2:开始工作,称重传感器实时采集铺土料斗中的土壤重量值,将得到的重量值信号转换为电信号值g,随后将电信号值g输出给控制器;
17、s3:控制器将接收到的电信号值g与设定电信号值g1进行对比,当g≤g1时,控制器发送控制信号以启动螺旋输送机,利用驱动螺旋输送机将装土料斗内的土壤输送到铺土料斗中;在自动供土阶段,控制器将接收到的电信号值g与设定电信号值g0进行对比,在电信号值g≥g0时关闭减速电机,随后重复步骤s2;
18、对筛土部件的控制方法,包括以下步骤:
19、m1:开始工作前,控制器驱动电动推杆将栅板推至能够封住抖动筛土盘上所有通孔的位置;
20、m2:开始工作后,控制器开启阀门控制开关使得土壤落入抖动筛土盘上,随后关闭阀门控制开关并启动驱动电机,通过抖动筛土盘的晃动使得土壤均匀分散在若干通孔内;同时位置传感器实时采集育秧盘的位置信息,并将其发送给控制器;
21、m3:当育秧盘移动至抖动筛土盘下方的对应位置处时控制器暂停育秧流水线运行,接着驱动电动推杆将栅板推至能够暴露出抖动筛土盘上所有通孔的位置,待通孔内的土壤全部投入到育秧盘内对应的秧穴中后利用电动推杆将栅板复位,重启育秧流水线并重复步骤m2。
22、进一步地,从开启电磁开关到土壤均匀分散在若干通孔内所需的时间不超过上一次加土工作结束至下一个育秧盘移动至抖动筛土盘下方的对应位置处所需的时间;所述控制器控制驱动电机输出轴转动的圈数为整数。
23、进一步地,当称重传感器的数量不少于2个时,需要采用卡尔曼滤波融合算法将得到的多个重量值信号进行融合后得到融合信号,并将融合信号转换为电信号值g后输出给控制器。
24、本发明的有益效果如下:
25、1.本发明通过设置若干称重传感器实时采集铺土料斗中的营养土重量值,并将多个称重传感器采集的数值进行融合后得到的融合信号发送给控制器,控制器以电信号的大小为评判标准,识别出加土料斗内的土含量,并进行相应的指令操作。不仅避免了人工观测误差,提高了监测效率,而且提高了装置的自动化和智能化水平。
26、2.本发明利用抖动筛土盘,将土均匀铺在育秧盘的秧穴内,确保每个秧穴内都有适量且疏松的营养土,相较于传统的移动式铺土,秧穴内土壤分布均匀能够使得秧苗生长更为整齐划一,有利于后期机械化插秧操作,提高插秧质量和田间管理水平,进一步保障稻田的高产稳产。
本文地址:https://www.jishuxx.com/zhuanli/20240822/280669.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表