一种基于数据处理的除尘监测控制方法及系统与流程
- 国知局
- 2024-08-22 15:08:17
本发明涉及数据处理领域。更具体地,本发明涉及一种基于数据处理的除尘监测控制方法及系统。
背景技术:
1、粉尘是指悬浮在空气中的固体颗粒,是保持地球温度的主要原因之一。在生活和生产中,生产性粉尘是人类健康的天敌,是诱发多种疾病的主要原因之一。尤其是煤矿粉尘,一方面严重危害工人的身体健康,致使工人患尘肺病,另一方面过高浓度的粉尘还潜伏着爆炸的危险。因此,在生产区域需要严格把控粉尘的浓度,以减少粉尘浓度过高而造成的危害。
2、公开号为cn112067516a的中国专利申请文件公开了一种粉尘浓度智能视频传感器和粉尘浓度检测方法,该专利申请文件通过激光散射原理高精度地检测粉尘浓度,同时通过环境的视频图像数据,实时、精确地监测和显示环境中的粉尘浓度。但是,由于激光散射传感器的检测范围有限,得到的数据主要反映的是检测装置周围一定范围内的粉尘浓度。因此,如果需要检测粉尘浓度的环境较大,且环境中的粉尘浓度在空间上有显著变化,那么距离传感器较远的区域的粉尘浓度可能无法准确反映在检测数据中。从而使得检测数据可能无法准确反映检测环境中粉尘浓度的整体水平。
3、基于此,目前亟需解决的是无法准确的判断环境中粉尘浓度的整体水平。
技术实现思路
1、本发明提供一种基于数据处理的除尘监测控制方法,旨在解决相关技术中在一些情况下,无法准确的判断环境中粉尘浓度的整体水平的问题。
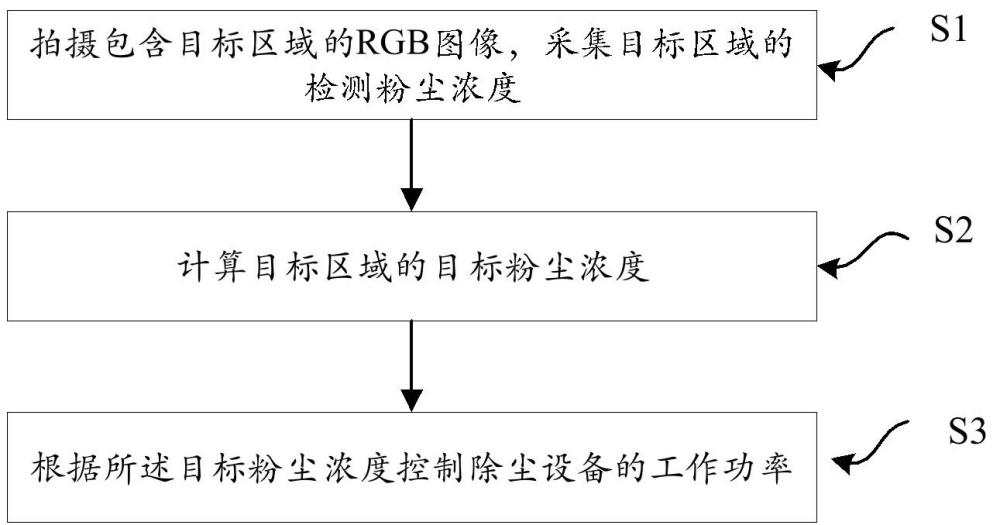
2、在第一方面中,本发明提供了基于数据处理的除尘监测控制方法。拍摄包含目标区域的rgb图像,采集目标区域的检测粉尘浓度w;计算目标区域的目标粉尘浓度z,, hv为最小矩阵中第 v个元素的尘雾量, u为最小矩阵中元素的数量;通过对最小矩阵中对应目标区域的元素的尘雾量求平均得到, norm()为归一化函数;其中,所述最小矩阵任一个元素等于所述rgb图像的r、g或b的通道矩阵中同一坐标处的像素值中的最小值;将所述最小矩阵进行分块得到不少于一个子块,任一子块的尘雾概率与该子块中所有元素的均值成正比,与该子块中最大元素和最小元素之间的差的绝对值成反比;对于任一子块,根据尘雾概率计算影响度,其中影响度还与该子块中最大元素连接到最小元素的线段所经过的目标元素在所述线段上的变化有关;对于任一子块中的任一元素,获得该元素与最大元素的第一距离,以与最大元素之间的距离最接近第一距离的目标元素为该元素的相似元素;根据任一元素和其相似元素的尘雾量,计算最小矩阵中任一元素的尘雾量;根据所述目标粉尘浓度控制除尘设备的工作功率。
3、本发明的有益效果为:
4、本发明通过获得除尘区域的rgb图像,得到rgb图像对应的最小通道矩阵,并通过对最小矩阵中各元素的值进行计算,得到各元素的尘雾量。最小矩阵中任一个元素的尘雾量越大,说明rgb图像中对应的像素所对应的除尘区域中尘雾浓度越大,因此本发明通过对各元素的尘雾量对传感器检测得到的检测尘雾浓度进行修正,得到目标尘雾浓度,使得目标尘雾浓度更准确的表达整个除尘区域的尘雾含量以及尘雾浓度,避免了除尘区域中某些区域距离传感器较远,且尘雾浓度较高而使传感器的检测数据不准确。
5、在一个实施例中,计算所述子块的尘雾概率的公式为:
6、;
7、其中,对于最小矩阵中的第 i个子块, ci为子块的尘雾概率, ai为子块中所有元素的平均值, bmax为子块中最大元素的值, bmin为子块中最小元素的值,max函数用于返回和1中的最大值。
8、发明通过获得子块中最大元素和最小元素之间的差与子块中元素的平均值计算子受尘雾影响的概率,最大元素和最小元素之间的差越小,则子块受尘雾影响的概率越大。原因为:由于尘雾浓度通常在平面空间上的表现为近似或平缓均匀的变化,rgb图像不会出现一像素点位置特别浓的尘雾旁边相邻像素点的尘雾特别淡的情况,而rgb图像中像素点被烟雾影响的程度越大,像素点之间会近似,且对应的子块中的元素会越近似,元素之间的差越小。再者,通过max函数返回和1中的最大值可以避免因的数值太小而导致尘雾概率 ci所达到的最大值过大,从而使大于1时对归一化后的值因为均较小而失去参考价值的情况。
9、在一个实施例中,基于数据处理的除尘监测控制方法还包括以子块中目标元素以外的其余元素为参考元素,根据所述参考元素对子块的影响度修正;计算所述影响度的公式为:
10、,,;其中,对于最小矩阵中的第 i个子块, gi为影响度, ci为尘雾概率, di为最大元素与最小元素之间的距离,以最大元素到最小元素的方向为线段方向, ei,j-1为线段方向上第 j-1个目标元素, ei,j为目标元素在线段方向上第 j个目标元素, ei,j+1为线段方向上第 j+1个目标元素, n为目标元素的数量, ei,t为第 t个参考元素,为第 t个参考元素在线段方向上相邻的元素, l为所有元素的数量, t、 j均为求和变量, xi为第一影响系数, yi为第二影响系数。
11、本发明通过子块中连接了最大元素和最小元素的线段上目标元素的变化趋势以及不属于目标元素的参考元素的在最大元素到最小元素的方向上的变化趋势计算该子块对应的rgb图像被尘雾影响的程度,避免了在一个子块对应区域本身颜色相同的情况下,该子块对应区域的尘雾浓度较小,但是子块的尘雾概率仍然较大的情况。
12、在一个实施例中,计算子块中元素的尘雾量的公式为:
13、;
14、其中,对于最小矩阵中的第 i个子块, hip为该子块中第 p个元素的尘雾量, gi为该子块的影响度, eip为第 p个元素的值,为第 p个元素的相似元素的值, ripq为与所述第 p个元素相邻的第 q个元素的值,为与所述第 p个元素相邻的第 q个元素的相似元素的值, m为与所述第 p个元素相邻的元素的个数。
15、在一个实施例中,对于任一子块中的任一元素,确定该元素的相似元素包括:获得该元素与子块中最大元素的第一距离;获得子块中最大元素与子块中所有目标元素的第二距离;计算第一距离与第二距离的差的绝对值;对于子块中的所有目标元素,以最小的绝对值对应的目标元素为该元素的相似元素。
16、在一个实施例中,所述根据所述目标粉尘浓度控制除尘设备的工作功率包括:响应于目标粉尘浓度小于第一阈值,使除尘设备不工作;响应于目标粉尘浓度大于第一阈值且小于第二阈值,使除尘设备以额定功率的 a%进行工作,其中, a为定值,且0< a<100;响应于目标粉尘浓度大于第二阈值且小于第三阈值,使除尘设备以额定功率的 b%进行工作,其中, b为定值,且 a< b<100;响应于目标粉尘浓度大于第三阈值,使除尘设备以额定功率进行工作。
17、本发明根据目标除尘浓度的大小使除尘设备以不同的功率运行。其中,目标粉尘浓度越高,说明除尘区域中越需要进行除尘处理。基于此,在除尘区域中需要进行除尘的程度较小时,使除尘设备以较小的功率运行,以节省能源;在除尘区域中需要进行除尘的程度较大时,使除尘设备以较大的功率运行,以避免尘雾浓度过高造成危害。
18、在一个实施例中,构建最小矩阵包括:获得除尘区域图像,其中,所述除尘区域图像为rgb图像;获得所述除尘区域图像的r通道图像、g通道图像和b通道图像;获得r通道图像的矩阵,记为r的通道矩阵;获得g通道图像的矩阵,记为g的通道矩阵;获得b的通道矩阵,记为b的通道矩阵;对于最小矩阵中的任一坐标,获得确定该处的元素的值为r、g或b通道的矩阵中同一坐标处的像素值中的最小值。
19、在一个实施例中,确定目标区域包括:获得除尘区域图像中传感器中心的坐标;以传感器中心的坐标为预设形状的中心,并确定所述预设形状所包围的图像为目标区域。
20、本发明通过使传感器检测得到的尘雾代表预定范围内区域,增加了尘雾传感器检测数据的准确性,避免了距离尘雾传感器较远区域与尘雾传感器检测数据差异较大而导致计算结果失真的情况。
21、第二个方面中,本发明提供了基于数据处理的除尘监测控制系统。该系统包括处理器和存储器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序以实现上述技术实现要素:中任一项所述的基于数据处理的除尘监测控制方法。
22、本发明的有益效果为:本发明通过通过获取包括目标区域的rgb图像,并使传感器检测浓度代表相比于rgb中除尘区域较小的目标区域的浓度,使传感器检测数据更准确,之后计算最小通道矩阵中各元素的尘雾量,修正传感器检测得到的尘雾浓度,使得目标尘雾浓度更准确地表达整个除尘区域的尘雾含量和浓度。同时根据目标尘雾浓度对除尘设备进行控制,避免除尘区域浓度较高造成危害并节约能源。
本文地址:https://www.jishuxx.com/zhuanli/20240822/281326.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表