肌电传感与屏显联合控制的软体足底筋膜按摩康复装置
- 国知局
- 2024-08-30 14:25:18
本发明属于足部康复,具体涉及一种肌电传感与屏显联合控制的软体足底筋膜按摩康复装置。
背景技术:
1、足底筋膜炎是常见足部疾病,常由高强度或不规范运动引发,导致足底筋膜受损,产生剧痛和行动不便。传统治疗如人力治疗昂贵,简易器具则效果有限且存安全隐患。因此,足底筋膜按摩康复机的出现具有重要意义。它结合人体工程学,通过精确编程提供个性化康复按摩,促进恢复、减轻疼痛,提高生活质量。
2、与传统方法相比,康复机具有操作可控、安全避免二次伤害和节省人力成本的优势。市场上虽有足底按摩装置,但多数质量重、昂贵且无法进行针对性康复。因此,开发专门辅助足底筋膜康复的机器至关重要。
技术实现思路
1、本发明的目的在于克服传统技术中存在的上述问题,提供一种肌电传感与屏显联合控制的软体足底筋膜按摩康复装置。
2、为实现上述技术目的,达到上述技术效果,本发明是通过以下技术方案实现:
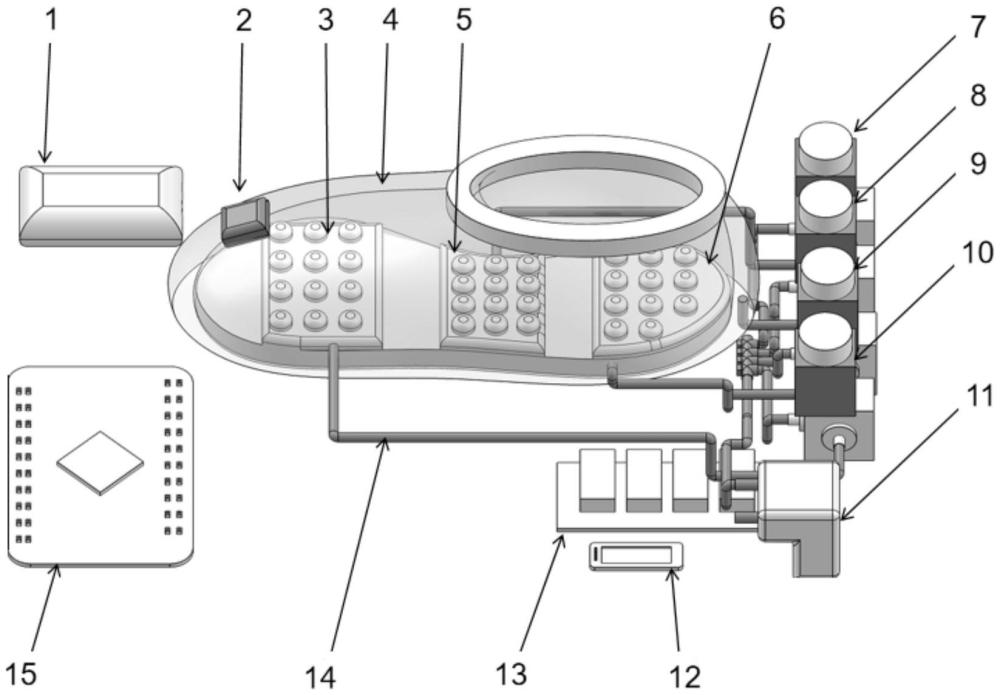
3、本发明提供一种肌电传感与屏显联合控制的软体足底筋膜按摩康复装置,包括脚底板按摩气动单元、足底关节康复运动单元、含肌电信号感受器固定单元、上位机控制单元以及外壳,所述上位机控制单元包括上位机处理器和上位机显示屏,所述上位机控制单元主要用于设定脚底板按摩气动单元、足底关节康复运动单元的运动幅度和频率,并且能够进行脚底板康复按摩与脚部关节康复按摩模式切换,并且通过上位机处理器在上位机显示屏上进行直观的机器运动数据表达。
4、进一步地,上述肌电传感与屏显联合控制的软体足底筋膜按摩康复装置中,所述脚底板按摩气动单元包括特制气囊、脚承重板、气管、螺栓螺母连接件、小型气泵、继电器、电磁阀、电源;其中特制气囊分为四大块包括脚固定气囊,底部由内部气囊:气囊a1与气囊a2和气囊a3构成,气囊a1安装在脚的前跖区、气囊a2安装在脚的外侧区与跖弓区、气囊a3则安装足根区,四个气囊彼此充气独立,四个气囊由四条硫化管连接四个电磁阀的输出口,四个电磁阀的进口处由一根气管连接气泵出口气管,电磁阀电路由继电器与电源连接为通路,继电器由mega2560进行控制,气泵线路连接脉冲发射器同样由mega2560进行控制;整体气囊搭在承重板上。
5、进一步地,上述肌电传感与屏显联合控制的软体足底筋膜按摩康复装置中,所述脚底板按摩气动单元的三个小型独立气囊与脚底板接触部分含有树脂凸起。
6、进一步地,上述肌电传感与屏显联合控制的软体足底筋膜按摩康复装置中,脚底板按摩气动单元的整体气囊充气后呈仿鞋状,仿鞋状气囊分内外双层,每层厚度为1mm;气囊通过6mm硫化管道与各个气路元器件连接,其余安装在脚支撑板的部件通过魔术贴与胶水进行粘贴连接,固定支架安装板与外罩。
7、进一步地,上述肌电传感与屏显联合控制的软体足底筋膜按摩康复装置中,所述足底关节康复运动单元由小型气囊、小型气泵、电源、mega2560和陀螺仪组成,其中电源、mega2560与脚底板按摩气动单元共用,小型气囊共有四个且安装在支撑板下方的前后左右四个方位,四个小型气囊通过四个硫化管与四个电磁阀的出气口相连,四个电磁阀进气口与气泵的输气口相连组成气路,电磁阀由mega2560进行控制。
8、进一步地,上述肌电传感与屏显联合控制的软体足底筋膜按摩康复装置中,所述足底关节康复运动单元通过控制脚的运动,配合上位机控制单元实现调节运动的模式、频度、幅度,并且能够实时观察上位机显示屏显示的机器运动数据。
9、进一步地,上述肌电传感与屏显联合控制的软体足底筋膜按摩康复装置中,所述含肌电信号感受器固定单元包含树脂固定软环、树脂固定松紧器、棉布贴纸和魔术贴,所述树脂固定松紧器在外侧、魔布贴纸在外侧搭载在外壳圆口处由螺栓螺母进行固定,内部加入肌电信号感受器,肌电信号感受器进行检测人体小腿腓肠肌与比目鱼肌肉的信号强度,然后将信号传送给mega2560进行信号处理,通过数据处理后来进行驱动脚部关节进行相应的运动。
10、进一步地,上述肌电传感与屏显联合控制的软体足底筋膜按摩康复装置中,所述上位机显示屏与mega2560相连,mega2560作为上位机处理器,所述上位机显示屏通过螺栓螺母固定在外壳所设定的位置;所述外壳与外壳上板采用树脂3d打印,厚度为3mm,所述外壳上设有上位机安装槽口、脚固定装置安装槽口。
11、进一步地,上述肌电传感与屏显联合控制的软体足底筋膜按摩康复装置中,两个所述肌电信号感受器安装在小腿固定装置对应人腿的比目鱼肌与腓肠肌上,小腿固定装置内部应用海绵垫进行填装,增加舒适性。
12、进一步地,上述肌电传感与屏显联合控制的软体足底筋膜按摩康复装置中,电源为多种输出锂电池,可输出5v/9/v12v电压,其中9v电压供给mega2560控制板、5v上位机显示器、陀螺仪、12v电压供给气泵、继电器输入部分、脉冲发射器输出部分、12v电磁阀与继电器的输出部分与电磁阀相连,mega2560的2、3、4、5引脚与四路继电器的四条信号线相连,6、7、8、9引脚与电磁阀的电源线正极相连,负极则与控制板的gnd相连,陀螺仪信号线连接mega2560上的10、11、12引脚;脉冲发射器的rx与tx线与mega2560的tx1、rx1相连,其pwm线与对应的气泵的pwm线进行相连,上位机显示屏幕电源由电源电池供给,tx、rx线路与mega2560的rx3、tx3相连,编写上位机程序,设置双控开关与数据处理显示图像,通过双空开关来启动机器,并将数据给mega2560来发送给pwm脉冲发射器,并控制继电器随时间进行闭合断开,pwm脉冲发射器按照使用者设定的占空比与频率驱动气泵a进行工作;脚部关节康复结构的两个肌电信号感受器的信号线与电源线与mega2560接口线相连,5v电磁阀的电源线正极与mega2560的13、14、15、16引脚相连,电源线负极与mega2560的gnd引脚相连,陀螺仪实时发送位置数据信号给mega2560,达到预定高度时,气泵b停止排气,使机器进行下一步动作或停止,从而精准实现按摩效果。
13、本发明的有益效果是:
14、1、本发明提供一种肌电传感与屏显联合控制的软体足底筋膜按摩康复装置,该装置结合了气动按摩与关节康复运动结构,通过精心设计的气动回路,实现了对气囊的精确充气与变形,从而为用户提供个性化的脚底板按摩体验。在按摩过程中,整体气囊首先充气以固定脚部,待机器停止后,仿鞋状气囊才进行排气,而其他三个气囊则按顺序进行进气与排气,以达到有效的按摩效果。
15、2、本发明装置的足底关节康复系统通过顶动支撑板的运动,模拟人体关节的不同运动特性;用户或医生可通过上位机向控制板发出指令,实现不同程度和类型的康复训练,以满足个性化的康复需求。本发明装置完全由气体驱动,动作幅度的参数可根据用户自身需求或医生建议进行灵活设定。为了确保机器运动与用户输入幅度一致,装置还加入了陀螺仪反馈机制,实时检测数据并传送给mega2560板进行精准控制。
16、3、为了提供更好的使用体验,本发明装置还设计了专门的外壳,用于承装各个系统,并预留了相应的孔与槽以便安装各个系统结构。同时,结合人体脚部的固定装置,外壳与固定装置的配合确保了用户在使用产品时脚部的整体位姿符合人体工程学与康复医学的要求。在脚部关节康复结构中。
17、4、本发明创新地采用了肌电信号作为控制机器运动的主要方式,通过实时监测和分析肌电信号,装置能够精准地控制机器的运动,以实现更加自然和有效的康复训练。同时,结合陀螺仪作为数据检测装置,装置能够在康复运动中实时监测并调整运动角度,确保不会超过用户在上位机中设定的运动度数幅值,从而确保康复过程的安全性和有效性。
18、当然,实施本发明的任一产品并不一定需要同时达到以上的所有优点。
本文地址:https://www.jishuxx.com/zhuanli/20240830/281916.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表