一种间隔环自动运送和回收装置
- 国知局
- 2024-08-30 14:27:56
本发明涉及电缆作业机器人,具体涉及一种间隔环自动运送和回收装置。
背景技术:
1、高压输电线路是保障城市电力能源供给的重要环节。输电线路架设的环境较为复杂,如山地、沙丘、交通干线等附近,一旦有大风天气出现,这部分输电线路则会直接在风载荷的作用下发生低频、大幅的摇摆,称为“舞动”。这类现象在海拔较低、气压较高的区域尤其明显。在这些区域,导线在大气中的比重相对较高,从而使得风易推动导线上下运动,为舞动创造条件。由于现有的户外输电线路大多没有绝缘层,舞动可使导线相间距离缩短或碰撞而产生闪络烧伤导线,并引起跳闸。一旦由于风灾导致输电线路故障的发生,则很难在短时间内得到解决,会导致故障造成的损失不断扩大。
2、目前已有的解决电缆舞动碰撞的绝缘方法是在线缆外侧涂覆绝缘材料。针对绝缘材料涂覆方案存在的两个明显问题,(1)绝缘层在涂覆时容易存在不均或破损,时间长后容易老化开裂,且不易修复,这些情况均会影响绝缘性能。(2)为了保证绝缘性,绝缘材料通常具有一定厚度,必然带来不小的总重量。通常已经架设好的高压线缆支撑电塔的承重有限,增加线缆总重量会有极大的安全隐患,甚至可能导致倒塌、断裂等事故。因此,亟需寻求一种可行的替代方案。为此,提出了一种在易产生舞动的高压输电线路上加装轻质高强度的绝缘间隔环的方案,现有的间隔环安装机器人仅能满足单次安装一个间隔环的作业任务要求,每次完成安装后,需要返回初始地点,由人力装载下一个间隔环,再进行下次安装。且间隔环到达使用寿命后,单用机器人拆除则无法回收,间隔环会从高空掉落损坏或丢失,或落入无法拾取的区域,作业的方案效率较低、成本较高。
技术实现思路
1、1.所要解决的技术问题:
2、针对上述技术问题,本发明提供一种间隔环自动运送和回收装置。
3、2.技术方案:
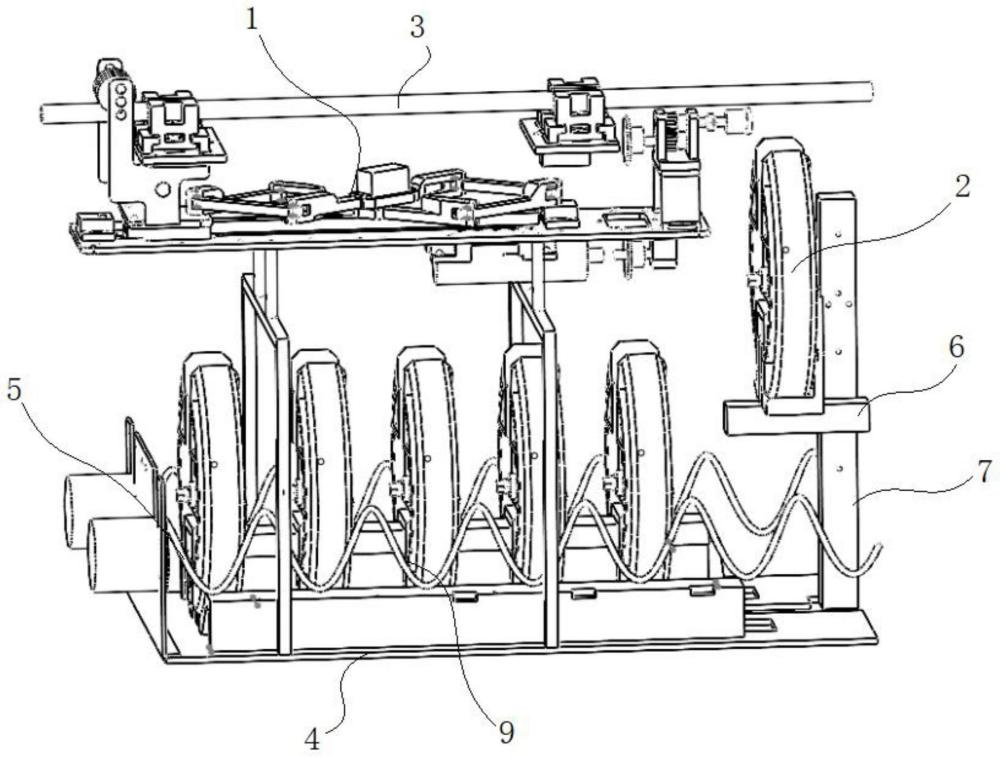
4、一种间隔环自动运送和回收装置,安装在间隔环作业机器人的下方,间隔环作业机器人能够在电缆上行进并安装间隔环,间隔环由外部的环形绝缘壳和内部的锁紧机构组成,间隔环通过锁紧机构能够锁紧在电缆上;所述间隔环自动运送和回收装置包括固定在间隔环作业机器人上并随其同步行进的第一机体,第一机体上设有间隔环输送机构、水平直线滑台和垂直直线滑台,所述间隔环输送机构包括设置在第一机体上的t型导轨以及推动间隔环沿t型导轨滑动的推送机构,间隔环上设有滑动连接t型导轨的t型滑槽,水平直线滑台上设有用于支撑间隔环的托槽组件,托槽组件能够水平移动,托槽组件设置在t型导轨的末端,托槽组件远离t型导轨的一侧固定有背板,背板上设有卡块,卡块承接在t型导轨的末端并且能够卡入间隔环的t型滑槽内,背板上固定有电磁铁,间隔环上设有对应电磁铁的铁片,水平直线滑台连接垂直直线滑台,水平直线滑台由垂直直线滑台带动上下升降。
5、进一步地,所述推送机构包括平行设置在t型导轨两侧的第一旋进弹簧和第二旋进弹簧,第一旋进弹簧的下方设有第一托轨,第二旋进弹簧的下方设有第二托轨,第一托轨和第二托轨固定在第一机体顶部,用于承托间隔环;间隔环放置在第一旋进弹簧和第二旋进弹簧之间的螺旋间隔内,第一旋进弹簧固定连接第一电机的活动端,第二旋进弹簧固定连接第二电机的活动端。
6、进一步地,所述托槽组件包括两个对称设置的托板,托板固定在底板上,两个托板相靠近的一侧为配合间隔环设置的弧面,间隔环放置在两个托板之间。
7、进一步地,所述锁紧机构包括壳体,环形绝缘壳固定在壳体外侧并将壳体包裹其中,壳体的顶部设有电缆穿插槽,间隔环顶部预留有供电缆穿过并进入电缆穿插槽的间隙,电缆穿插槽两侧对称地设有两个限位滑槽,限位滑槽内滑动连接有压块,两个压块相远离的一侧端部均设有螺纹孔,螺纹孔内螺纹连接有螺杆,螺杆转动连接在壳体上,螺杆连接齿轮传动结构。
8、进一步地,所述齿轮传动结构包括固定连接螺杆的第一直齿轮,第一直齿轮啮合第二直齿轮,第二直齿轮通过第一连接轴固定连接第一锥齿轮,两个第一锥齿轮啮合同一个第二锥齿轮,第二锥齿轮固定连接异形驱动轴,异形驱动轴转动连接壳体。
9、进一步地,所述间隔环作业机器人包括底座和输出轴套,输出轴套的中心设有能够与锁紧机构的异形驱动轴相配合的异形槽,异形槽内设有滑动连接的异形轴头,异形轴头固定连接转轴,转轴伸出输出轴套的一端转动连接底座,转轴连接旋转驱动机构,转轴上设有止退环,止退环可移动地安装在转轴上,输出轴套和止退环之间设置有弹簧,输出轴套的前端设有锥形的导向槽。
10、运送间隔环时,通过垂直直线滑台输送间隔环至异形驱动轴和异形槽在同心位置,水平直线滑台水平输送间隔环靠近输出轴套,异形驱动轴与输出轴套的异形槽未对准时,异形驱动轴挤压输出轴套从而压缩弹簧,旋转输出轴套至异形驱动轴与异形槽对准时,弹簧作用输出轴套至其弹回后,异形驱动轴与异形槽完成对准配合;
11、回收间隔环时,间隔环作业机器人沿电缆运动,异形驱动轴经导向槽导向至异形驱动轴和异形槽在同心位置,间隔环作业机器人沿电缆继续运动,当异形驱动轴与输出轴套的异形槽未对准时,异形驱动轴挤压输出轴套从而压缩弹簧,旋转输出轴套至异形驱动轴与异形槽对准时,弹簧作用输出轴套至其弹回后,异形驱动轴与异形槽完成对准配合。
12、进一步地,所述旋转驱动机构包括固定连接转轴的第三直齿轮,第三直齿轮啮合第四直齿轮,第四直齿轮通过第二连接轴固定连接上链轮,第二连接轴转动连接底座,上链轮通过链条连接下链轮,下链轮转动连接支座,支座固定在间隔环作业机器人的机体底部,下链轮固定连接第三电机的活动端。
13、3.有益效果:
14、(1)本发明针对高压线缆绝缘间隔环的安装问题设计,完全适配一次安装多个间隔环的工况和任务需求。本发明依靠电机、托轨、旋进弹簧、t型导轨,以及卡槽、托槽上的相应结构之间的配合,通过旋进弹簧输送间隔环,使得间隔环在输送过程中始终处于直立状态,方便输送到顶端的时候与电缆垂直,与机器人输出轴套对准,方便安装作业。
15、(2)本发明的装置与间隔环作业机器人相匹配,间隔环通过垂直直线滑台抬升至顶端与线缆垂直对准后,继续通过水平直线滑台向间隔环作业机器人方向移动,迫使输出轴套挤压弹簧,使得输出轴套与异形驱动轴压紧,随输出轴套的旋转,异形驱动轴和输出轴套上的异形槽对准时可以自动弹开。
16、(3)本发明的装置一次可携带多个间隔环,不仅可以适配一次多个间隔环的安装过程,而且可以在拆卸时自动完成回收存放工作,避免了拆卸完毕后物料随意丢弃对环境造成的影响,也避免了二次拾取带来的成本提升。大大提高了安装和拆卸回收的效率,节约了各项成本。
技术特征:1.一种间隔环自动运送和回收装置,其特征在于,所述间隔环自动运送和回收装置安装在间隔环作业机器人的下方,间隔环作业机器人能够在电缆上行进并安装间隔环,间隔环由外部的环形绝缘壳和内部的锁紧机构组成,间隔环通过锁紧机构能够锁紧在电缆上;所述间隔环自动运送和回收装置包括固定在间隔环作业机器人上并随其同步行进的第一机体,第一机体上设有间隔环输送机构、水平直线滑台和垂直直线滑台,所述间隔环输送机构包括设置在第一机体上的t型导轨以及推动间隔环沿t型导轨滑动的推送机构,间隔环上设有滑动连接t型导轨的t型滑槽,水平直线滑台上设有用于支撑间隔环的托槽组件,托槽组件能够水平移动,托槽组件设置在t型导轨的末端,托槽组件远离t型导轨的一侧固定有背板,背板上设有卡块,卡块承接在t型导轨的末端并且能够卡入间隔环的t型滑槽内,背板上固定有电磁铁,间隔环上设有对应电磁铁的铁片,水平直线滑台连接垂直直线滑台,水平直线滑台由垂直直线滑台带动上下升降。
2.根据权利要求1所述的一种间隔环自动运送和回收装置,其特征在于,所述推送机构包括平行设置在t型导轨两侧的第一旋进弹簧和第二旋进弹簧,第一旋进弹簧的下方设有第一托轨,第二旋进弹簧的下方设有第二托轨,第一托轨和第二托轨固定在第一机体顶部,用于承托间隔环;间隔环放置在第一旋进弹簧和第二旋进弹簧之间的螺旋间隔内,第一旋进弹簧固定连接第一电机的活动端,第二旋进弹簧固定连接第二电机的活动端。
3.根据权利要求1或2所述的一种间隔环自动运送和回收装置,其特征在于,所述托槽组件包括两个对称设置的托板,托板固定在底板上,两个托板相靠近的一侧为配合间隔环设置的弧面,间隔环放置在两个托板之间。
4.根据权利要求1所述的一种间隔环自动运送和回收装置,其特征在于,所述锁紧机构包括壳体,环形绝缘壳固定在壳体外侧并将壳体包裹其中,壳体的顶部设有电缆穿插槽,间隔环顶部预留有供电缆穿过并进入电缆穿插槽的间隙,电缆穿插槽两侧对称地设有两个限位滑槽,限位滑槽内滑动连接有压块,两个压块相远离的一侧端部均设有螺纹孔,螺纹孔内螺纹连接有螺杆,螺杆转动连接在壳体上,螺杆连接齿轮传动结构。
5.根据权利要求4所述的一种间隔环自动运送和回收装置,其特征在于,所述齿轮传动结构包括固定连接螺杆的第一直齿轮,第一直齿轮啮合第二直齿轮,第二直齿轮通过第一连接轴固定连接第一锥齿轮,两个第一锥齿轮啮合同一个第二锥齿轮,第二锥齿轮固定连接异形驱动轴,异形驱动轴转动连接壳体。
6.根据权利要求5所述的一种间隔环自动运送和回收装置,其特征在于,所述间隔环作业机器人包括底座和输出轴套,输出轴套的中心设有能够与锁紧机构的异形驱动轴相配合的异形槽,异形槽内设有滑动连接的异形轴头,异形轴头固定连接转轴,转轴伸出输出轴套的一端转动连接底座,转轴连接旋转驱动机构,转轴上设有止退环,止退环可移动地安装在转轴上,输出轴套和止退环之间设置有弹簧,输出轴套的前端设有锥形的导向槽。
7.根据权利要求6所述的一种间隔环自动运送和回收装置,其特征在于,所述旋转驱动机构包括固定连接转轴的第三直齿轮,第三直齿轮啮合第四直齿轮,第四直齿轮通过第二连接轴固定连接上链轮,第二连接轴转动连接底座,上链轮通过链条连接下链轮,下链轮转动连接支座,支座固定在间隔环作业机器人的机体底部,下链轮固定连接第三电机的活动端。
技术总结本发明公开了一种间隔环自动运送和回收装置,所述间隔环自动运送和回收装置安装在间隔环作业机器人的下方,间隔环作业机器人能够在电缆上行进并安装间隔环,间隔环由外部的环形绝缘壳和内部的锁紧机构组成,间隔环通过锁紧机构能够锁紧在电缆上;所述间隔环自动运送和回收装置包括固定在间隔环作业机器人上并随其同步行进的第一机体,第一机体上设有间隔环输送机构、水平直线滑台和垂直直线滑台,所述间隔环输送机构包括设置在第一机体上的T型导轨以及推动间隔环沿T型导轨滑动的推送机构,间隔环上设有滑动连接T型导轨的T型滑槽。本发明的装置一次可携带多个间隔环,自动送料和回收,大大提高了安装的效率,节约了各项成本。技术研发人员:王天磊,成天辉,廉慧泽,黄家良受保护的技术使用者:南京工业大学技术研发日:技术公布日:2024/8/27本文地址:https://www.jishuxx.com/zhuanli/20240830/282184.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表