一种现代果园全方位采摘装置
- 国知局
- 2024-08-30 14:34:54
本技术涉及采摘领域,尤其涉及到果园采摘,具体是指一种现代果园全方位采摘装置。
背景技术:
1、我国地域辽阔,果树种植面积较大,具有丰富的水果资源,水果种植面积和产量在全球排名前列。随着种植业技术的发展,便准化果园种植模式迎来较为明显发展势头。我国的农机发展起步较晚,而采摘过程中“看到而达不到”的目标定位趋向和机械采摘过程中的枝叶遮挡等问题,仍困扰果园采摘机械化的发展。现阶段的果园采摘作业仍依靠廉价的劳动力,随着种植规模的增加和水果季节性的增强,传统的作业方式很难满足现代的生产需求。为适应采摘过程中面临的诸多问题,开发采摘装置成为广大果园种植者的迫切要求,也是推进水果领域机械化的有效途径。
2、目前在果园采摘领域达到可推广程度的机械装备种类很少,大多只针对特定水果,适应性差且采摘效率缓慢。如美国、澳大利亚、新西兰、荷兰等一些发达国家,水果采摘机械化方面取得了一定程度的发展,但是采摘机器的自由度较低,采摘时受到的限制较大,影响采摘效率。
技术实现思路
1、本实用新型针对现有技术的不足,提供一种现代果园全方位采摘装置,提高采摘机器的自由度,提高采摘效率。
2、本实用新型是通过如下技术方案实现的一种现代果园全方位采摘装置,包括摘取果实的夹爪,带动夹爪上下摆动的三级旋转机构,带动所述三级旋转机构上下摆动的二级旋转机构,以及带动所述二级旋转机构沿高度方向移动的第一驱动装置;所述第一驱动装置铰接在轴线沿高度方向延伸的一级旋转机构上,所述一级旋转机构设置在底板上的,所述底板上还设有带动一级旋转机构在纵向和横向上滑动的十字平移机构。
3、本优选方案在使用时,一级旋转机构带动二级旋转机构左右转动,二级旋转机构带动三级旋转机构上下摆动,从而实现夹爪在空间内的多个角度的转动,同时三级旋转机构带动夹爪绕三级旋转机构上下摆动,从而便于夹爪相对三级旋转机构的角度调节,从而进一步增加了夹爪的自由度,同时第一驱动装置和十字平移机构的设置,带动夹爪在横向、纵向、高度方向的移动,从而实现夹爪在空间内的移动,便于夹爪移动到任意位置,提高夹爪移动时位置的自由度,即提高采摘装置的自由度,从而提高采摘效率。
4、作为优选,所述十字平移机构包括轴接在底板上且纵向延伸的纵丝杠、螺纹连接在纵丝杠上的纵滑板,所述纵滑板上轴接有横向延伸的横丝杠,横丝杠上螺纹连接有横滑板,所述横滑板与所述一级旋转机构连接。
5、本优选方案通过纵丝杠和纵滑板的螺纹连接的设置,便于纵滑板的纵向移动,通过横丝杠和横滑板的螺纹连接的设置,便于横滑板的横向移动,即便于一级旋转机构的横向移动,从而实现一级旋转机构的纵向和横向的移动。
6、作为优选,所述底板上还设有纵向延伸且与所述纵滑板滑动连接的纵滑轨,所述纵滑板上还设有横向延伸且与所述横滑板滑动连接的横滑轨。
7、本优选方案通过纵滑轨的设置,起到支撑纵滑板的同时,也给与导向作用,通过横滑轨的设置,起到支撑横滑板的同时,也给与导向作用。
8、作为优选,所述第一驱动装置包括固接在所述一级旋转机构转动盘上的立柱,所述立柱上固接有沿高度方向延伸的竖滑轨,所述二级旋转机构的底座滑接在所述竖滑轨上,所述立柱内还铰接有沿高度方向延伸的竖丝杠,所述底座上固接有螺纹连接在竖丝杠上的竖滑块。
9、本优选方案通过竖滑块和竖丝杠的设置,便于带动二级旋转机构沿高度方向的移动。
10、作为优选,所述二级旋转机构通过机器关节铰接有三级旋转机构,所述三级旋转机构通过机器关节铰接有所述夹爪。
11、本优选方案通过机器关节的设置,便于三级旋转机构相对二级旋转机构的转动,也便于夹爪相对三级旋转机构的转动。
12、所述一级旋转机构的底面上固接有旋转支座,所述旋转支座固接在横滑板上,所述一级旋转机构转动盘的顶面上还固接有沿立柱周向排布且与立柱固接的加强板。
13、本优选方案通过加强板的设置,增强立柱与旋转支座的连接强度,保证立柱的垂直度和抗弯曲能力。
14、本实用新型的有益效果为:本优选方案在使用时,一级旋转机构带动二级旋转机构左右转动,二级旋转机构带动三级旋转机构上下摆动,从而实现夹爪在空间内的多个角度的转动,同时三级旋转机构带动夹爪绕三级旋转机构上下摆动,从而便于夹爪相对三级旋转机构的角度调节,从而进一步增加了夹爪的自由度,同时第一驱动装置和十字平移机构的设置,带动夹爪在横向、纵向、高度方向的移动,从而实现夹爪在空间内的移动,便于夹爪移动到任意位置,提高夹爪移动时位置的自由度,即提高采摘装置的自由度,从而提高采摘效率。
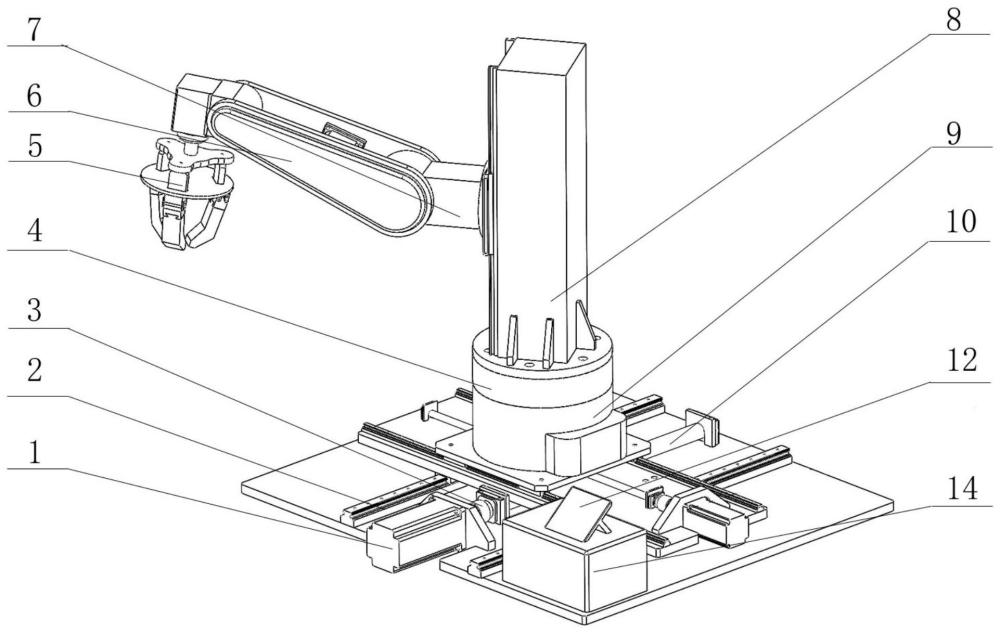
技术特征:1.一种现代果园全方位采摘装置,其特征在于:包括摘取果实的夹爪(5),带动夹爪(5)上下摆动的三级旋转机构(6),带动所述三级旋转机构(6)上下摆动的二级旋转机构(7),以及带动所述二级旋转机构(7)沿高度方向移动的第一驱动装置;所述第一驱动装置铰接在轴线沿高度方向延伸的一级旋转机构(9)上,所述一级旋转机构(9)设置在底板上的,所述底板上还设有带动一级旋转机构(9)在纵向和横向上滑动的十字平移机构。
2.根据权利要求1所述的现代果园全方位采摘装置,其特征在于:所述十字平移机构包括轴接在底板上且纵向延伸的纵丝杠(10)、螺纹连接在纵丝杠(10)上的纵滑板,所述纵滑板上轴接有横向延伸的横丝杠,横丝杠上螺纹连接有横滑板,所述横滑板与所述一级旋转机构(9)连接。
3.根据权利要求2所述的现代果园全方位采摘装置,其特征在于:所述底板上还设有纵向延伸且与所述纵滑板滑动连接的纵滑轨(2),所述纵滑板上还设有横向延伸且与所述横滑板滑动连接的横滑轨。
4.根据权利要求1所述的现代果园全方位采摘装置,其特征在于:所述第一驱动装置包括固接在所述一级旋转机构(9)转动盘上的立柱(8),所述立柱(8)上固接有沿高度方向延伸的竖滑轨(11),所述二级旋转机构的底座(13)滑接在所述竖滑轨(11)上,所述立柱(8)内还铰接有沿高度方向延伸的竖丝杠,所述底座上固接有螺纹连接在竖丝杠上的竖滑块。
5.根据权利要求1所述的现代果园全方位采摘装置,其特征在于:所述二级旋转机构(7)通过机器关节铰接有三级旋转机构(6),所述三级旋转机构(6)通过机器关节铰接有所述夹爪(5)。
6.根据权利要求4所述的现代果园全方位采摘装置,其特征在于:所述一级旋转机构(9)的底面上固接有旋转支座(4),所述旋转支座(4)固接在横滑板上,一级旋转机构(9)转动盘的顶面上还固接有沿立柱(8)周向排布且与立柱(8)固接的加强板。
技术总结本技术涉及一种现代果园全方位采摘装置,包括摘取果实的夹爪,带动夹爪上下摆动的三级旋转机构,带动所述三级旋转机构上下摆动的二级旋转机构,以及带动二级旋转机构沿高度方向移动的第一驱动装置;所述第一驱动装置铰接在轴线沿高度方向延伸的一级旋转机构上,一级旋转机构设置在底板上的,底板上还设有带动一级旋转机构在纵向和横向上滑动的十字平移机构。本技术通过一级旋转机构、二级旋转机构、三级旋转机构带动夹爪在空间内的多个角度的转动,通过第一驱动装置和十字平移机构的设置,带动夹爪在横向、纵向、高度方向的移动,从而实现夹爪在空间内的移动,提高夹爪移动时位置的自由度,即提高采摘装置的自由度,从而提高采摘效率。技术研发人员:樊桂菊,袁丙坤,王金星,薛龙震,刘春阳,张凯森受保护的技术使用者:山东农业大学技术研发日:20240117技术公布日:2024/8/27本文地址:https://www.jishuxx.com/zhuanli/20240830/282826.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种豇豆蓟马防治装置
下一篇
返回列表